ЮоШЫЮяСїГЕ(AGVаЁГЕ)ЩшМЦ(КЌCADСуМўЭМзАХфЭМ,SolidWorksШ§ЮЌЭМ)(ШЮЮёЪщ,ПЊЬтБЈИц,ЮФЯзеЊвЊ,ЭтЮФЗвы,ТлЮФЫЕУїЪщ15000зж,CADЭМжН12еХ,SolidWorksШ§ЮЌЭМ)
еЊ вЊ
ЪЕЬхОМУЖдвЛЙњОМУЕФЗЂеЙжСЙиживЊЃЌЭЌЪБжЦдьвЕгжЪЧЪЕЬхОМУЕФКЫаФВПЗжЃЌвђДЫШчКЮЬсИпЩњВњаЇТЪГЩЮЊСЫашвЊУмЧаЙизЂЕФЮЪЬтЁЃЮоШЫЮяСїГЕОпгажЧФмЛЏЁЂФмЙЛздЖЏЭъГЩЮяСїдЫЪфЕФгХЕуЃЌдкНќФъРДЗЂеЙбИЫйЁЃБОЮФЩшМЦСЫвЛИіМШФмТњзуЛљБОЕФздЖЏдЫЪфЛѕЮяЙІФмЃЌгжФмЙЛМѕЩйЙЄвЕдЫЪфжаЕФГЩБОВЂЬсЩ§дЫЪфЕФаЇТЪЕФAGVздЖЏв§ЕМаЁГЕЁЃЭЈЙ§SolidworksЩшМЦЛцжЦвЛПюAGVЮоШЫВцГЕЃЌВЂЖдЦфЮШЖЈадКЭНсЙЙЧПЖШНјаааЃКЫЁЃТлЮФжївЊЕФбаОПФкШнШчЯТЃКЃЈ1ЃЉЮоШЫЮяСїГЕЕФзмЬхЩшМЦЗНАИЃКЪзЯШЬсЧАжЦЖЈвЛИізмЬхЕФЩшМЦЗНАИЃЌзїЮЊНёКѓЩшМЦЕФЕМЯђКЭПђМмВЂдкДЫЛљДЁЩЯж№ВНЩюШыЭъЩЦЗНАИЃЛЃЈ2ЃЉЮоШЫЮяСїГЕЛњаЕЛњЙЙЕФЩшМЦгыМЦЫуЃКЭЈЙ§БШНЯЗжЮіШЗЖЈВцГЕЪНAGVЕФЛњаЕЛњЙЙЃЌЖдИїИіЛњЙЙНјааЗНАИбЁдёШЛКѓАИЭЈЙ§МЦЫуШЗЖЈКЯЪЪЕФГпДчВЮЪ§ЃЌВЂЖдЫљЩшМЦЕФЛњЙЙНјааЮШЖЈадЗжЮіШЗБЃТњзуЩшМЦвЊЧѓЃЛЃЈ3ЃЉЮоШЫЮяСїГЕЕФНЈФЃЃКдкЭъГЩСЫЛњЙЙЕФЩшМЦгыМЦЫужЎКѓЃЌЖдећЬхЕФВцГЕЪНAGVКЭИїИіЛњЙЙЕФСуВПМўдЫгУsolidworksЛцжЦГіРДЃЌНЈСЂвЛИіФЃаЭЃЌЮЊжЎКѓЕФгаЯодЊЗжЮіЬсЙЉФЃаЭЃЛЃЈ4ЃЉЮоШЫЮяСїГЕЕФЙиМќСуВПМўЧПЖШаЃКЫЃКЖдЩЯЪіЛцжЦЕФФЃаЭдЫгУAnsys workbenchНјаагаЯодЊЗжЮіЃЌЖдживЊСуВПМўЭъГЩОВгІСІЕФЗжЮіЃЌШЗБЃЦфТњзуЧПЖШИеЖШЕФвЊЧѓЁЃ
БОЮФЖдЫљЩшМЦаЁГЕНјааСЫЮШЖЈадЕФЗжЮіКЭЙиМќСуВПМўЧПЖШаЃКЫЃЌЫљЗжЮіЕФНсЙћБэУїЩшМЦЕФаЁГЕЗћКЯвЊЧѓЃЌФмЙЛе§ГЃЭъГЩЙЄзїЁЃ
ЙиМќДЪЃКЮоШЫЮяСїГЕЃЛВцГЕЃЛНсЙЙЮШЖЈадЃЛгаЯодЊЗжЮі
Abstract
