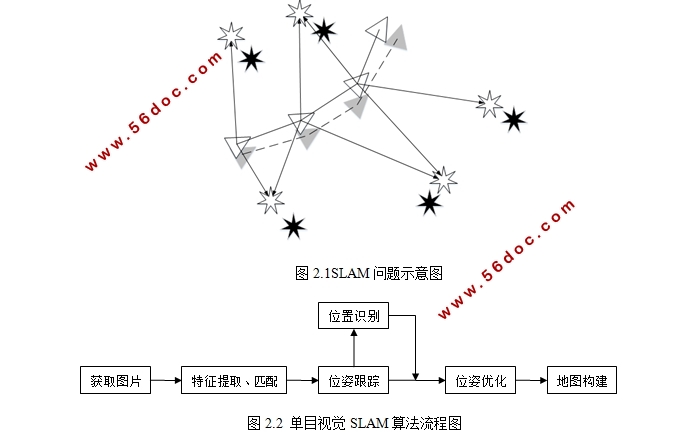
ЕЅЩуЯёЭЗSLAMММЪѕбаОП
РДдДЃК56doc.com зЪСЯБрКХЃК5D27763 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D27763
зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
ЕЅЩуЯёЭЗSLAMММЪѕбаОП(ШЮЮёЪщ,ПЊЬтБЈИц,ТлЮФ14000зж)
еЊвЊ
вЦЖЏЛњЦїШЫЭЌВНЖЈЮЛгыЕиЭМЙЙНЈ(Simultaneous Localization and MappingЃЌвдЯТМђГЦSLAM)ЪЧЕБЯТЕФЛњЦїШЫбаОПжазюЪмЙизЂЕФЮЪЬтжЎвЛЃЌдкЛњЦїШЫгЩРэТлбаОПЯђЪЕМЪгІгУЗЂеЙЕФЕРТЗЩЯгаЗЧГЃживЊЕФвтвхЁЃSLAMЕФЮЪЬтПЩвдБЛУшЪіЮЊЃКЛњЦїШЫГіЗЂЕФЦ№ЕуЮДжЊЃЌжаЭООЙ§ЕФЛЗОГвВЮДжЊЃЌжЛФмдкдЫЖЏЙ§ГЬжаИљОнздЩэДЋИаЦїНгЪеЕНЕФжмЮЇЛЗОГаХЯЂМАЩуЯёЛњЮЛзЫЕШЙРМЦдЫЖЏЙьМЃКЭДДНЈдіСПЪНЕиЭМЃЌЭЌЪБРћгУИУЕиЭМВЛЖЯИќаТздМКЕФЮЛжУКЭТЗОЖЃЌвдДяЕНЖЈЮЛЕФЙІФмЁЃ
БОЮФЛљгкЕЅЩуЯёЭЗЩшМЦВЂЪЕЯжСЫвЛИіЪгОѕSLAMЯЕЭГЃЌеыЖдДЋЭГSLAMЗНЗЈДцдкЕФЮЪЬтЃЌШчЬсШЁаЇТЪЦЋЕЭЃЌЪЕЪБадНЯВюЕШНјааСЫвЛЖЈЕФИФНјЁЃЪзЯШЭЈЙ§SLAMЗНАИЕФгХШБЕуМАЪЕЪЉПЩааЖШЕФЖдБШЃЌбЁдё PTAMММЪѕЙЙНЈSLAMЦНЬЈЃЛЦфКѓЃЌеыЖддЯЕЭГВЩгУFASTЫузгНјааЬиеїЕуМьВтЪБЃЌВЛОпгаЗНЯђадЕФШБЕуЃЌвдМАУЛгаНјаажиИДГЁОАЛиЛЗЕФШБЯнЃЌВЩгУССЖШжЪаФММЪѕМАБеЛЗМьВтЕФЗНЗЈМгвдгХЛЏЁЃ
ЪЕбщНсЙћБэУїЃЌИУЗНАИШЗЪЕФмдквЛЖЈГЬЖШЩЯЬсИпЫуЗЈЕФаЇТЪЃЌжЄУїСЫБОЮФSLAMгХЛЏЗНЗЈЕФгааЇадЁЃ
ЙиМќДЪЃКЭЌВНЖЈЮЛгыЕиЭМЙЙНЈ ЕЅФПЪгОѕ ЬиеїМьВтPTAMЙиМќжЁ
Abstract
Mobile robot Simultaneous Localization and Mapping (hereinafter referred to as SLAM) is one of the most concerned issues in current robotics research. It has a very important significance in the development of robots from theoretical research to practical application. The problem of SLAM can be described as: the starting point of the robot's departure is unknown, and the environment passing through the middle is unknown. It is only possible to estimate the motion trajectory and create an incremental map based on the surrounding environment information received by the sensor and the pose of the camera during the movement. , while using the map to constantly update their location and path to achieve the positioning function.
