ЛљгкЕЅЦЌЛњЕФЧхНрЛњЦїШЫЩшМЦ(КЌCADдРэЭМСуМўЭМзАХфЭМ)
РДдДЃК56doc.com зЪСЯБрКХЃК5D21583 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D21583
зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
ЛљгкЕЅЦЌЛњЕФЧхНрЛњЦїШЫЩшМЦ(КЌCADдРэЭМСуМўЭМзАХфЭМ)(ТлЮФЫЕУїЪщ22000зж,ЭтЮФЗвы,CADЭМ10еХ)
еЊЁЁЁЁвЊ
ЫцзХШЫУЧЩњЛюжЪСПЕФЬсИпЃЌШЫУЧдНРДдНжиЪгефЯЇЪБМфЃЌИќЧуЯђгкНЋЪБМфЗХдкИќМггавтвхЕФЪТЧщЩЯЃЌЖјВЛЪЧНЋЪБМфРЫЗбдкДђЩЈЮРЩњКЭећРэМвЮёЩЯЃЌВЂЧвЩњЛюНкзрвВдНРДдНПьЃЌШЫУЧвВУЛгаЬЋЖрЪБМфШЅећРэЮРЩњЁЃЕЋЪЧЖдЩњЛюЪцЪЪЕФОгзЁЛЗОГЕФзЗЧѓВЂЮДМѕШѕЃЌЗДЖјИќМгзЗЧѓИпЦЗжЪЕФЩњЛюЁЃ
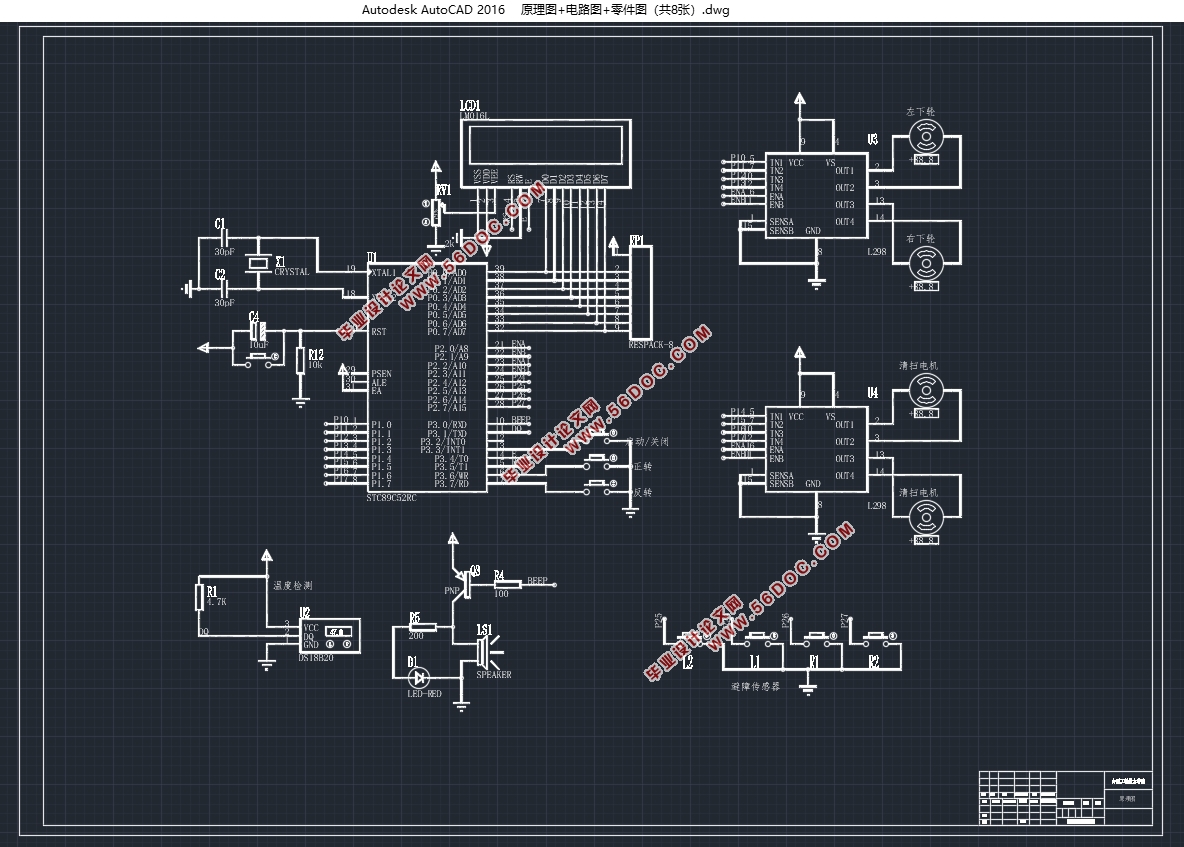
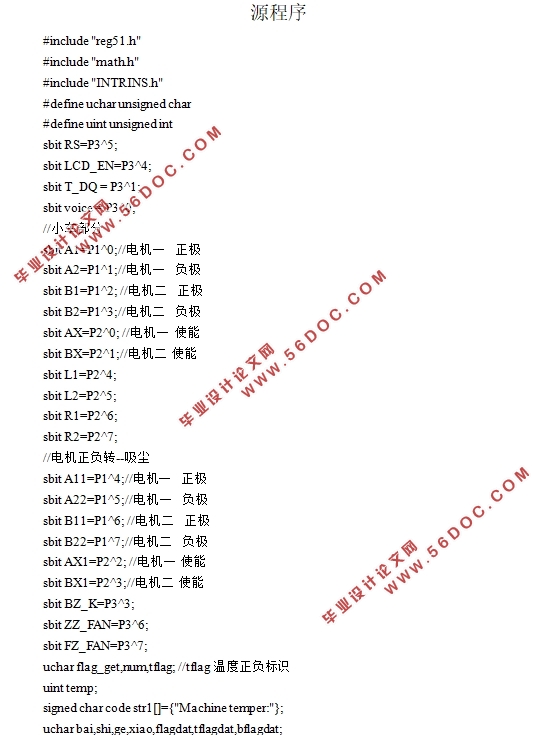
БОЮФбаОПЕФжївЊФкШнОЭЪЧЛљгкЕЅЦЌЛњЕФЧхНрЛњЦїШЫЩшМЦЁЃИУЩшМЦвдSTC89C52RCЕЅЦЌЛњЮЊПижЦКЫаФЃЌгЩL298N Ч§ЖЏжБСїЕчЛњЪЕЯжаЁГЕдЫЖЏааЪЛЙІФмЃЛЫФИіКьЭтБмеЯДЋИаЦїШЅВЩМЏеЯАЮяаХЯЂЪЕЯжздЖЏБмеЯЙІФмЃЛФмЙЛЪЕЪБМрВтЧхНрЛњЦїШЫЕФжїЛњЮТЖШЃЌЕБЮТЖШГЌЙ§ЩшЖЈЮТЖШЪБЃЌЦєЖЏЩљЙтБЈОЏЦїЬсЪОжїШЫЭЃжЙЛњЦїШЫЕФдЫааЃЛгыДЫЭЌЪБЃЌгЩL298NЧ§ЖЏ2ИіЧхЩЈжБСїЕчЛњЃЌвдГфзуЕФЖЏСІЯЕЭГЪЕЯжЖдЛвГОЛђепРЌЛјЕФЧхЩЈЙІФмЁЃећИіЩшМЦЕФЩшМЦНсЙЙЧхЮњЃЌВЩгУадМлБШБШНЯИпЕФдЊЦїМўЃЌЪЕЯжЧхНрЛњЦїШЫЕФЛљБОЙІФмЁЃ
ЙиМќДЪЃКЧ§ЖЏЩшМЦЃЛБмеЯЩшМЦЃЛЮТЖШМрПиЃЛЩљЙтБЈОЏЃЛ
Design of cleaning robot based on MCU
ABSTRACT
With the improvement of people’s quality of life, people pay more and more attention to cherishing time, preferring to spend time on more meaningful things, rather than wasting time on cleaning and housekeeping, and the pace of life is getting more and more. Soon, people don't have much time to organize hygiene. However, the pursuit of a comfortable and comfortable living environment has not diminished. Instead, it has pursued a higher quality of life. So the sweeping robot came into being. It can replace the owner to clean the entire living environment, save the owner's valuable time, and intelligently maintain the surrounding sanitation.
The main content of this paper is the design of the cleaning robot based on single-chip microcomputer. The design uses the STC89C52RC microcontroller as the control core, and the L298N drives the DC motor to realize the car sports driving function; four infrared obstacle avoidance sensors collect obstacle information to achieve automatic obstacle avoidance function; and can real-time monitor the host temperature of the cleaning robot when the temperature exceeds the design. When the temperature is set, an audible and visual alarm is activated to prompt the owner to stop the operation of the robot. At the same time, two cleaning DC motors are driven by the L298N to clean the dust or garbage with a sufficient power system. The design structure of the entire design is clear, and components with relatively high cost performance are used to achieve the basic functions of the sweeping robot.