The real economy is crucial to the development of a country's economy, and manufacturing is a core part of the real economy. Therefore, how to improve production efficiency has become a problem that needs close attention. Unmanned logistics vehicles have the advantages of being intelligent and capable of automatically completing logistics and transportation, and have developed rapidly in recent years. This paper designs an AGV automatic guided trolley that can meet the basic functions of automatic transport of goods, reduce the cost of industrial transportation and improve the efficiency of transportation.An AGV unmanned forklift was designed by Solidworks and its stability and structural strength were checked. The main research contents of the thesis are as follows: (1) The overall design scheme of the unmanned logistics vehicle: First, formulate an overall design plan in advance, as the guiding and framework of the future design, and gradually deepen the improvement plan based on this; (2) Design and calculation of the mechanical mechanism of the logistics vehicle: Determine the mechanical mechanism of the forklift AGV through comparative analysis, select the scheme for each mechanism and then determine the appropriate dimensional parameters through calculation, and analyze the stability of the designed mechanism to ensure that the design requirements are met. (3) Modeling of unmanned logistics vehicles: After completing the design and calculation of the organization, the overall forklift AGV and the components of each mechanism are drawn using solidworks to build a model for subsequent finite element analysis. Model; (4) Strength check of key components of unmanned logistics vehicles: The analytic model is applied to the model drawn above using Ansys workbench to analyze the static stress of important components to ensure that they meet the requirements of strength and stiffness.
In this paper, the stability analysis of the designed car and the strength check of thekey components are carried out. The analysis results show that the designed car meets the requirements and can complete the work normally.
Key words:AGV;Forklift;Structural stability;Finite element analysis
1.3баОПФкШн
ЃЈ1ЃЉЮоШЫЮяСїГЕЕФзмЬхЩшМЦЗНАИ
ЪзЯШЬсЧАжЦЖЈвЛИізмЬхЕФЩшМЦЗНАИЃЌзїЮЊНёКѓЩшМЦЕФЕМЯђКЭПђМмВЂдкДЫЛљДЁЩЯж№ВНЩюШыЭъЩЦЗНАИЁЃ
ЃЈ2ЃЉЮоШЫЮяСїГЕЛњаЕЛњЙЙЕФЩшМЦгыМЦЫу
ЭЈЙ§БШНЯЗжЮіШЗЖЈВцГЕЪНAGVЕФЛњаЕЛњЙЙЃЌЖдИїИіЛњЙЙНјааЗНАИбЁдёШЛКѓАИЭЈЙ§МЦЫуШЗЖЈКЯЪЪЕФГпДчВЮЪ§ЃЌВЂЖдЫљЩшМЦЕФЛњЙЙНјааЮШЖЈадЗжЮіШЗБЃТњзуЩшМЦвЊЧѓЁЃ
ЃЈ3ЃЉЮоШЫЮяСїГЕЕФНЈФЃ
дкЭъГЩСЫЛњЙЙЕФЩшМЦгыМЦЫужЎКѓЃЌЖдећЬхЕФВцГЕЪНAGVКЭИїИіЛњЙЙЕФСуВПМўдЫгУsolidworksЛцжЦГіРДЃЌНЈСЂвЛИіФЃаЭЃЌЮЊжЎКѓЕФгаЯодЊЗжЮіЬсЙЉФЃаЭЁЃ
ЃЈ4ЃЉЙиМќСуВПМўаЃКЫЧПЖШаЃКЫ
