摘要
采用电力电子变频装置实现电压频率协调控制,改变了同步电机历来的恒速运行不能调速的面貌,使它和异步电机一样成为调速电机大家庭的一员。本文针对同步电机中具有代表性的凸极机,在忽略了一部分对误差影响较小而使算法复杂度大大增加的因素(如谐波磁势等),对其内部电流、电压、磁通、磁链及转矩的相互关系进行了一系列定量分析,建立了简化的基于abc三相变量上的数学模型,并将其进行派克变换,转换成易于计算机控制的d/q坐标下的模型。再使用MATLAB中用于仿真模拟系统的SIMULINK对系统的各个部分进行封装及连接,系统总体分为电源、abc/dq转换器、电机内部模拟、控制反馈四个主要部分,并为其设计了专用的模块,同时对其中的一系列参数进行了配置。系统启动仿真后,在经历了一开始的振荡后,各输出相对于输出时间的响应较稳定。
关键词:同步电机 d/q模型 MATLAB SIMULINK 仿真。
The Simulation Platform of Synchronous Machine by MATLAB
Abstract:
The utilization of transducer realizes the control of voltage’s frequency. It changes the situation that Synchronous Machine is always running with constant speed. Just like Asynchronous Machine, Synchronous machine can also be viewed as a member of the timing machine. This thesis intends to aim at the typical salient pole machine in Synchronous Machine. Some quantitative analysis are made on relations of salient pole machine among current, voltage, flux, flux linkage and torque, under the condition that some factors such as harmonic electric potential are ignored. These factors have less influence on error but greatly increase complexity of arithmetic. Thus, simplified mathematic model is established on the basis of a, b, c three phase variables. By the Park transformation, this model is transformed to d, q model which, is easy to be controlled by computer. Simulink is used to masking and linking all the parts of the system. The system can be divided into four main parts, namely power system, abc/dq transformation, simulation model of the machine and feedback control. Special blocks are designed for the four parts and a series of parameters in these parts are configured. The results of simulation show that each output has a satisfactory response when there is disturbance.
Key Words: Synchronous Machine Simulation d/q Model MATLAB SIMULINK
目 录
第1章 引言 1
1.1 引言 1
1.2 同步电机概述 1
1.3 系统仿真技术概述 2
1.4 仿真软件的发展状况与应用 2
1.5 MATLAB概述 2
1.6 SIMULINK概述 4
1.7 小结 5
第2章 同步电机基本原理 6
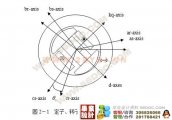
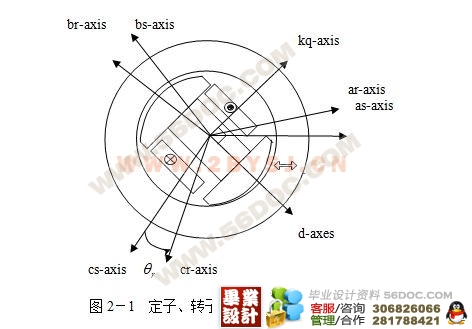
2.1 理想同步电机 6
2.2 ABC/DQ模型的建立 6
第3章 仿真系统总体设计 10
3.1 系统对象 10
3.2 系统分块 10
3.3 控制反馈环节 11
第4章 仿真系统详细设计 13
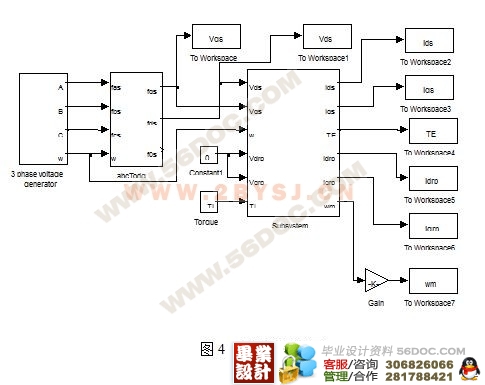
4.1 总体设计 13
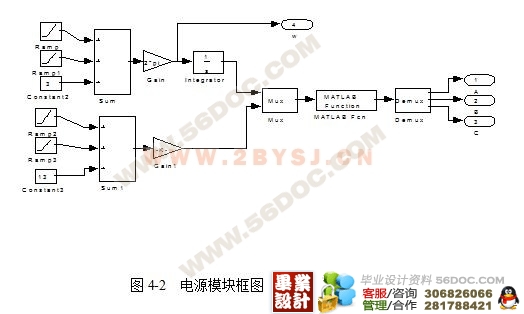
4.2 具体设计 13
4.3 控制反馈环节 16
第5章 系统仿真运行 17
5.1 输出结果稳定情况 17
5.2 小结 20
第6章 结论 21
第7章 致谢 22
参考文献 23
|