Key Words: Driving design; obstacle avoidance design; temperature monitoring; audible and visual alarmЃЛ
змЬхЩшМЦЗНАИ
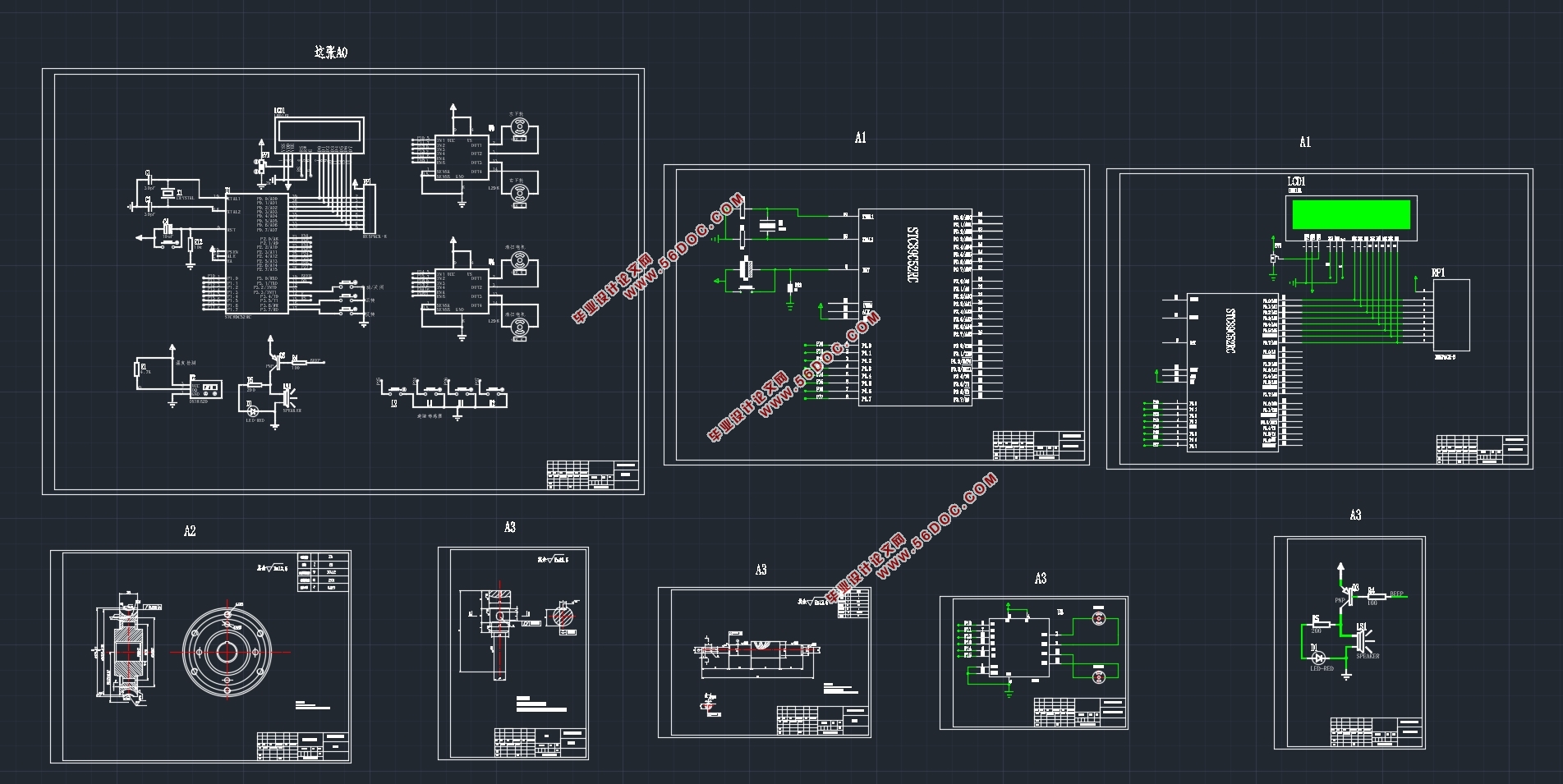
БОЮФжавЊЩшМЦвЛПюЛљгкЕЅЦЌЛњЕФЧхНрЛњЦїШЫЃЌИУЧхНрЛњЦїШЫашвЊЪЕЯжздЖЏБмеЯЁЂГфзуЖЏСІЧхЩЈвдМАЮТЖШЪЕЪБМрВтЃЌГЌЯоБЈОЏЕФЙІФмЁЃШчЭМ 3 1ЫљЪОЃЌЪЧБОЩшМЦжаЕФдРэПђПђМмЭМЁЃгЩЭМПЩжЊЃЌЛљгкЕЅЦЌЛњЕФЧхНрЛњЦїШЫЪЧгЩжїПиЕЅЦЌЛњЁЂЕчЛњЧ§ЖЏЁЂжБСїЕчЛњЁЂЯдЪОФЃПщЁЂКьЭтБмеЯДЋИаЦїФЃПщЁЂАДМќФЃПщЕШзщГЩЁЃЦфжажїПиЕЅЦЌЛњВЩгУSTC89C52RCЕЅЦЌЛњЃЌЕчЛњЧ§ЖЏгУL298NЃЌЮТЖШВЩМЏФЃПщгУЕФЪЧDS18B20ЮТЖШДЋИаЦїЃЌЭЈЙ§LCD1602вКОЇЯдЪОЦСРДМрВтЛњЦїЙЄзїЕФЪЕЪБЮТЖШЁЃБОеТжївЊЪЧЖджїПиЕЅЦЌЛњЁЂЕчЛњЧ§ЖЏЁЂЮТЖШДЋИаЦїЁЂБмеЯДЋИаЦїЁЂЯдЪОФЃПщЩшМЦЗНАИНјааТлжЄВЂзюжеШЗСЂВЩгУЕФдЊЦїМўЁЃ
