еЊ вЊ
ЮТЖШПижЦдкШШДІРэЙЄвеЙ§ГЬжа,ЪЧвЛИіЗЧГЃживЊЕФЛЗНкЁЃПижЦОЋЖШжБНггАЯьзХВњЦЗжЪСПЕФКУЛЕЁЃБОЮФбаОПЕФЕчТЏЪЧвЛжжОпгаДПжЭКѓЕФДѓЙпадЯЕЭГЃЌДЋЭГЕФМгШШТЏПижЦЯЕЭГДѓЖрНЈСЂдквЛЖЈЕФФЃаЭЛљДЁЩЯЃЌФбвдБЃжЄМгШШЙЄвевЊЧѓЁЃвђДЫБОЮФНЋФЃК§ПижЦЫуЗЈв§ШыДЋЭГЕФМгШШТЏПижЦЯЕЭГЙЙГЩжЧФмФЃК§ПижЦЯЕЭГЁЃ
БОЮФвдФЃК§здећЖЈ PID ПижЦЫуЗЈЮЊЛљДЁЃЌЩшМЦвд8031ЕЅЦЌЛњЮЊжїЬхЕФПижЦЯЕЭГПижЦЕчТЏ,ЙЙГЩвЛИіФмНјааНЯИДдгЕФЪ§ОнДІРэКЭИДдгПижЦЙІФмЕФжЧФмПижЦЦїЃЌЪЙЦфМШПЩгыЮЂЛњХфКЯЙЙГЩПижЦЯЕЭГЃЌгжПЩзїЮЊвЛИіЖРСЂЕФЕЅЦЌЛњПижЦЯЕЭГЃЌОпгаНЯИпЕФСщЛюадКЭПЩППадЁЃЕЅЦЌЛњИљОнЪфШыЕФИїжжУќСюЃЌНјаажЧФмЫуЗЈЕУЕНПижЦжЕЃЌЪфГіТіГхДЅЗЂаХКХЃЌЭЈЙ§Й§СуДЅЗЂЕчТЗЧ§ЖЏЫЋЯђПЩПиЙшЃЌДгЖјМгШШЕчТЏЁЃ(БЯвЕЩшМЦЭј )
БОЮФЬсГіЕФЛљгкФЃК§ЕФздећЖЈ PID ПижЦЫуЗЈЕФПижЦЯЕЭГОпгаеце§ЕФжЧФмЛЏКЭСщЛюадЃЌгаздЖЏМьВтЁЂЪ§ОнЪЕЪБВЩМЏЁЂДІРэМАПижЦНсЙћЯдЪОЕШЙІФмЃЌЖдЬсИпЕчТЏЮТЖШЕФПижЦОЋЖШОпгаНЯКУЕФвтвхЁЃ
ЙиМќДЪЃКЕчТЏЃЛЕЅЦЌЛњЃЛФЃК§ PIDЁЃ
Abstract
Temperature in heat treatment craft is very important. Control precision effect directly the quality of the product. The electric stove is a kind pure great inertia system, and the traditional heat control system is based on some certain model, so is hard to satisfy the technological requirement.This paper will adopt fuzzy control algorithm to build a intelligent fuzzy control system.
In this paper, we use fuzzy self-regulated PID algorithmt to design a electric stove control system depending on mainly 8031 chip and build a intelligent controller which can process complicated data and realize complicated control functiong, meanwhile is alao regarded as an independent SCM control system which has higher flexibility and dependability. The SCM accords to all kinds input orders to carry out intelligent algorithm in order to get control value, then to feed out the pulse signal to trigger circuit and drive the two-way silicon in order to heat the stove.
The control system based fuzzy self-regulated PID algorithm has real intelligence and flexibility. The functions include automatic detection, real-time data gather and precess and displaying the control output and so on, which do well in improving the control precision.
KeywordЃКElectric stoveЃЛSCMЃЛFuzzy PID.
