六轮越野无人车驱动系统和整车布置设计(含CAD零件图装配图,SolidWorks三维图)(任务书,开题报告,文献摘要,外文翻译,论文说明书19000字,CAD图6张,SolidWorks三维图)
摘 要
近年来,无人车技术高速发展,在民用、军事和科学研究方面都起着重要的作用。非道路条件下的汽车行驶,地面的阻力大、起伏变化快,这就对车辆的动力性能和悬架性能的要求极高。
驱动系统对电动汽车整车性能尤其是动力性能影响很大,它起着储存和转化能量的作用,在汽车行驶过程中,它将蓄电池中的电能转化为机械能供车辆的行驶,同时,当汽车快速制动时,它可以储存回收机械能转化为的电能。良好的动力性能同时可以解决车辆的行驶条件中的阻力和起伏变化问题。因此,提高驱动系统的效率,对于无人越野车的设计和生产都具有重要的意义。
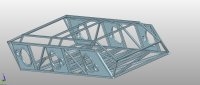
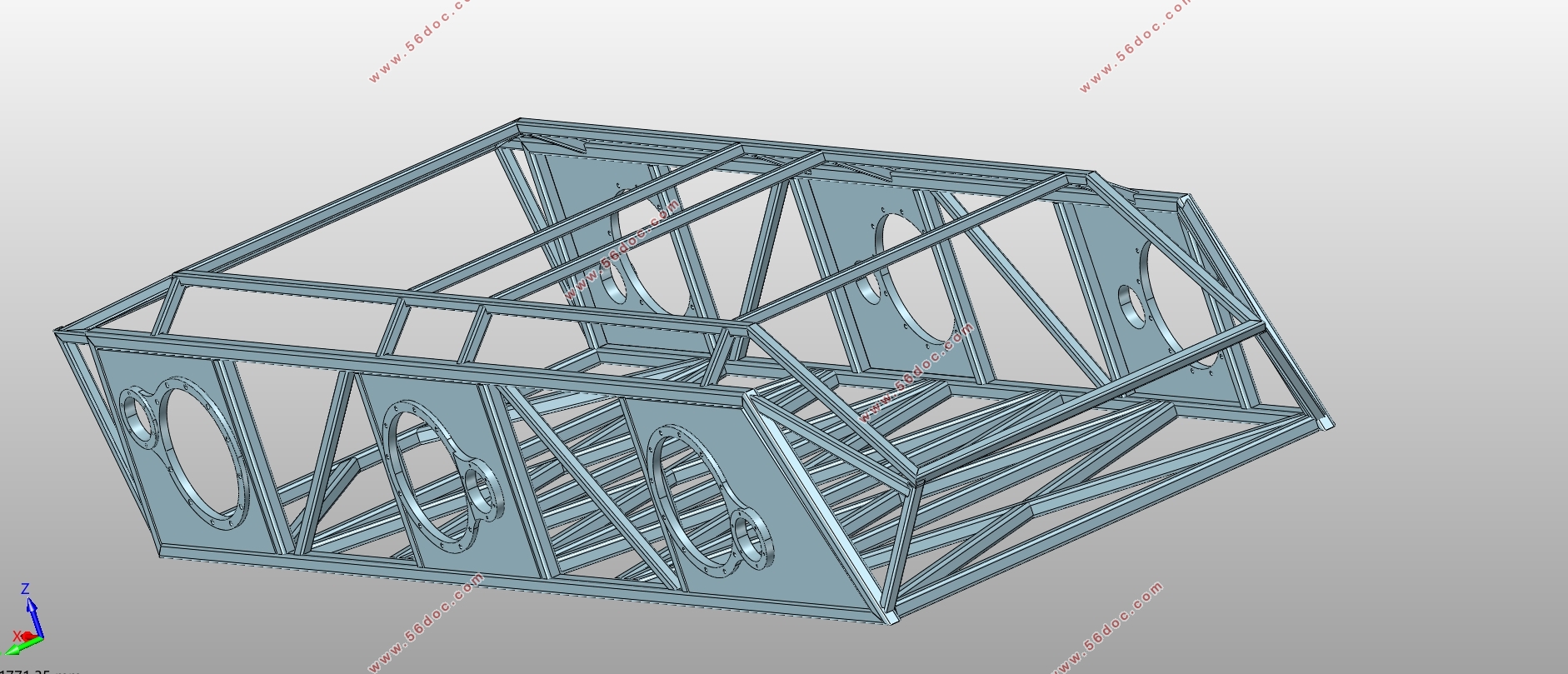
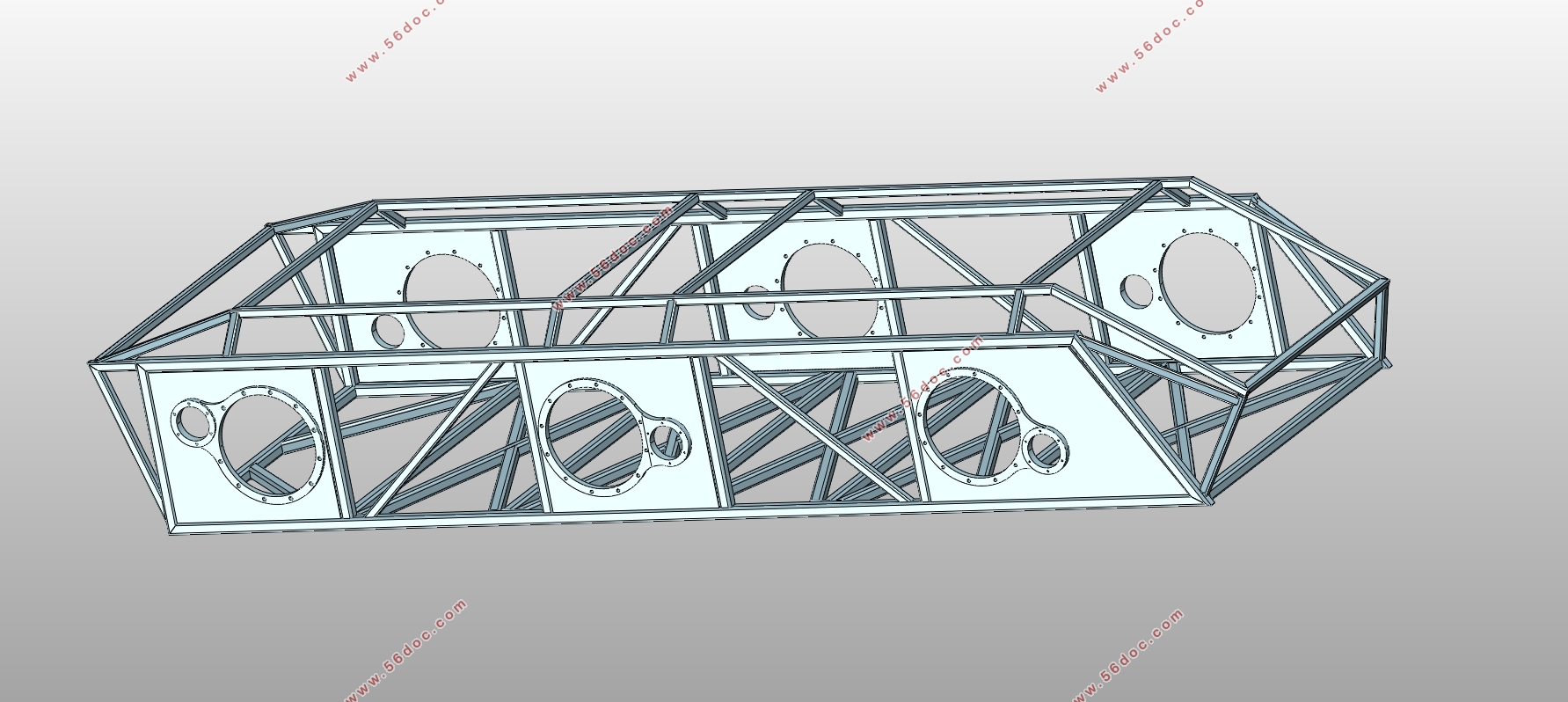
