ЛљгкSTM32ЕФСНТжздЦНКтаЁГЕ
РДдДЃК56doc.com зЪСЯБрКХЃК5D27072 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D27072
зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
ЛљгкSTM32ЕФСНТжздЦНКтаЁГЕ(ТлЮФ12800зж)
еЊвЊ
ЫцзХПЦбЇММЪѕЕФНјВНЃЌНЛЭЈЙЄОпе§ж№НЅГЏзХЛЗБЃЁЂНкФмЁЂгщРжЁЂБуНнадЕФЗНЯђЗЂеЙЃЌЖјздЦНКтГЕвђЦфТЬЩЋЛЗБЃЧвБугкГіааЃЌЪмЕНСЫШЫУЧдНРДдНЖрЕФЙизЂЁЃ
БОЮФОЭДЫЬсГіСЫвЛИівдSTM32ЮЊжїПиаОЦЌЕФЫЋТжЦНКтГЕЕФПижЦЯЕЭГЗНАИЁЃЮвЩшМЦЕФСНТжГЕЪЧзѓгвЖдГЦЃЌздШЛзДЬЌЯТЪЧВЛФмжБСЂЕФЃЌашвЊЭЈЙ§БрГЬЛёШЁзЫЬЌаХЯЂЃЌдйЭЈЙ§ЯрЙиЙЋЪНМАЫЋБеЛЗЕФПижЦЫуЗЈЕУЕНPWMТіВЈЪфГіЃЌвдДЫПижЦЕчЛњЪЕЯжЦНКтЁЃЦНКтГЕЕФКЫаФПижЦЦїВЩгУSTM32ЃЌЫќКЭжБСїЕчЛњЧ§ЖЏФЃПщЁЂЕчдДФЃПщЁЂзЫЬЌМьВтФЃПщКЭвЃПиЕШФЃПщзщГЩећИігВМўЯЕЭГЁЃЦНКтГЕШэМўЯЕЭГжївЊЪЕЯжЖдИїДЋИаЦїЕФЪ§ОнВЩМЏКЭШкКЯТЫВЈЃЌВЩгУЫЋБеЛЗPIDПижЦЫуЗЈЪЕЯжЖдГЕСОжБСЂзДЬЌЕФЮЌГжКЭдЫааЫйЖШЕФЪЕЪБПижЦЃЌЪЕЯжГЕЬхЕФЦНКтЁЃ
ВтЪдНсЙћБэУїЃЌБОЮФЩшМЦЕФПижЦЯЕЭГДяЕНСЫПЊЪМЕФдЄЦквЊЧѓЃЌдйИљОнЕїЪдЕФЧщПіЖдВЮЪ§зіСЫИФЩЦЃЌЛљБОДяЕНзюжеЕФЩшМЦвЊЧѓЁЃ
ЙиМќДЪЃКЫЋТжЦНКтГЕПижЦЯЕЭГ STM32 MPU6050 PIDЫуЗЈ
Abstract
With the advance of science and technology, transport is stepping towards energy conservation, environmental protection, convenient and entertaining direction. Since the first balancing robot Segway was inventedЃЌbecause of the environmental protection and convenience of the balancing carЃЌit has been of great concern more and more.
this article mainly introduces the balance of the two-wheeled balancing vehicle control system design scheme. the structure of two-wheelers are arranged symmetrically, it can’t remain upright in the natural state. So it’s required to get information of posture through programming, and then output PWM pulse width through the double-loop control algorithm and correlation equation to adjust the output control of the motor rotion and speed, thus the two-wheelers could be balanced. the STM32 is the core controller, on the basis of interface circuit board of increasing the hardware system, including DC motor control module, power management module, the attitude angle feedback module, man-machine interaction module. The balancing-car software system is to get each sensor data and fusion filtering, and achieving the state of the upright vehicle and maintain real-time control speed through dual closed-loop PID control algorithm, finally it could be balanced.
Testing results show that the designing control system achieve basic requirments. then according to results of debugging, the situation of the whole system has be modified, finally it meet the design requirements.