In this paper, a visual SLAM system is designed and implemented based on a single camera. The problems existing in traditional SLAM methods such as low extraction efficiency and poor real-time performance have been improved. Firstly, through the comparison of the advantages and disadvantages of the SLAM scheme and the feasibility of implementation, the SLAM platform was selected based on the PTAM technology. Then, when using the FAST operator to perform feature point detection in the original system, it had no directionality and did not perform loopback. The defects are optimized using the luminance center of mass technique and the closed-loop detection method.
Experimental results show that the scheme can indeed improve the efficiency of the algorithm to a certain extent, and proves the effectiveness of the SLAM optimization method in this paper.
Keywords: simultaneous localization and map building, monocular vision,Feature detection,PTAM key frame
ФПТМ
Ек1еТаїТл 1
1.1 баОПБГОАЁЂФПЕФгывтвх 1
1.2 ЙњФкЭтбаОПзДПіИХЪі 2
1.2.1 ЙњФкбаОПИХПі 2
1.2.2 ЙњЭтбаОПИХПі 2
1.3 БОЮФФкШнгыМмЙЙАВХХ 3
1.3.1 жївЊбаОПФкШн 3
1.3.2 МмЙЙАВХХ 3
Ек2еТЛљгкЕЅФПЪгОѕSLAMЕФЛљБОдРэМАЗНЗЈ 5
2.1 ЕЅФПЪгОѕSLAMЮЪЬтИХЪі 5
2.2 ЕЅФПЪгОѕSLAMЗНЗЈЕФЗЂеЙ 6
2.2.1 ЛљгкЬиеїЕФSLAMЗНЗЈ 6
2.2.2 жБНгЕФSLAMЗНЗЈ 9
2.2.3ИїжжЫуЗЈЕФБШНЯгыбЁдё 10
2.3 БОеТаЁНс 10
Ек3еТPTAMЙиМќжЁЫуЗЈМАЦфЪЕЯж 11
3.1 PTAMЬиеїЫуЗЈдРэМђНщ 11
3.2 зЗзйЯпГЬ 11
3.2.1FASTЬиеїЬсШЁ 12
3.2.2 ЕиЭМГѕЪМЛЏгыИњзйЖЈЮЛ 12
3.2.3ЙиМќжЁЕФбЁдё 13
3.3 ЛцжЦЯпГЬ 14
3.4жївЊШБЯнМАЦфИФСМ 14
3.4.1 а§зЊВЛБфадИФСМ 15
3.4.2 БеЛЗМьВтИФСМ 15
3.5БОеТаЁНс 16
Ек4еТЯЕЭГЕїЪдгыЙІФмеЙЪО 17
4.1 ШэМўЦНЬЈМђНщ 17
4.2 ЛЗОГХфжУгыЕїЪд 17
4.3 ЩуЯёЛњЕФБъЖЈ 22
4.4ЯЕЭГЙІФмНщЩмгыеЙЪО 24
4.5БОеТаЁНс 25
Ек5еТНсТлгыеЙЭћ 26
ВЮПМЮФЯз 27
жТаЛ 28
|