ФЃК§ PID ПижЦ
ФЃК§ПижЦЕФИХФюЪЧгЩУРЙњМгРћИЃФсбЧДѓбЇжјУћНЬЪк L.A.Zaden ЪзЯШЬсГіЕФЃЌОЙ§20ЖрФъЕФЗЂеЙЃЌФЃК§ПижЦШЁЕУСЫжѕФПЕФГЩОЭЁЃФЃК§ПижЦЪЪгУгкЗЧЯпадЁЂЪ§бЇФЃаЭВЛШЗЖЈЕФПижЦЖдЯѓЃЌЖдБЛПиЖдЯѓЕФЪБжЭЗЧЯпадКЭЪББфадОпгавЛЖЈЕФЪЪгІФмСІЃЌЭЌЪБЖддыЩљвВгаНЯЧПЕФвжжЦзїгУЃЌМДТГАєадНЯКУЁЃЕЋФЃК§ПижЦЦїБОЩэЯћГ§ЯЕЭГЮШЬЌЮѓВюЕФадФмБШНЯВюЃЌФбвдДяЕННЯИпЕФПижЦОЋЖШЁЃЖј PID ПижЦе§КУПЩвдУжВЙЦфВЛзуЃЌНќФъРДвбгаВЛЩйНЋФЃК§ММЪѕгыДЋЭГММЪѕНсКЯЦ№РДЩшМЦФЃК§ТпМПижЦЕФЯШР§ЁЃдкЮФЯзжаНщЩмСЫЖржжФмЬсИп PIDПижЦОЋЖШЕФФЃК§ PID ЛьКЯПижЦЗНАИЃЌР§ШчЃКв§ШыЛ§ЗжвђзгЕФФЃК§ PID ПижЦЦїЃЛЛьКЯаЭФЃК§ PID ПижЦЦїЃЛСэЭтНЋЦфгыЦфЫќЯШНјПижЦММЪѕНсКЯгжгаФЃК§здЪЪгІ PID ПижЦЁЂЩёОЭјТчФЃК§ PID ПижЦЕШЁЃ[6]
ФЃК§здећЖЈ PID ПижЦ
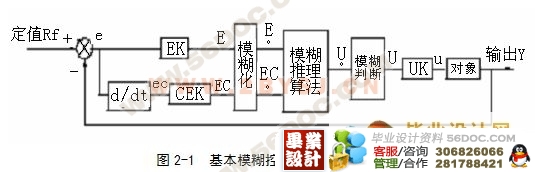
ФЃК§здећЖЈ PID ПижЦЪЧдквЛАу PID ПижЦЯЕЭГЕФЛљДЁЃЌМгЩЯвЛИіФЃК§ПижЦЙцдђЛЗНкЃЌРћгУФЃК§ПижЦЙцдђдкЯпЖд PID ВЮЪ§НјаааоИФЕФвЛжжздЪЪгІПижЦЯЕЭГЁЃЫќвдЮѓВюeКЭЮѓВюБфЛЏecзїЮЊЪфШыЃЌПЩвдТњзуВЛЭЌЪБПЬЕФeКЭecЖдВЮЪ§здећЖЈЕФвЊЧѓЁЃЫќНЋФЃК§ПижЦКЭ PID ПижЦЦїСНепНсКЯЦ№РДЃЌбяГЄБмЖЬЃЌМШОпгаФЃК§ПижЦСщЛюЖјЪЪгІадЧПЃЌЕїНкЫйЖШПьЕФгХЕуЃЌгжОпга PID ПижЦЮоОВВюЁЂЮШЖЈадКУЁЂОЋЖШИпЕФЬиЕуЃЌЖдИДдгПижЦЯЕЭГКЭИпОЋЖШЫХЗўЯЕЭГОпгаСМКУЕФПижЦаЇЙћЁЃ(БЯвЕЩшМЦЭј )
