ЛљгкC51ЕЅЦЌЛњжЧФмаЁГЕЕФЩшМЦ(КЌЕчТЗЭМ,дРэЭМ)
РДдДЃК56doc.com зЪСЯБрКХЃК5D16064 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D16064
зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
ЛљгкC51ЕЅЦЌЛњжЧФмаЁГЕЕФЩшМЦ(КЌЕчТЗЭМ,дРэЭМ)(ТлЮФ8400зж,ЕчТЗЭМ,дРэЭМ,СїГЬЭМ)
еЊвЊ
жЧФмаЁГЕЪЧЕБНёПЦММжЧФмЛЏЕФВњЮяЃЌЫќФмЙЛдкааЪЛжаздЖЏбАМЃвдМАШЦЙ§еЯАЮяЕНДяФПЕФЕиЃЌБОЩшМЦВЩгУ MCS-51 ЯЕСажаЕФ C51ЕЅЦЌЛњзїЮЊдаЭЃЌвдC51зїЮЊПижЦКЫаФЃЌРћгУГЌЩљВЈДЋИаЦїМьВтЕРТЗЩЯЕФеЯАЃЌПижЦЕчЖЏаЁЦћГЕЕФздЖЏБмеЯЃЌПьТ§ЫйааЪЛЃЌвдМАздЖЏЭЃГЕЃЌВЂПЩвдЪЕЯжздЖЏМЧТМЪБМфЁЂРяГЬКЭЫйЖШЃЌздЖЏбАМЃКЭбАЙтЕШЕШЙІФмЁЃБОЮФвдЕЅЦЌЛњЮЊКЫаФЩшМЦСЫЯЕЭГНсЙЙЭМЁЂГЬађжИСюЁЂСїГЬЭМЕШЕШЃЌдкБЃСєСЫдЪМжЧФмаЁГЕПижЦЯЕЭГЕФЛљБОЙІФмЕФЭЌЪБгждіМгСЫвЛЯЕСаЕФЪЕгУЙІФмВЂМђЛЏЦфЕчТЗНсЙЙЃЌЦфНЋвдПижЦЗНБуЃЌСщЛюЃЌжЛвЊИФБфЪфШыЕЅЦЌЛњЕФПижЦГЬађЃЌБуПЩПижЦаЁГЕЕФааЪЛЙьМЃЁЃ
ЙиМќДЪЃКжЧФмаЁГЕЃЛ89C51ЃЛНсЙЙЭМЃЛПижЦ
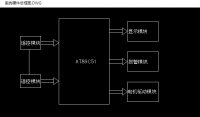
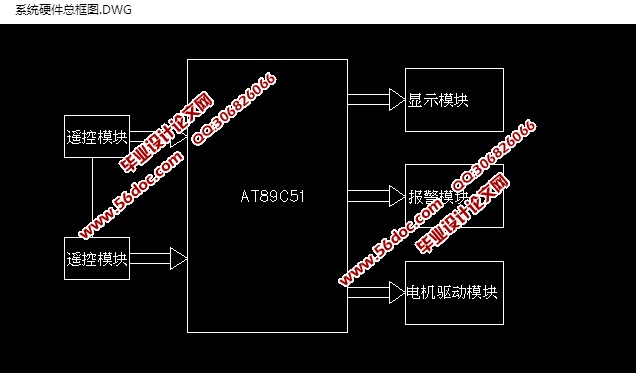
жЧФмаЁГЕзмЬхИХПі
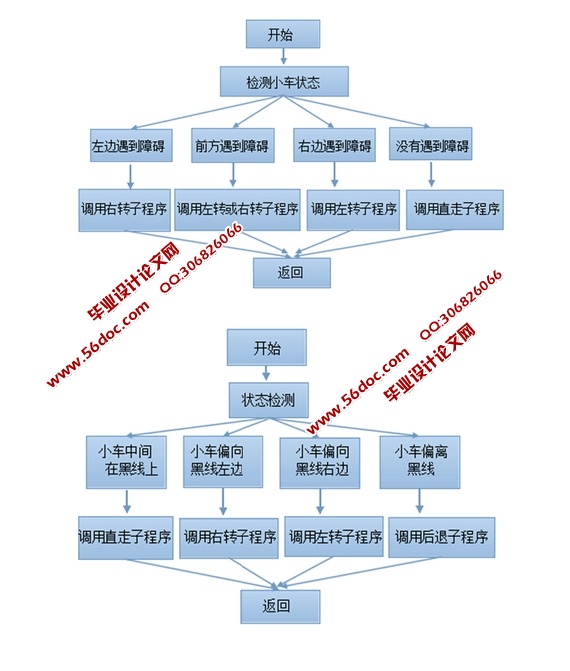
БОДЮЩшМЦЕФжЧФмаЁГЕвдC51ЮЊКЫаФЃЌОКИНгЯрЙиаОЦЌгУЕчТЗАхзджЦЖјГЩЃЌЭЈЙ§ I/O ПкМьВтаХКХЃЌЪфГіаХКХЕНL293DЃЌДгЖјЧ§ЖЏСНИіжБСїЕчЛњПижЦЦфЧАНјЁЂЭЃжЙЁЂзѓ зЊЁЂгвзЊЁЃМьВтаХКХдђЮЊШ§зщКьЭтЗЂЩфКЭНгЪеЙмЃЌвЛзщКкЯпЪБЪфГіИпЕчЦНЃЌАзЯп ЪБЪфГіЕЭЕчЦНЁЃСэСНзщКкЯпЪБЪфГіЕЭЕчЦНЃЌАзЯпЪБЪфГіИпЕчЦНЁЃ жЧФмаЁГЕЕФПижЦЦїЪЙгУ ATMEL ЙЋЫОЕФC51ЕЅЦЌЛњЁЃ ГЬађЩшМЦЩЯЪЙгУСЫЪБжгжаЖЯРДПижЦаЁГЕааЪЛЕФзДЬЌМьВтЃЌЪЙгУЭтВПжаЖЯРДМЧТМаЁГЕааЪЛЕФОрРыЃЌШэМўЩЯЩшжУСЫвЛИізДЬЌМФДцЦїЃЌРДМЧТМаЁГЕдЫааЕФзДЬЌЃЌаЁГЕЕФдЫааЮЊбгКкЯпааЪЛзДЬЌЃЌБмеЯАЮязДЬЌЕШЁЃдкКкЯпЩЯааЪЛЪБЃЌПижЦЦїМьВтКьЭтДЋИаЦїЃЌШчЙћаЁГЕааЪЛЦЋРыЗНЯђЃЌдђПижЦ аЁГЕзЊЯђТжНјаазЊЯђЁЃ дкБмеЯзДЬЌЪБЃЌПижЦЦїМьВтКьЭтДЋИаЦїЃЌХаЖЯЧАЗНЪЧЗёгаеЯАЮяЃЌШчЙћга еЯАЮядђПижЦЦћГЕНјаазЊЯђЃЌЖуБмеЯАЮяЁЃ