ЖдЩЯЪіЛцжЦЕФФЃаЭдЫгУAnsys workbenchНјаагаЯодЊЗжЮіЃЌЖдживЊСуВПМўЭъГЩОВгІСІЕФЗжЮіЃЌШЗБЃЦфТњзуЧПЖШИеЖШЕФвЊЧѓЁЃ
Ек2еТ AGVВцГЕЕФНсЙЙЩшМЦ
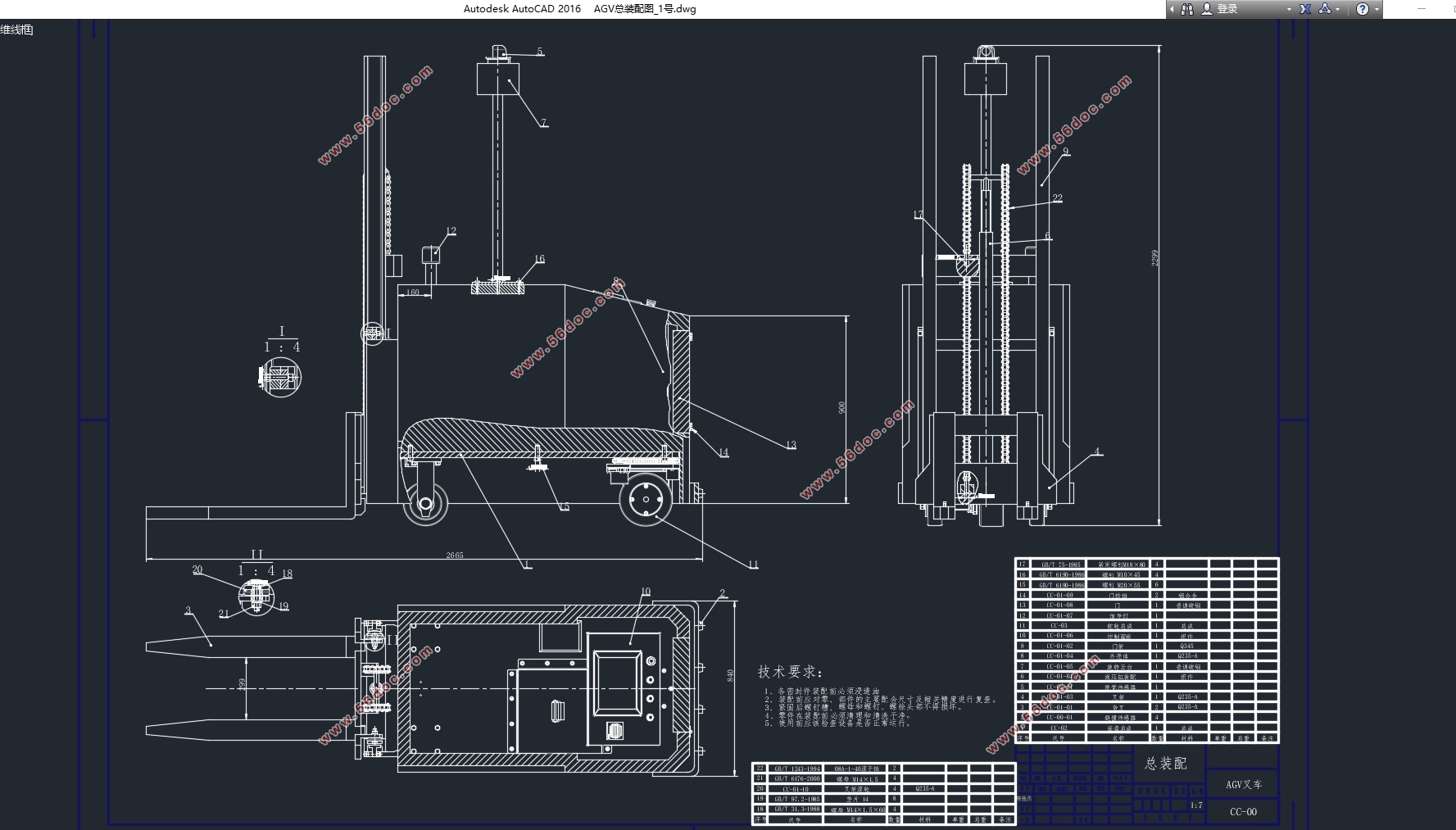
ЪзЯШЖдAGVаЁГЕЕФжївЊНсЙЙГпДчНјаавЛИіЩшЖЈЃЌЫљЩшМЦЕФAGVВцГЕЕФжївЊНсЙЙГпДчШчБэ2.1ЫљЪОЃК
Бэ2.1 AGVжївЊНсЙЙГпДч
ађКХ УћГЦ ВЮЪ§
1 ећГЕГЄЖШЃЈmmЃЉ 2665
2 ећГЕПэЖШЃЈmmЃЉ 840
3 ећГЕИпЖШЃЈmmЃЉ 2299
4 ОйЩ§ИпЖШЃЈmmЃЉ 70-1280
5 ааЪЛЫйЖШЃЈm/sЃЉ 1
6 ЛѕВцГЄЖШЃЈmmЃЉ 1000
7 ЖюЖЈдижиЃЈkgЃЉ 1000
8 ећГЕзджиЃЈkgЃЉ 1000

ФП ТМ
Ек1еТ аїТл 1
1.1баОПБГОАЁЂвтвхгыФПЕФ 1
1.1.1баОПБГОА 1
1.1.2баОПвтвх 1
1.1.3баОПФПЕФ 1
1.2ЙњФкЭтбаОПЯжзД 2
1.2.1ЙњЭтбаОПзДПі 2
1.2.2ЙњФкбаОПзДПі 3
1.3баОПФкШн 4
Ек2еТ AGVВцГЕЕФНсЙЙЩшМЦ 6
2.1змЬхЗНАИЕФЩшМЦ 6
2.2Ч§ЖЏзЊЯђЯЕЭГМАЕзХЬВПЗжЕФЩшМЦ 7
2.2.1Ч§ЖЏзЊЯђаЮЪНЕФбЁдё 7
2.2.2Ч§ЖЏзЊЯђЯЕЭГЕФЩшМЦМЦЫу 8
2.2.3ЕзХЬВПЗжЕФЩшМЦ 11
2.3ОйЩ§ЛњЙЙЕФЩшМЦ 13
2.3.1ОйЩ§ЛњЙЙЕФЩшМЦ 13
2.3.2ЛѕВцЕФЩшМЦ 14
2.3.3ВцМмЕФЩшМЦ 15
2.4ЦфЫћЛњЙЙЕФЩшМЦ 16
2.4.1 ЭтПЧЬхВПЗжЕФЩшМЦ 16
2.4.2 ЪгОѕДЋИаЦїЕФЩшМЦ 17
2.4.4ВйзїЦНЬЈЕФЩшМЦ 17
2.4.3 AGVећЬхФЃаЭ 18
2.5БОеТаЁНс 18
Ек3еТ AGVаЁГЕЕФЮШЖЈадЗжЮі 19
3.1 AGVВцГЕЕФзнЯђОВЮШЖЈад 20
3.2 AGVВцГЕЕФзнЯђЖЏЮШЖЈад 21
3.3 AGVВцГЕЕФКсЯђОВЮШЖЈад 22
3.4 AGVВцГЕЕФКсЯђЖЏЮШЖЈад 24
3.5БОеТаЁНс 25
Ек4еТ AGVВцГЕЙиМќСуМўЧПЖШаЃКЫ 26
4.1ЛѕВцЕФЧПЖШаЃКЫ 26
4.2УХМмЕФЧПЖШаЃКЫ 29
4.3ЭтПЧЬхЕФЧПЖШаЃКЫ 32
4.4БОеТаЁНс 35
Ек5еТ змНсгыеЙЭћ 36
5.1змНс 36
5.2еЙЭћ 35
ВЮПМЮФЯз 37
жТаЛ 39
|