ФП ТМ
Ек1еТ аїТл 1
1.1 в§бд 1
1.2 ПижЦЦїЗЂеЙЯжзД 1
1.2.1 PID ПижЦЦїЕФЗЂеЙЯжзД 1
1.2.2 ФЃК§ PID ПижЦ 2
1.2.3 ФЃК§здећЖЈ PID ПижЦ 2
1.3 ЕчТЏВЩгУФЃК§здећЖЈ PID ПижЦЕФПЩааад 2
Ек2еТ ФЃК§здећЖЈ PID ПижЦЦїЕФЩшМЦ 4
2.1 ФЃК§ЭЦРэЛњЕФЩшМЦ 4
2.1.1 ФЃК§ЭЦРэЛњЕФНсЙЙ 4
2.1.2 ФЃК§ЭЦРэЛњЕФЩшМЦ 4
2.1.2.1 ОЋШЗСПЕФФЃК§ЛЏ 5
2.1.2.2 НЈСЂФЃК§ПижЦЙцдђКЭФЃК§ЙиЯЕ 5
2.1.2.3 ЪфГіаХЯЂЕФФЃК§ОіВп 6
2.2 ФЃК§здећЖЈ PID ПижЦЦї 6
2.2.1 PID ВЮЪ§Жд PID ПижЦадФмЕФгАЯь 6
2.2.2 ФЃК§здећЖЈ PID ПижЦЦї 7
2.3 ФЃК§здећЖЈ PID ПижЦЦїадФмЕФбаОП 8
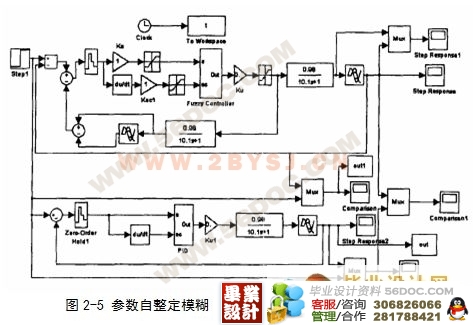
2.3.1 Matlab ЗТецНсЙЙЭМ 8
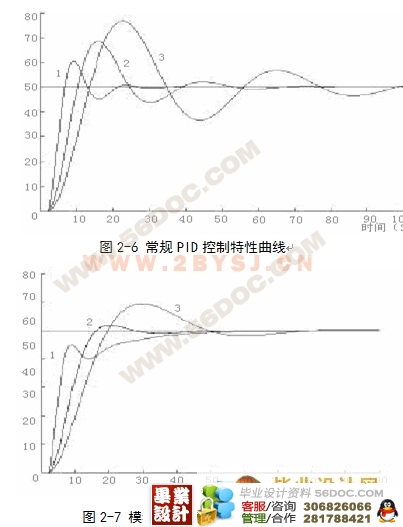
2.3.2 ЙпадЪБМфГЃЪ§ЕФгАЯь 9
2.4 ЗТецНсЙћЗжЮі 10
(БЯвЕЩшМЦЭј )
Ек3еТ ЯЕЭГгВМўКЭЕчТЗЩшМЦ 11
3.1в§бд 11
3.2 ЯЕЭГЕФзмЬхНсЙЙ 11
3.3 ЮТЖШМьВтЕчТЗ 12
3.3.1 ЮТЖШДЋИаЦї 12
3.3.2 ВтСПЗХДѓЦїЕФзщГЩ 12
3.3.3 ШШЕчХМРфЖЫЮТЖШВЙГЅЗНЗЈ 13
3.4 ЖрТЗПЊЙиЕФбЁдё 13
3.5 A/DзЊЛЛЦїЕФбЁдёМАСЌНг 14
3.6 ЕЅЦЌЛњЯЕЭГЕФРЉеЙ 15
3.6.1 ЯЕЭГРЉеЙИХЪі 15
3.6.2 ГЃгУРЉеЙЦїМўМђНщ 16
3.7 ДцДЂЦїЕФРЉеЙ 17
3.7.1 ГЬађДцДЂЦїЕФРЉеЙ 17
3.7.1.1жЛЖСДцДЂЦїМђНщ 17
3.7.1.2 EPROM2764МђНщ 17
