纯电动汽车分布式轮毂驱动单元结构设计(含CAD图,CATIA三维图)(任务书,开题报告,外文翻译,文献摘要,论文说明书15000字,CAD图9张,CATIA三维图,答辩PPT)
摘要
分布式驱动电动汽车具有结构简单紧凑、传动系统高效节能、驱动和制动转矩独立可控等多个方面的独特优势,代表着下一代电动汽车发展的重要方向。
在本文的设计研究中,针对对象是一款具有四轮分布式驱动的越野车,主要设计任务是其轮毂驱动单元的结构。通过借鉴关于轮毂电机或轮边电机车辆发展的概述的文献,本文对该轮毂驱动单元进行从电机的选型到减速器的设计,完成整个轮毂驱动单元的从电机到车轮轮毂的动力传动的动力匹配和模型的搭建。
在该论文中,主要做的研究内容包括以下几个方面:
首先,明确该越野车与动力性有关整车技术参数,根据设计要求初步选定轮毂驱动单元的传动比,完成电机的选型,并对整车动力性进行计算。
其次,根据该轮毂驱动单元的工作要求,进行了行星齿轮减速器的参数设计计算,确定该减速器的所有部件的参数,并且完成所有齿轮副的强度校核,利用CATIA软件对从电机到车轮轮毂完整模型的建立与装配。
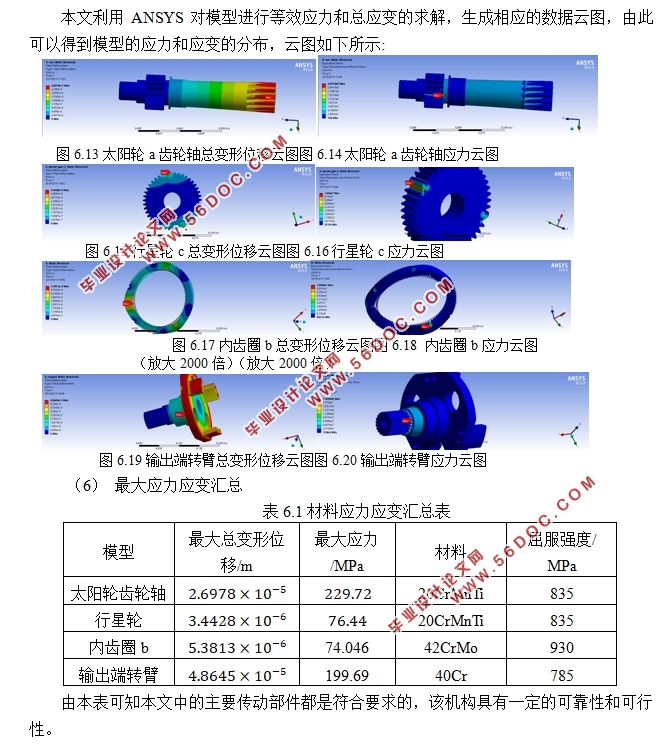
最后,利用ANSYS软件对轮毂驱动单元的核心部件进行力学仿真分析,评估设计的可行性和合理性。
通过本文的分析研究,完整的设计一种越野车的轮毂驱动单元的机构,并验证该机构符合强度和动力性的要求。
关键词:轮毂驱动单元;动力匹配;行星减速器;应力分析
Abstract
The hub motor or wheel-side motor-driven electric vehicle has the unique advantages of simple and compact structure, high efficiency and energy saving of the transmission system, independent controllable driving and braking torque. Itrepresents an important direction for the development of the next generation electric vehicle.
In the design study of this paper, the object is an off-road vehicle with four-wheel distributed drive. The main design task is the structure of its hub drive unit. By referring to the literature on the development of wheel hub motors or wheel-side motor vehicles, this paper designs the hub drive unit from the selection of the motor to the design of the reducer, and completes the power transmission from the motor to the wheel hub of the entire hub drive unit Matching and model building.
In this paper, the main research contents include the following aspects:
Firstly, the technical parameters of the off-road vehicle and the power-related vehicle are clarified. According to the design requirements, the transmission ratio of the hub drive unit is initially selected, the selection of the motor is completed, and the power of the vehicle is calculated.
Secondly, according to the working requirements of the hub drive unit, the parameter design calculation of the planetary gear reducer is carried out, the parameters of all the components of the reducer are determined, and the strength check of all gear pairs is completed, and the CATIA software is used to complete the establishment and assembly of a complete model from the motor to the wheel.
Finally, the ANSYS software is used to analyze the mechanical components of the core components of the hub drive unit to evaluate the feasibility and rationality of the design.
Through the analysis and research in this paper, the mechanism of the hub drive unit of an off-road vehicle is completely designed, and the mechanism is verified to meet the requirements of strength and power.