Key WordsЃКControl system of two-wheeled vehicle;STM32;MPU6050;PID control algorith
ФПТМ
еЊвЊ I
Abstract II
ЕквЛеТ аїТл 1
1.1 ЦНКтГЕИХЪі 1
1.2 ЙњФкЭтЖдСНТжЦНКтГЕЕФбаОПЯжзД 1
1.3 ПЮЬтЕФбаОПФкШнгыФПЕФ 2
1.4 ЯТЮФеТНкНсЙЙ 3
ЕкЖўеТ ЦНКтГЕЕФЦНКтдРэ 4
2.1 СНТжЦНКтГЕШЮЮёЗжНт 4
2.2 аЁГЕЦНКтПижЦ 4
2.3 БОеТаЁНс 5
ЕкШ§еТ ЦНКтГЕПижЦЯЕЭГгВМўЩшМЦ 6
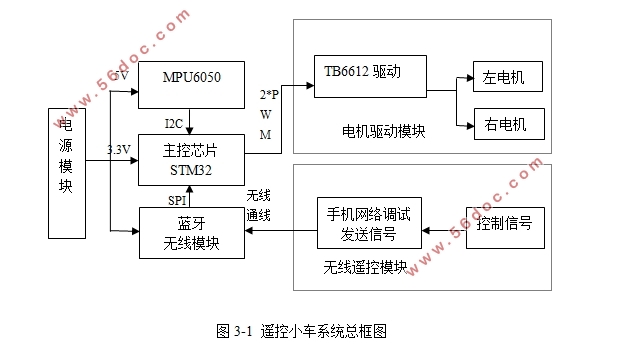
3.1 ПижЦЯЕЭГгВМўзмЬхЩшМЦЗНАИ 6
3.2 MPU6050ФЃПщЩшМЦ 7
3.2.1 MPU6050аОЦЌ 7
3.2.2 MPU6050ЕФгВМўЩшМЦ 7
3.3 ЕчЛњМАЦфЧ§ЖЏФЃПщ 8
3.3.1 ЕчЛњМАЩЯУцЕФБрТыЦї 8
3.3.2 ЕчЛњЧ§ЖЏаОЦЌгВМўЩшМЦ 9
3.4 ЕчдДФЃПщЩшМЦ 10
3.5 жїПижЦЦїSTM32F103ZE 11
3.5.1 STM32МђНщ 12
3.5.2 STM32ДЎПкВЮЪ§ЗжЮігыЩшМЦ 13
3.5.3 STM32жаЖЯВЮЪ§ЗжЮігыЩшМЦ 14
3.6 РЖбРФЃПщЩшМЦ 15
3.7 БОеТаЁНк 16
ЕкЫФеТ ЦНКтГЕПижЦЯЕЭГШэМўЩшМЦ 17
4.1 ПижЦЯЕЭГШэМўзмЬхЩшМЦЗНАИ 17
4.2 ФЃПщГѕЪМЛЏМАВПЗжГЬађЯъНт 18
4.2.1 GPIOПкЕФГѕЪМЛЏ 18
4.2.2 ДЎПкЕФГѕЪМЛЏ 18
4.2.3 I2CГѕЪМЛЏ 19
4.2.4 MPU6050ЕФГѕЪМЛЏ 21
4.2.5 MPU6050-DMPЪ§зждЫЫуДІРэ 22
4.3 ПижЦЫуЗЈЩшМЦ 22
4.3.1 зЫЬЌНЧПижЦ 23
4.3.2 ЫйЖШПижЦ 23
4.3.3 PIDВЮЪ§ећЖЈВНжш 24
4.4 БОеТаЁНк 24
ЕкЮхеТ ЫЋТжЦНКтаЁГЕЕФЯЕЭГЕїЪд 25
5.1 ЩЯЮЛЛњМАзЫЬЌДЋИаЦїЕїЪд 25
5.2 жБСЂПижЦЕїЪд 27
5.3 ЫйЖШПижЦЕїЪд 27
5.4 ЗНЯђПижЦЕїЪд 28
5.5 БОеТаЁНк 28
ВЮПМЮФЯз 29
жТаЛ 30
|