3.7.2 Ъ§ОнДцДЂЦїЕФРЉеЙ 18
3.7.2.1Ъ§ОнДцДЂЦїИХЪі 18
3.7.2.2ОВЬЌRAM6264МђНщ 19
3.7.2.3Ъ§ОнДцДЂЦїРЉеЙОйР§ 19
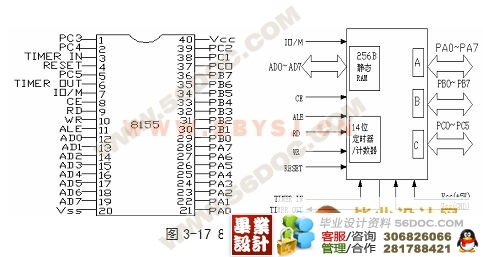
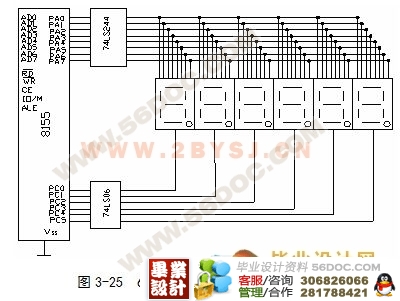
3.8 ЕЅЦЌЛњI/OПкЕФРЉеЙЃЈ8155РЉеЙаОЦЌЃЉ 20
3.8.1 8155ЕФНсЙЙКЭв§НХ 20
3.8.2 8155ЕФПижЦзжЕФМАЦфЙЄзїЗНЪН 21
3.8.3 8155гы8031ЕФСЌНг 22
3.9 ПДУХЙЗЁЂБЈОЏЁЂИДЮЛКЭЪБжгЕчТЗЕФЩшМЦ 23
3.9.1ПДУХЙЗЕчТЗЕФЩшМЦ 23
3.9.2БЈОЏЕчТЗЕФЩшМЦ 23
3.9.3ИДЮЛЕчТЗЕФЩшМЦ 24
3.9.4 ЪБжгЕчТЗЕФЩшМЦ 25
3.10 МќХЬгыЯдЪОЕчТЗЕФЩшМЦ 25
3.10.1 LEDЪ§ТыЯдЪОЦїЕФНгПкЕчТЗ 25
3.10.2МќХЬНгПкЕчТЗ 26
3.11 DAC7521Ъ§ФЃзЊЛЛНгПк 27
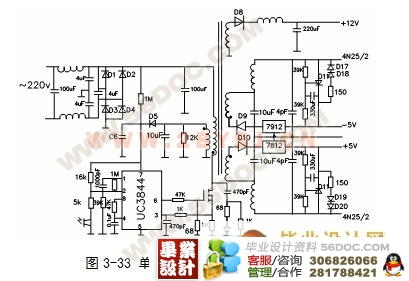
3.12 ИєРыЗХДѓЦїЕФЩшМЦ 28
3.13 ПЩПиЙшЕїЙІПиЮТ 29
3.13.1Й§СуДЅЗЂЕїЙІЦїЕФзщГЩ 29
3.13.2жївЊЕчТЗНщЩм 30
3.14 ЕЅЦЌЛњПЊЙиЮШбЙЕчдДЩшМЦ 31
Ек4еТ ЯЕЭГШэМўЩшМЦ 32
4.1 жївЊГЬађЕФПђЭМ 32
4.1.1жїГЬађПђЭМ 32
4.1.2МќХЬжаЖЯЗўЮёзгГЬађ 33
4.1.3КуЮТМАЩ§ЮТВтПизгГЬађ 34
4.1.4НЕЮТВтПизгГЬађ 35
4.2 ФЃК§здећЖЈ PID ПижЦЫуЗЈ 36
жТаЛ 39
ВЮПМЮФЯз 40
ИНТМ 42
ВЮПМЮФЯз
[1] аьНЈСж,ГТГЌ.ФЃК§ПижЦдкШШДІРэЕчзшТЏжаЕФгІгУбаОП.ШШМгЙЄве,2002,(5):58-60