БОДЮПЮЬтЕФФкШнЪЧЛљгкЕЅЦЌЛњЕФжЧФмаЁГЕЕФЩшМЦЃЌвдЕЅЦЌЛњЮЊПижЦКЫаФЃЌВЩгУФЃПщЛЏЕФЩшМЦЗНАИЃЌдЫгУЙтЕчДЋИаЦїЁЂГЌЩљВЈДЋИаЦїЕШзщГЩВЛЭЌЕФМьВтЕчТЗЃЌЪЕЯжаЁГЕдкааЪЛжаздЖЏбАМЃЁЂЖуБмеЯАЮяЃЌРћгУЙтЕчДЋИаЦїНјааздЖЏбАМЃЃЌЪЕЯжСЫаЁГЕФмЙЛбизХКкЯпаазпЁЃРћгУГЌЩљВЈДЋИаЦїМьВтЕРТЗЩЯЕФеЯАЮяЁЃЭЈЙ§ЕЅЦЌЛњРДПижЦЕчЛњЕФЙЄзїЃЌДгЖјЪЕЯжЖдећИіаЁГЕЯЕЭГЕФдЫЖЏПижЦЁЃ
2.1 ЗНАИТлжЄ
МђвзадФмЃЛ ВЩгУЖЏЬЌЙВвѕЯдЪОааЪЛЪБМфКЭРяГЬЁЃ
2.2 ЯЕЭГгВМўзмЬхПђЭМ
БОДЮЩшМЦЕФжЧФмаЁГЕвдC51ЮЊКЫаФЃЌНЋЦфзїЮЊжїПиаОЦЌРДДІРэИїИіФЃПщЕФдЫгЊ
3.1 жїПиаОЦЌНщЩм
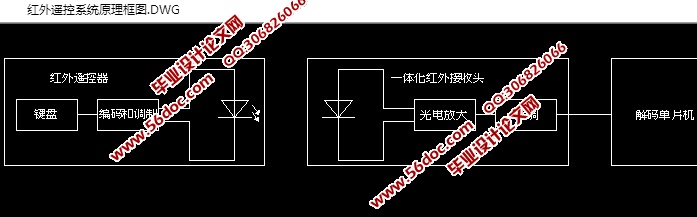
HT6221ЪЧКЯЬЉЙЋЫОЩњВњЕФЖрЙІФмвЃПиБрТыаОЦЌЃЌЙЄзїЕчбЙдк1. 8V-3.5VЃЌЦфВЩгУPPMЃЈPulse Position ModulationЃЉНјааБрТыЃЌжмЦкФмБрТы16ЮЛЕижЗТыКЭ8ЮЛЪ§ОнТыЃЌзюЖрФмЭЌЪБжЇГж32ИіЛюЖЏМќЁЃ
ФП ТМ
ЕквЛеТ аї Тл 1
1.1жЧФмаЁГЕзмЬхИХПі 2
1.2ЙњФкЭтЗЂеЙзДПі 3
1.3ПЮЬтЕФЬсГіМАжївЊШЮЮё 5
ЕкЖўеТ ЯЕЭГЗНАИЩшМЦ 6
2.1ЗНАИТлжЄ 6
2.2ЯЕЭГгВМўзмЬхПђЭМ 6
ЕкШ§еТ гВМўЕчТЗЕФЩшМЦ 10
3.1жїПиаОЦЌНщЩм 13
3.2 ULN2003аОЦЌМђНщ 13
3.3ЕЅЦЌЛњПижЦФЃПщ 15
3.3.1 ЪБжгЕчТЗ 16
3.3.2 ИДЮЛЕчТЗ 16
3.3.3 ЕЅЦЌЛњПижЦФЃПщ 17
ЕкЫФеТ ШэМўЯЕЭГЕФЩшМЦ 17
4.1жїГЬађСїГЬЭМ 17
4.2 БмеЯбМЃФЃПщГЬађЩшМЦ 18
4.2.1БмеЯГЬађСїГЬЭМ 18
4.2.2бМЃГЬађСїГЬЭМ 18
4.3 КьЭтвЃПиЯЕЭГдРэПђЭМ 19
4.4 Ъ§ОнЯдЪОФЃПщГЬађЩшМЦ 20
ЕкЮхеТ ЯЕЭГЕїЪд 22
5.1 гВМўЕїЪд 23
5.2 ШэМўЕїЪд 24
5.3 ШэгВСЊЕї 25
Нс Тл 25
ВЮПМЮФЯз 26
жТ аЛ 27
|