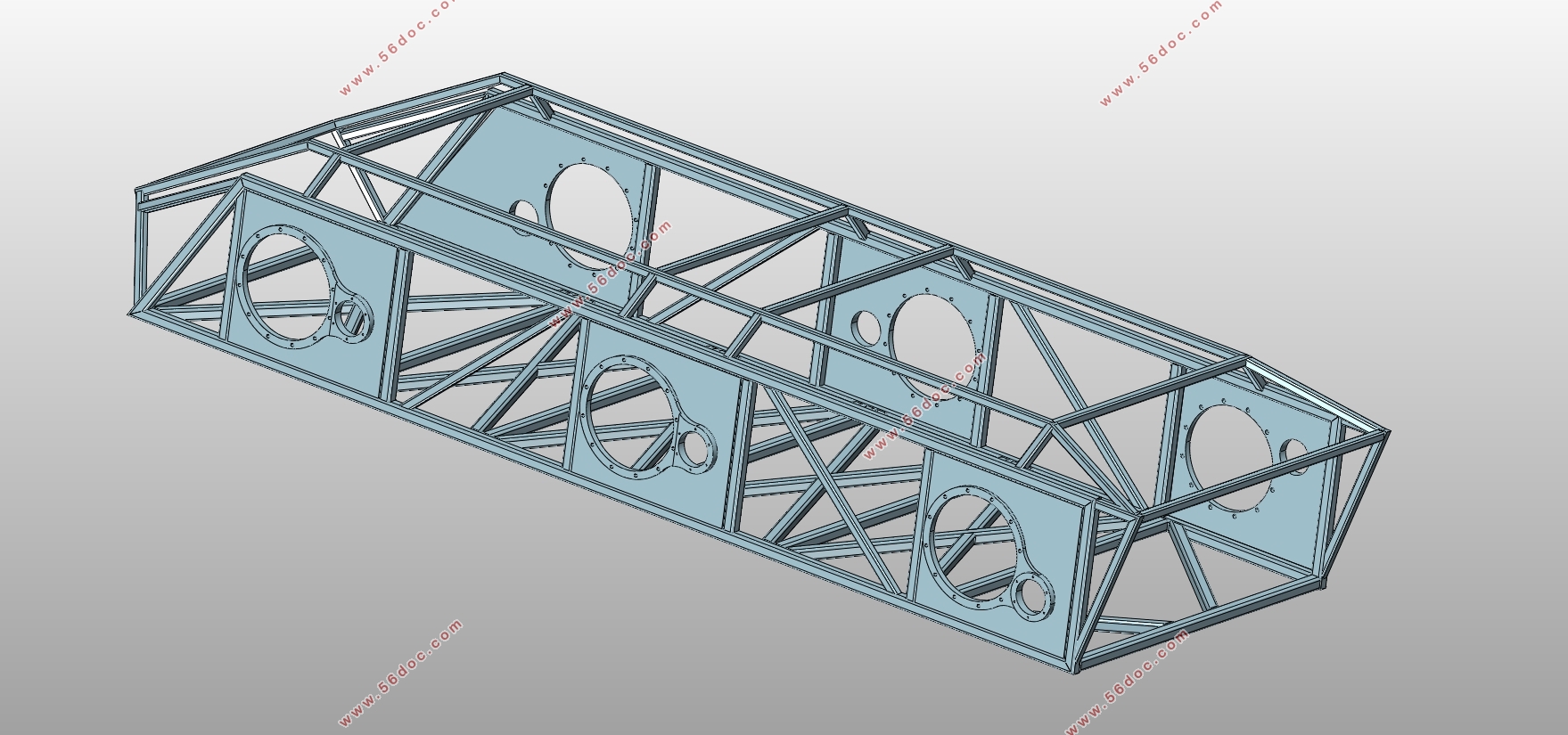
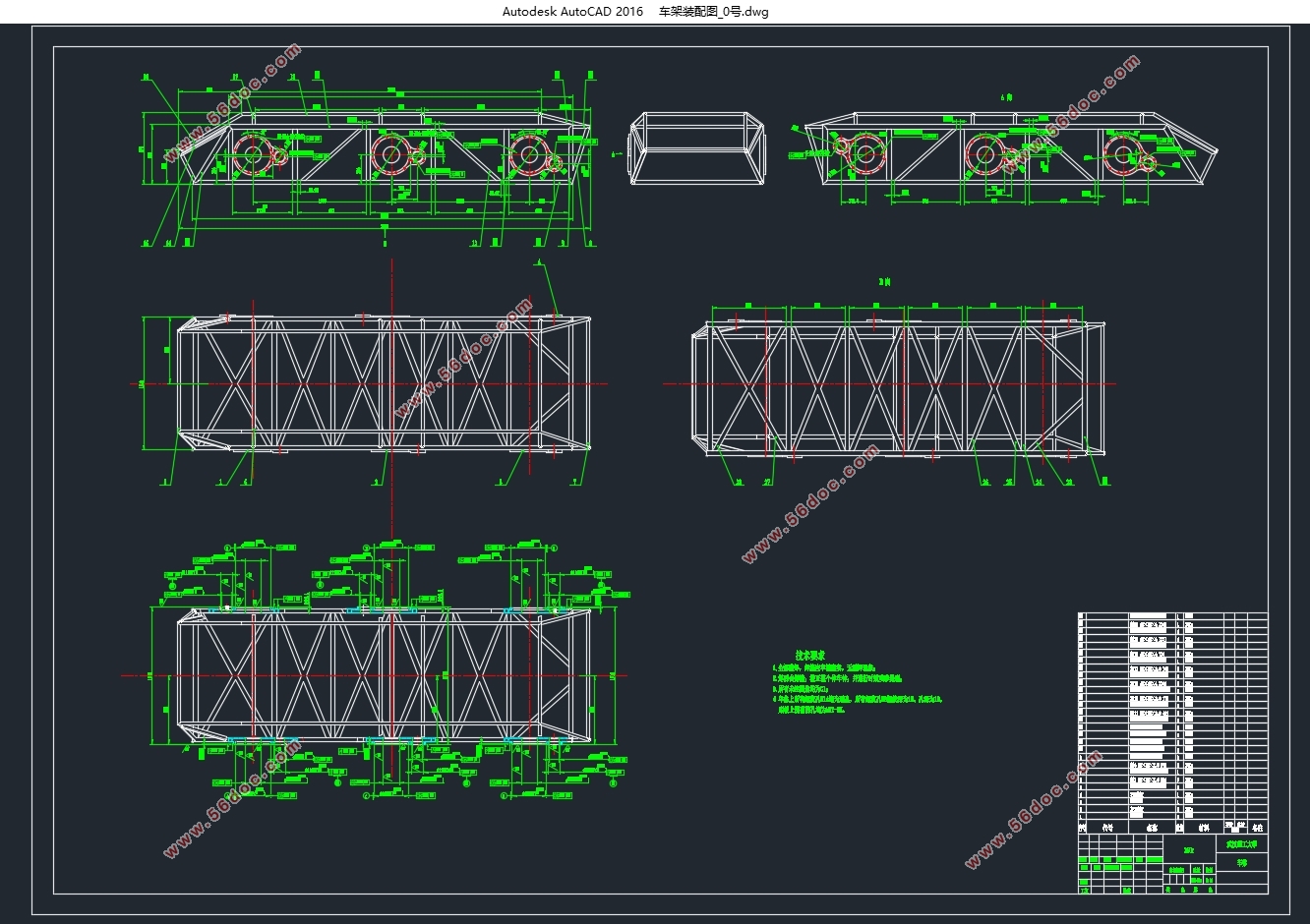
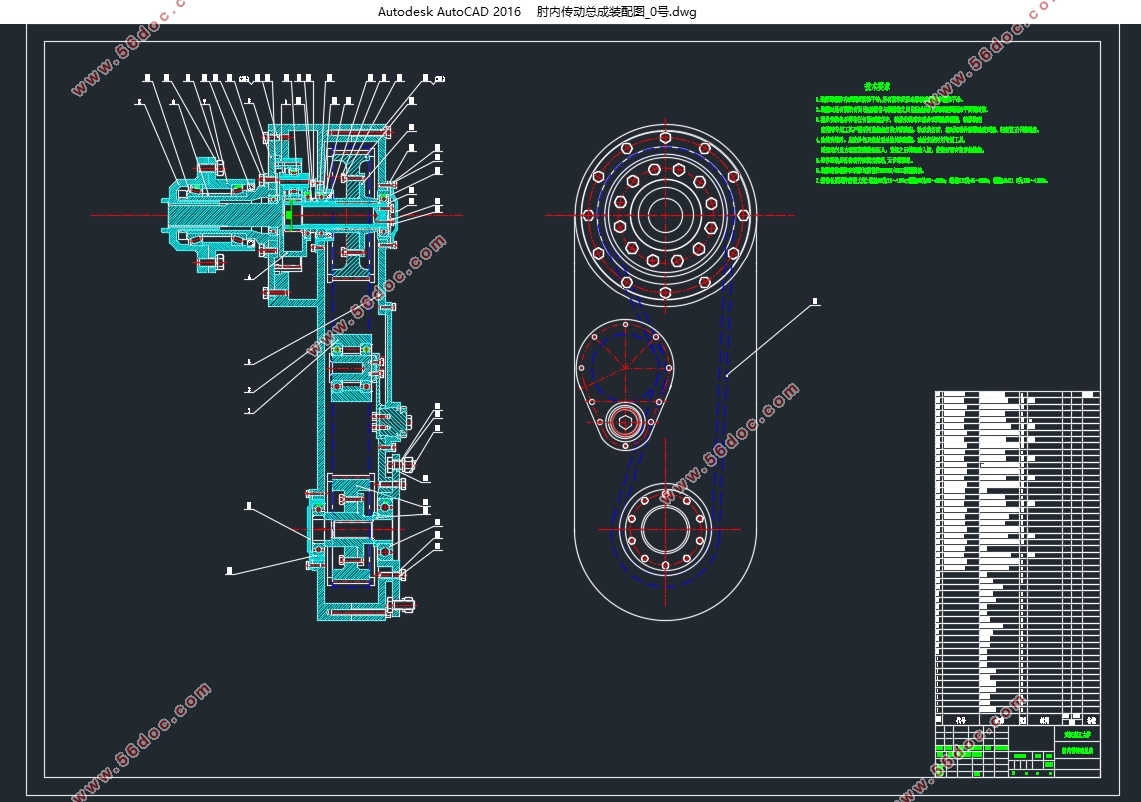
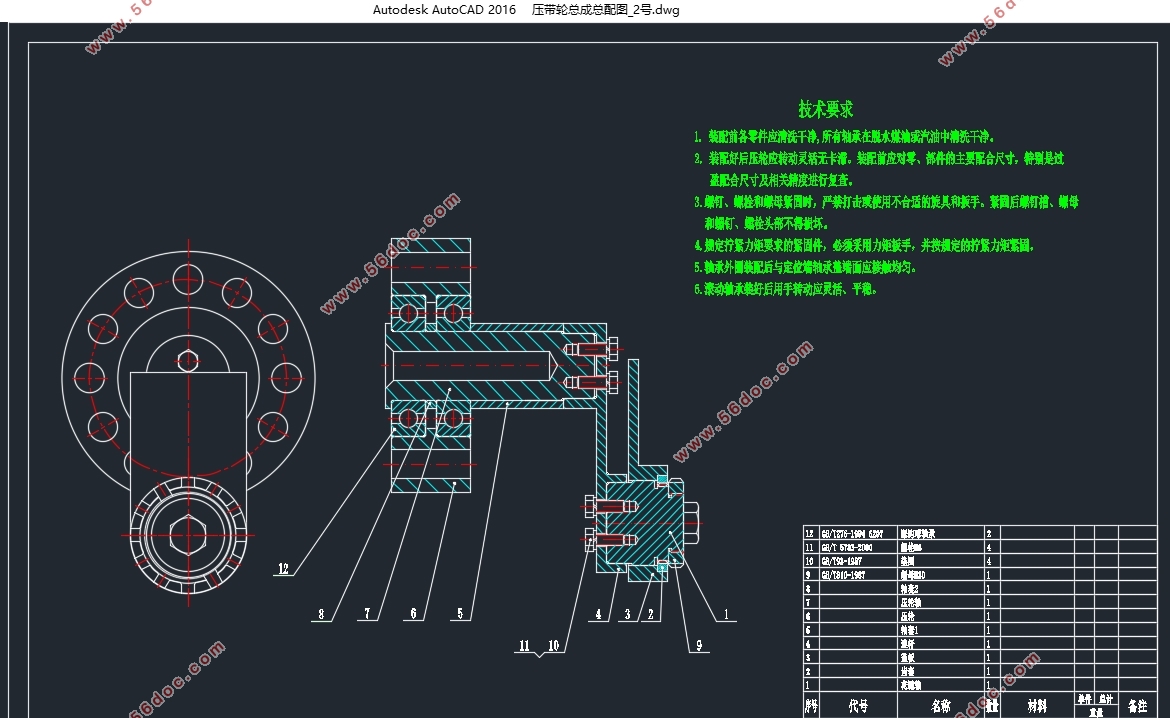
本文开展六轮越野无人车驱动系统和整车布置设计工作,将电驱动、肘内传动、带传动技术应用在越野无人车驱动系统,对驱动系统匹配合适的电机,设计一款符合经济性和动力性要求的驱动系统,在整车方面对车辆的制动系统和车身系统进行设计和布置,选择合适的车架材料,在各种极限工况下对车架进行有限元分析。
本次设计中驱动系统采用电控分布式驱动在实现转向的同时,能够实时回收制动 ,提高整车效率,同时采用速差转向提高了转向的灵活性。
关键词:无人越野车;驱动系统;肘内传动;整车布置
Abstract
In recent years, the rapid development of unmanned vehicle technology has played an important role in civil, military, and scientific research. Vehicles which are demanded on the vehicle's power performance and suspension performance are driving under non-road conditions have large resistance to ground and rapid fluctuations.