[2] Z.R.Radakovic, V.M.Milosevic, S.B.Radakovic. Application of Temperature Fuzzy Controller in an Indirect Resistance Furnace. Applied Energy, 2002:167-182
[3] St.Boschert,P.Dold,K.W.Benz.Modelling of the Temperature Distribution in a Three-zone Resistance Furnace: Influence of Furnace Configuration and Ampoule Position.Journal of Crystal Growth,1998:140-149
[4] ЭѕМвшхБржј.ЕїНкЦїгыжДааЦї.ББОЉ:ЧхЛЊДѓбЇГіАцЩч,2001:68-72,47-57
[5] аьбЇЗхжїБр.ДЋИаЦїБфЫЭЦїВтПивЧБэДѓШЋ.ББОЉ:ЛњаЕЙЄвЕГіАцЩч,1998:223
[6] аЛаТУё,ЖЁЗцБржј.здЪЪгІПижЦЯЕЭГ.ББОЉ:ЧхЛЊДѓбЇГіАцЩч,2002:1-5,158-161
[7] РюЪПгТ.ФЃК§ПижЦКЭжЧФмПижЦРэТлгыгІгУ.Йў Жћ Бѕ:ЙўЖћБѕЙЄвЕДѓбЇГіАцЩч,
1990:78-80
[8] жюОВЕШ.ФЃК§ПижЦдРэгыгІгУ.ББОЉ:ЛњаЕЙЄвЕГіАцЩч,1995:338-344;258-261
[9] РюзПЃЎЛљгкФЃК§ЭЦРэЕФздЕїећPIDПижЦЦїЃЎПижЦРэТлгыгІгУЃЌЃБ997,(2):238-243
[10] ЭѕжвгТ,ВЬдЖРћ,СѕЮФН,ЕШ.ЕЅВЮЪ§ Fuzzy-PID ПижЦЦї.ЙЄвЕвЧБэгыздЖЏЛЏзАжУ,
1997,(4): 18-21
[11] НаТЧй,ГТЪїЬФ,ТНЯђГЩ.вЛжжЕЅВЮЪ§ФЃК§ PID ПижЦЕФЮЂЛњРјДХЕїНкЦї.ИЃНЈЕчСІгыЕчЙЄ,2002,(2):12-13
[12] РюзП,ЯєЕТдЦ,КЮЪРжв.ЛљгкЩёОЭјТчЕФФЃК§здЪЪгІ PID ПижЦЫуЗЈ.ПижЦгыОіВп,
1996,(3):340-345(БЯвЕЩшМЦЭј )
[13] МЭДП.ЬЦИжжааЭГЇ650МгШШТЏжЧФмФЃК§ПижЦЯЕЭГ.ЃлББОЉЙЄвЕДѓбЇЙЄбЇЫЖЪПТлЮФЃн.