ФПЁЁЁЁТМ
еЊЁЁЁЁвЊ i
ABSTRACT ii
1. аїТл 1
1.1 ПЮЬтБГОА 1
1.2 баОПФПЕФКЭвтвх 1
1.3 ЩшМЦвЊЧѓ 1
2. ЙњФкЭтЯрЙиВњЦЗбаОП 3
2.1 ЙњЭтВњЦЗбаОПзДПі 3
2.2 ЙњФкВњЦЗбаОПЯжзД 8
3. ЗНАИТлжЄ 10
3.1 змЬхЩшМЦЗНАИ 10
3.2 жїПиЕЅЦЌЛњЕФбЁдё 10
3.3 ЕчЛњЧ§ЖЏЕФбЁдё 11
3.4 ЮТЖШДЋИаЦїЕФбЁдё 12
3.5 БмеЯДЋИаЦїЕФбЁдё 13
3.6 ЯдЪОФЃПщЕФбЁдё 13
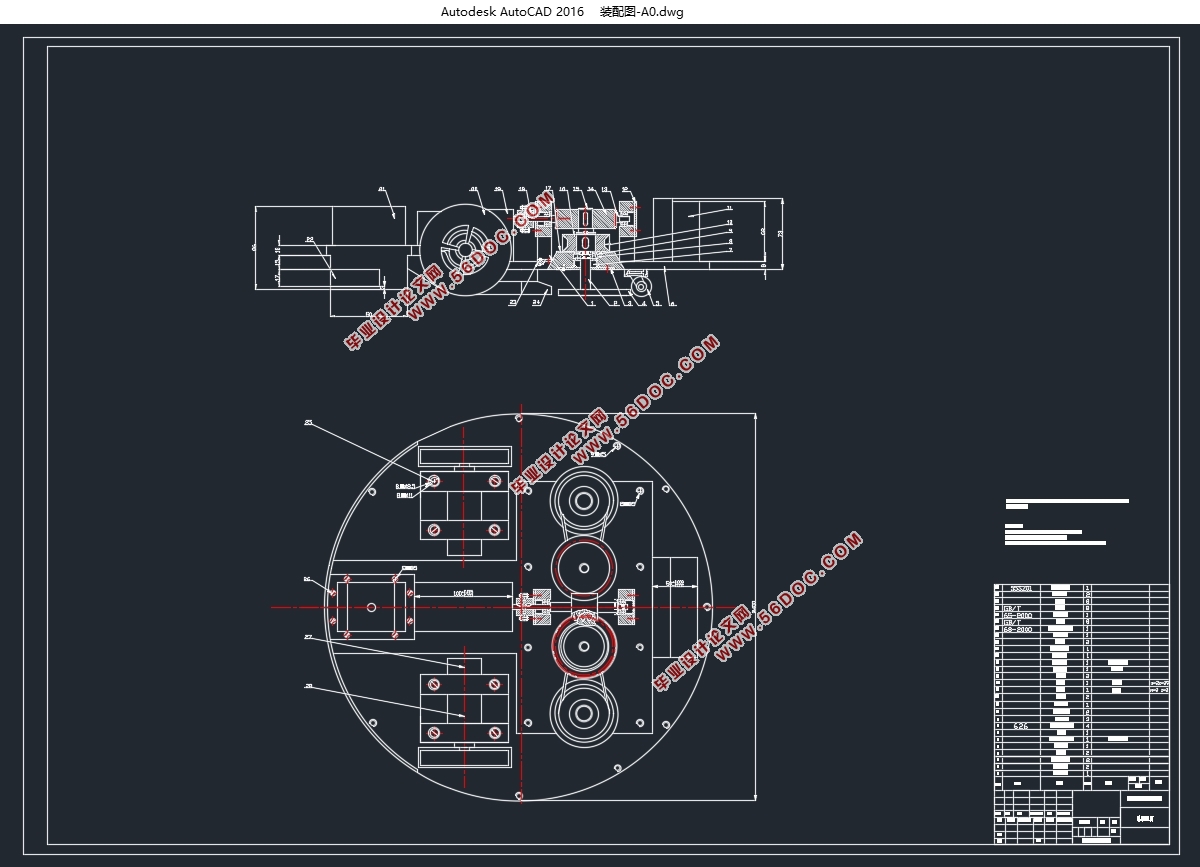
4. ЧхНрЛњЦїШЫЕФЛњаЕЩшМЦ 15
4.1 ЛњаЕНсЙЙзщГЩКЭЙЄзїдРэ 15
4.2 ЧхНрЛњЦїШЫзмЬхЩшМЦ 17
4.2.1 ЛњЦїШЫЭтаЮЩшМЦ 17
4.2.2 ЛњЦїШЫЕФаазпЛњЙЙЩшМЦ 18
4.2.3 ЧхЩЈЛњЙЙЕФЩшМЦ 18
4.2.4 ЮќГОЛњЙЙЩшМЦ 20
4.2.5 РЌЛјЪеМЏДІРэЛњЙЙЩшМЦ 21
5. гВМўЩшМЦ 24
5.1 ЕчТЗЩшМЦЗНАИ 24
5.2 зюаЁЯЕЭГЕчТЗЩшМЦ 25
5.3 ЗНЯђЧ§ЖЏЕчТЗЩшМЦ 26