The drive system has a great influence on the performance of the electric vehicle, especially its dynamic performance. It plays a role of storing and transforming energy. During the running of the automobile, it converts the electric energy in the battery into mechanical energy for the vehicle to drive. At the same time, when the car When braking quickly, it can store the electrical energy converted to mechanical energy. Good dynamic performance can also solve the problem of resistance and fluctuations in the driving conditions of the vehicle. Therefore, improving the efficiency of the drive system has important implications for the design and production of unmanned SUVs
This paper develops six-wheeled off-road unmanned vehicle drive system and vehicle layout design work. It applies electric drive, elbow-in-wheel drive, and belt drive technology to off-road unmanned vehicle drive systems to match the drive system to the right motor to design an economical design. For the drive system with dynamic requirements, the vehicle's brake system and body system are designed and arranged in the entire vehicle, the appropriate frame material is selected, and the frame is subjected to finite element analysis under various extreme conditions.
In this design, the drive system adopts electronically-controlled distributed drive to realize the steering while at the same time, it can recover the brakes in real time and improve the efficiency of the entire vehicle. At the same time, the speed difference steering is used to improve the flexibility of steering.
Key Words: UGV; Drive System; In elbow drive;Vehicle la
本次设计的车辆为无人车,所以对其乘员的空间取消了设计。在车身设计中,车身的长宽高符合设计指标的要求,对于整车而言,长为4200mm,宽为1200mm,高为1100mm,
目 录
第1章 绪论 1
1.1 研究背景、目的和意义 1
1.2 国内外研究状况 1
1.3 研究内容 2
1.4 技术路线 2
1.5 设计指标 5
1.6 轮胎参数 5
第2章 驱动系统的设计与计算 6
2.1 驱动系统的总体设计 6
2.2 总传动比确定 7
2.2.1 设计原则 7
2.2.2 初选总传动比 7
2.2.3 实际传动比的计算 9
2.2.4 实际最大爬坡度 10
2.2.5 实际最高车速 10
2.3 车辆的动力性 11
2.3.1 加速性能 11
2.3.2 电机效率 16
2.4 传动计算的校核 17
2.4.1 电机减速器计算 17
2.4.2 轮边减速器计算 20
2.4.3 肘内带传动计算与校核 24
2.4.4 轴间带传动的计算与校核 25
2.5 速差转向 28
2.5.1 车辆直线行驶 28
2.5.2 任意方向行驶 29
2.5.3 中心转向 29
第3章 制动系统的设计与计算 30
3.1 制动系统的计算与选型 30
3.2 制动距离的计算 32
3.3 制动器热容量和温升校核计算 33
3.4 本章小结 33
第4章 车身系统的设计与计算 35
4.1 车架系统的总体设计 35
4.1.1 基本设计目标 35
4.1.2 车架结构方案的选择 35
4.1.3 车架的结构设计 38
4.2 车架的强度分析 41
4.2.1 有限元分析原理及前期准备 41
4.2.2 各类工况分析 47
4.3 本章小结 57
第5章 整车布置 58
5.1 整车尺寸 58
5.2 驱动系统的布置 58
5.3 整车质量 59
第6章 结论 60
参考文献 61
附录 63
附录A 63
附录B 64
附录C 65
致谢 66
|