1997: 53-60,14-15
[14] СѕгІЫЌ.ИпЮТЕчзшТЏНгЕуПижЦИФЮЊЮоНгЕуЕФПЩПиЙшПижЦ.ЙЄвЕМЦСП,2001,діПЏ:153-154
[15] ЙЫУїЮФ.ПЩПиЙшЮТПиЦїЕФЙЄзїдРэМАЙЪеЯЮЌао.ЪЕбщЪвбаОПгыЬНЫї,1995,(3):74-75
[16] жЃбЉУЗ,НЊГЩЙњ,жмЙуУњ.ФЃК§PIDПижЦЦїНсЙЙ.ДѓЧьЪЏгЭбЇдКБЈ,2000,24(3):46-50
[17] еХЛЏЙт,КЮЯЃЧк.ФЃК§здЪЪгІПижЦРэТлМАЦфгІгУ.ББОЉ:ББОЉКНПеКНЬьДѓбЇГіАцЩч,
2002:167-169,26-28
[18] Jen Yang. Chen. Rule Regulation of Sliding Mode Controller Design:Direct Adaptive Approach. Fuzzy Sets and Systems, 2001,120:159-168
[19] СѕН№яПжј.ЯШНјPIDПижЦМАЦфMATLABЗТец.ББОЉ:ЕчзгЙЄвЕГіАцЩч,2003:1-12,7-12,67-81
[20] еХЪидЊ,РшРћКь.ЖЏЬЌЙ§ГЬжа PID ПижЦВЮЪ§ФЃК§ећЖЈЕФЬНЫї.ПѓвБЙЄГЬ,2000,(2):22-24
[21] еХНЈУё,ЭѕЬЮ,ЭѕжвРёБржј.жЧФмПижЦдРэМАгІгУ.ББОЉ:вБН№ЙЄвЕГіАцЩч,2003:60-64
[22] СѕБЊжїБр.ЯжДњПижЦРэТл.ББОЉ:ЛњаЕЙЄвЕГіАцЩч,2000:251-253
[23] КЮбмЧь,НЊНн,НбоО§,ЕШ.ПижЦЯЕЭГЗжЮіЁЂЩшМЦКЭгІгУЃMATLABгябдЕФгІгУ.ББОЉ:
ЛЏбЇЙЄвЕГіАцЩч,2002:291-296,194-205
[24] аЛдЊЕЉ,ЯФЪчбо.PIDЕїНкЦїВЮЪ§ЕФМЬЕчздећЖЈЗНЗЈ.ПижЦгыОіВп,1993,8(1):77-79
[25] аЛдЊЕЉ,ъЛЪЄ.PIDМЬЕчздећЖЈМИжжЫуЗЈЕФБШНЯ.здЖЏЛЏгывЧЦївЧБэЃЌ1993,(4)ЃК20-24
[26] Эєбѓ,ёвМќ.вЛжжЛљгкЕнЭЦВЮЪ§ЙРМЦЕФPIDВЮЪ§здећЖЈЗНЗЈ.ЯЂгыПижЦ,1996,(4)ЃК 182-185
[27] аьПЦОќ,ГТШйБЃ,еХГчЮЁжј.здЖЏМьВтКЭвЧБэжаЕФЙВадММЪѕ.ББОЉ:ЧхЛЊДѓбЇГіАцЩч,
2000:31-34
[28] ЖЁгёУР,ИпЮїШЋ,ХэбЇго.Ъ§зжаХКХДІРэ.ЮїАВ:ЮїАВЕчзгПЦММДѓбЇГіАцЩчЃЌ2000ЃК 73-93
[29] ТЅЫГЬь,КњВ§ЛЊ,еХЮА. ЛљгкMATLABЕФЯЕЭГЗжЮігыЩшМЦЃФЃК§ЯЕЭГ.ЮїАВ:ЮїАВЕч
згПЦММДѓбЇГіАцЩч,2001:61-122
[30] УЯЗБЪЂ,бюдТОќ,ДобвЕШ.60S2MnИжЁАСуБЃЮТЁБДуЛ№ЙЄвеЕФЪдбщбаОП.ИЗаТПѓвЕбЇдК
бЇБЈ(здШЛПЦбЇАц),1994,13(4):64-68
[31] ЩНЖЋЙЄвЕДѓбЇБржј.ШШДІРэЩшБИ.ЩНЖЋ:ЩНЖЋЙЄвЕДѓбЇ.1984:57-71