KeyWords:Hub drive unit;Dynamic matching;Planetary reducer;Stress Analysis
本文研究内容
本文针对一款具有四轮分布式驱动的越野车,结合该越野汽车的主要性能参数,对其轮毂驱动单元进行结构设计。并且使该越野车具有良好的动力学性能,满足其基本工作要求。
结合本文的设计任务要求,主要研究内容包括以下几点:
(1)越野车的动力性匹配。根据毕业设计任务书中提供的该越野车的部分整车参数以及动力性要求,选择合适的电机,制定合适的传动比,对整车的动力性进行合理的评估。
(2)行星齿轮减速器设计与校核计算。根据选定的传动比,选择合适额行星齿轮减速器的形式,进行减速器完整的参数计算。然后根据减速器设计尺寸完成三维模型的搭建以及从电机到轮毂的动力传动模型的搭建。
(3)传动部分的有限元仿真分析。通过仿真软件,对该越野车的轮毂驱动单元的一些重要传动部件进行受力分析,验证该轮毂驱动单元的合理性和可行性。
2.1 整车参数
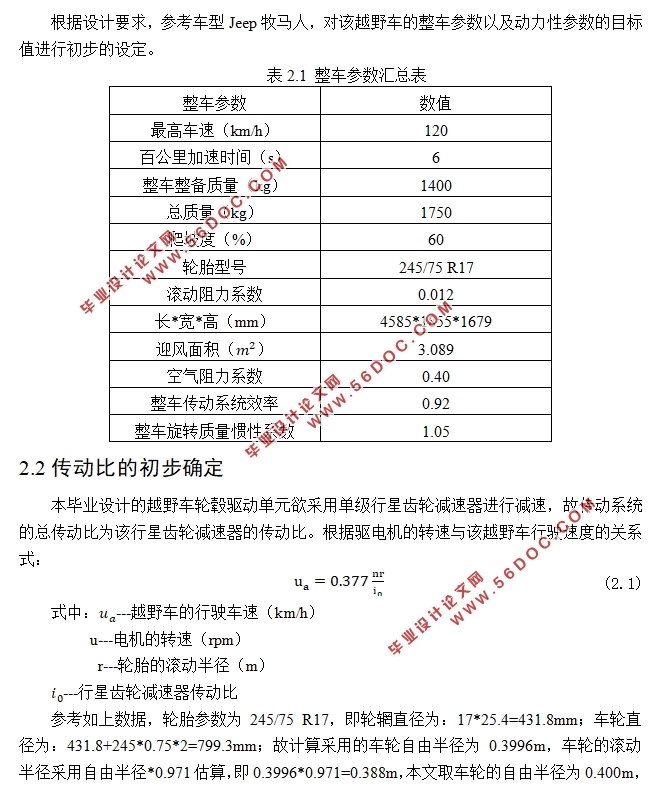
根据设计要求,参考车型Jeep牧马人,对该越野车的整车参数以及动力性参数的目标值进行初步的设定。
表2.1 整车参数汇总表
整车参数 数值
最高车速(km/h) 120
百公里加速时间(s) 6
整车整备质量(kg) 1400
总质量(kg) 1750
爬坡度(%) 60
轮胎型号 245/75 R17
滚动阻力系数 0.012
长*宽*高(mm) 4585*1855*1679
迎风面积(m^2) 3.089
空气阻力系数 0.40
整车传动系统效率 0.92
整车旋转质量惯性系数 1.05


目 录
第1章绪论 1
1.1 研究的背景与意义 1
1.2 国内外的研究现状 1
1.3 本文研究内容 1
第2章传动比的初步确定 3
2.1 整车参数 3
2.2传动比的初步确定 3
2.3本章小结 4
第3章电机参数的确定 5
3.1 计算电机额定功率和额定转矩 5
3.2计算电机峰值功率和峰值转矩 6
3.3选择合适的电机 7
3.4本章小结 9
第4章轮毂驱动单元主要参数验算 10
4.1最大爬坡度的验算 10
4.2最小传动比的验算 13
4.3本章小结 13
第5章行星齿轮参数的确定 14
5.1行星齿轮设计初始条件 14
5.2减速器设计计算 14
5.2.1 行星齿轮传动类型和传动简图的选取 14
5.2.2 配齿计算 14
5.2.3 齿轮主要参数的初步计算 15
5.2.4 啮合参数计算 16
5.2.5 几何尺寸的计算 17
5.2.6 装配条件的验算 18
5..3 减速器的分析与校核 19
5.3.1 传动效率的计算 19
5.3.2 行星齿轮传动的转速分析 20
5.3.3 行星齿轮传动的受力分析 20
5.3.4 齿轮接触强度验算 23
5.3.5 齿根弯曲强度验算 27
5.4 减速器的结构设计 32
5.4.1 均载机构的确立 32
5.4.2 中心轮的结构及其支承结构 32
5.4.3 行星轮的结构及其支承结构 33
5.4.4 转臂的结构及其支承结构 34
5.4.5 机体的结构设计 35
5.4.6 减速器附件设计 35
5.5本章小结 35
第6章驱动单元各齿轮的静力有限元分析 36
6.1有限元分析 36
6.2本章小结 38
第7章总结与展望 39
7.1总结 39
7.2展望 39
参考文献 40
致谢 42
|