5.4 ЧхЩЈЕчЛњКЭЮќГОЕчЛњЧ§ЖЏЕчТЗЩшМЦ 27
5.5 БмеЯЕчТЗЩшМЦ 28
5.6 ЮТЖШВЩМЏЕчТЗЩшМЦ 29
5.7 ЯдЪОЕчТЗЩшМЦ 30
5.8 АДМќЕчТЗЩшМЦ 30
5.9 ЩљЙтБЈОЏЕчТЗЩшМЦ 31
6. ШэМўЩшМЦ 32
6.1 змЩшМЦЫМТЗ 32
6.2 жїГЬађЩшМЦ 32
6.3 БмеЯзгГЬађЩшМЦ 33
6.4 ЧхЩЈЕчЛњПижЦзгГЬађЩшМЦ 34
6.5 ЮТЖШВЩМЏзгГЬађЩшМЦ 35
6.6 ЮТЖШЯдЪОБЈОЏзгГЬађЩшМЦ 36
6.7 АДМќзгГЬађЩшМЦ 37
7. ОпЬхМЦЫу 39
7.1 аазпЕчЛњбЁдё 39
7.2 ЮЯТжЮЯИЫЕФбЁдё 40
7.3 ЧхЩЈЛњЙЙЕФЕчЛњЕФбЁдё 43
7.4 МвЭЅЧхНрЛњЦїШЫЕчГиЕФбЁгУ 43
7.5 ЧхЩЈЛњЙЙжаЮЯИЫЩЯжсГаЕФЪйУќЕФМЦЫу 44
7.6 ЧхЩЈЛњЙЙжаЮаТжжсЕФаЃКЫ 46
8. ЯЕЭГЕїЪд 48
8.1 ГЬађЕїЪд 48
8.2 ЗТецЕїЪд 50
8.3 ЮЪЬтзмНсЗжЮі 53
9. змНсгыеЙЭћ 54
9.1 змНс 54
9.2 еЙЭћ 54
ИНТМ 56
ВЮПМЮФЯз 68
ЭтЮФЮФЯз 70
жаЮФЗвы 78
жТЁЁаЛ 84
|