[32] ЭѕбЇЧА.АТЪЯЬхзДЬЌПижЦМАСуБЃЮТМгШШЙЄве.ЫФДЈЙЄвЕбЇдКбЇБЈЃЌ1994ЃЌ13(4)23-24
[33] ЭѕбЇЧА,ЛєН№ЩН.МгШШЙ§ГЬПижЦМАЭИЩеМьВт.ЫФДЈЙЄвЕбЇдКбЇБЈ,1997,16(1):1-8
[34] РюМвВ§жїБр.здЖЏПижЦвЧБэ.ЮфКК:ЮфККЙЄвЕДѓбЇГіАцЩч,1990:11-23
[35] РюУї.ШШЕчХМЕФРфЖЫВЙГЅМАЯпадДІРэ.УКЬППЦбЇММЪѕ,1996,24(2):20-24
[36] БЯбЕвј.ШШЕчХМВЮПМЖЫЕФМИжжВЙГЅЗНЗЈ.вЧБэММЪѕгыДЋИаЦї,1998,(3):29-31
[37] еХЧьСс.ШШЕчХМДЋИаЦїВтЮТЯЕЭГЕФЩшМЦгІгУ.ЮїББЧсЙЄвЕбЇдКбЇБЈ,2000,18(1):
82-85
[38] Эѕчх,ЭѕгёЬяБржј.МЏГЩМьВтЕчТЗдРэгыЩшМЦ.ББОЉ:БјЦїЙЄвЕГіАцЩч,1996:22-25
[39] еХвуИе,ХэЯВдД,ЬЗЯўОќЕШБржј.MCS-51ЕЅЦЌЛњгІгУЩшМЦ.ЙўЖћБѕ:ЙўЖћБѕЙЄвЕДѓбЇ
ГіАцЩч, 2000:75-101,152-161,88-90,241-248,294-295
[40] ТожОРЄЃЌаьжВЯЭЃЎДЎааПЩБрГЬМрПиЦїМўEEPROMМАЦфгІгУЃЎЕчзгММЪѕЃЌ1998,(12):
564-567
[41] еХжЧНм.AD574дкЪ§ОнВЩМЏжаЕФгІгУЙњЭтЕчзгдЊЦїМў,2003,(6):55-56
[42] едИКЭМжїБр.ЯжДњДЋИаЦїМЏГЩЕчТЗ.ШЫУёгЪЕчГіАцЩч,2000:303-304
ВПЗжГЬађЃК
ORG 0000H
LAMP main
ORG 0003H
AJMP PINTO
ORG 000BH
Ajmp BRTO
ORG 0013H
Ajmp INT1
Main: MOV SP, 20H
CLR A
MOV 21HЃЌ A
MOV 22HЃЌ A
MOV 23HЃЌ A
MOV 24HЃЌ A
MOV 25HЃЌ A
MOV 26HЃЌ A
MOV 27HЃЌ A
MOV 28HЃЌ A
MOV 29HЃЌ A
MOV 2AHЃЌ A
MOV 2BHЃЌ A
MOV 2CHЃЌ A
MOV 2DHЃЌ A
MOV 2FHЃЌ A
MOV 30HЃЌ A
MOV 31HЃЌ A
MOV 32H, A ЃЛЯдЪОЛКГхЧј
MOV 33HЃЌ A
MOV 34HЃЌ A
MOV 35H, A ЃЛ КуЮТЮТЖШднДцЧј
MOV 36HЃЌ A
MOV 37HЃЌ A
MOV 38H, A
MOV 39H, A ЃЛЩ§ЮТЫйТЪднДцЧј
MOV 3AHЃЌ A
MOV 3BHЃЌ A ЃЛКуЮТЪБМфднДцЧј
MOV 3EHЃЌ A
MOV 4AH, A ЃЛНЕЮТЫйТЪднДцЧј
MOV 4BHЃЌ A
MOV 4CHЃЌ A
MOV 4FHЃЌ A
MOV 50HЃЌ A
MOV 51HЃЌ A e(k-1)
MOV 52HЃЌ A
MOV 53HЃЌ A
MOV 54H, A ІЄe(k-1)
MOV 55HЃЌ A
MOV 56HЃЌ A
MOV 57HЃЌ A u(k-1)
MOV 58H, A
MOV 59HЃЌ A
MOV 5AHЃЌ A u(k)
MOV 5BHЃЌ A
MOV 5CH, A
MOV 5DH, A 2ЕФЕЅдЊ |
