ЮоШЫМнЪЛжЧФмГЕзЊЯђЯЕЭГЩшМЦ(КЌCADСуМўЭМзАХфЭМ)(ТлЮФЫЕУїЪщ12000зж,CADЭМ5еХ)
еЊвЊ
ЫцзХЛЅСЊЭјММЪѕдкИїааИївЕХюВЊЗЂеЙЃЌЮоШЫМнЪЛММЪѕе§ГЩЮЊШЋЧђЖЅМтЩшМЦЪІЯывЊФУЯТЕФЙ№ЙкЁЃШЛЖјЃЌФПЧАЮоШЫМнЪЛММЪѕЕФбаОПгіЕНаэЖрЦПОБЃЌЮоШЫМнЪЛзЊЯђЯЕЭГЕФЩшМЦЪЧЦфжазюЙиМќЕФВПЗжжЎвЛЁЃ
БОЮФНщЩмСЫвЛИіЮоШЫМнЪЛжЧФмГЕЕФзЊЯђЯЕЭГЩшМЦЙ§ГЬЃЌетжжзЊЯђЯЕЭГЗжЮЊСНДѓПщЁЃЦфжаЃЌПижЦВПЗжЪЧРћгУДЋИаЦїЁЂЪ§ОнВЩМЏЯЕЭГКЭГЕдиЕчФдЭъГЩЕРТЗаХЯЂВЩМЏКЭОіВпЃЌВЂНЋжИСюЪфЫЭИјЛњаЕВйзнЛњЙЙЪЕЯжзджїзЊЯђЁЃЛњаЕВПЗжЪЧвдЕчЛњЮЊЖЏСІдДЃЌЭЈЙ§ГнТжДЋЖЏЃЌДјЖЏГнТжГнЬѕЪНзЊЯђЦїдЫзїЃЌЫцжЎДјЖЏзЊЯђжсЕШВйзнЛњЙЙзЊЖЏЁЃБОЮФЪзЯШЗжЮіСЫЙњФкЭтЮоШЫМнЪЛзЊЯђЯЕЭГЕФбаОПЯжзДЃЌИљОнЯрЙизЪСЯУїШЗСЫЩшМЦММЪѕТЗЯпЃЌШЛКѓОнДЫШЗЖЈСЫПижЦВПЗжЕФДѓЬхЗНАИЃЌОпЬхЩшМЦСЫзЊЯђЦїРраЭКЭМЦЫуСЫГнТжГнЬѕЕФОпЬхВЮЪ§ЁЂНјааСЫзЊЯђЬнаЮЕФЛљБОгХЛЏЁЂЭъГЩСЫВйзнЛњЙЙЗРЩЫКЭЕчЛњЩшМЦЕШЙЄзїЃЌзюКѓдквЛаЉБивЊЕФВПЗжЭъГЩСЫЯрЙиСуМўЕФгІСІаЃКЫЕШЙЄзїЁЃ
ЙиМќДЪЃКЮоШЫМнЪЛЃЛзЊЯђЯЕЭГЃЛГнТжГнЬѕЪНзЊЯђЦїЃЛзЊЯђЬнаЮгХЛЏ
Abstract
With the rapid development of Internet technology in all walks of life, driverless technology is becoming the crown of the world's top designers. However, the current research on driverless technology has encountered many bottlenecks, and the design of the driverless steering system is one of the most critical parts.
This paper introduces the steering system design process of an unmanned smart car, which is divided into two large blocks. Among them, the control part uses the sensor, the data acquisition system and the on-board computer to complete the road information collection and decision-making, and delivers the command to the mechanical control mechanism to realize the autonomous steering. The mechanical part is based on the motor as the power source. Through the gear transmission, the rack and pinion steering gear is driven to operate, and then the steering mechanism such as the steering shaft is driven to rotate. This paper first analyzes the research status of the unmanned steering system at home and abroad, and clarifies the design technical route based on the relevant data. Then, based on this, the general scheme of the control part is determined, and the steering gear type and the specific parameters of the rack and pinion are calculated. The basic optimization of the steering trapezoid was carried out, the anti-injury of the operating mechanism and the motor design were completed, and finally the stress check of the relevant parts was completed in some necessary parts.
Keywords: driverless; steering system; rack and pinion steering; steering trapezoidal optimization
зЊЯђЯЕЭГЯрЙиВЮЪ§ШЗЖЈ
ОЙ§ЧАЦкЕїбаЃЌБОЩшМЦећГЕВЮЪ§ЕФЕФФПБъГЕаЭМДЮЊБІПЅE200ЃЌЯрЙиВЮЪ§ШчБэ2.1ЫљЪОЃК
Бэ2.1БІПЅE200ећГЕЯрЙиВЮЪ§
ГпДчВЮЪ§ ГЄ/Пэ/Ип 2479mm/1526mm/1616mm
жсОр 1600mm
ЧАТжТжОр 1310mm
жЪСПВЮЪ§ ећБИжЪСП 842kg
ТњдижЪСП 1022kg
ЦфЫћПЩФмгАЯьзЊЯђЩшМЦВЮЪ§ Ч§ЖЏЗНЪН ЧАжУЧАЧ§
жњСІРраЭ ЕчЖЏжњСІ
ЧАаќМмРраЭ ТѓИЅбЗЪНЖРСЂаќМм
ЮЊСЫБЃжЄаЃКЫОпгаСМКУЕФЭЈЙ§адЃЌдкзюДѓзЊНЧЪБЕФзюаЁзЊЭфАыОЖЮЊжсОрЕФ2-2.5БЖЁЃИљОнећГЕЪ§ОнЃЌЩшМЦзЊЯђАыОЖЮЊR_min=3600mЃЌжїЯњМфОрЖЈЮЛK=825mmЃЌЧАТжТжОрB_1=1310mmЁЃ
гЩДЫЃЌПЩвРОнАЂПЫТќзЊНЧЙиЯЕЕУзЊЯђТжЭтТжзюДѓзЊНЧЮЊ
θ_0max=arctan L/(R_min-(B_1-K)/2)=25.48˚
зЊЯђТжФкТжзюДѓзЊНЧЮЊ
θ_1max=arccotЃЈcotθ_0max-K/LЃЉ=32.28˚
МДзЊЯђТжЭтТжзюДѓзЊНЧЮЊ25.48˚ЃЌФкТжзюДѓзЊНЧЮЊ32.28 ˚ЁЃ
ФПТМ
ЕквЛеТаїТл 1
1.1ЙњЭтбаОПЯжзДЗжЮі 1
1.2ЙњФкбаОПЯжзДЗжЮі 2
1.3баОПФПЕФМАвтвх 2
ЕкЖўеТзЊЯђЯЕЭГММЪѕЗНАИ 4
2.1зЊЯђЯЕЭГМђЪі 4
2.2ЮоШЫМнЪЛзЊЯђЯЕЭГЩшМЦЗНЗЈ 4
2.3зЊЯђЯЕЭГЯрЙиВЮЪ§ШЗЖЈ 4
2.4зЊЯђЯЕЭГММЪѕЗНАИбЁЖЈ 5
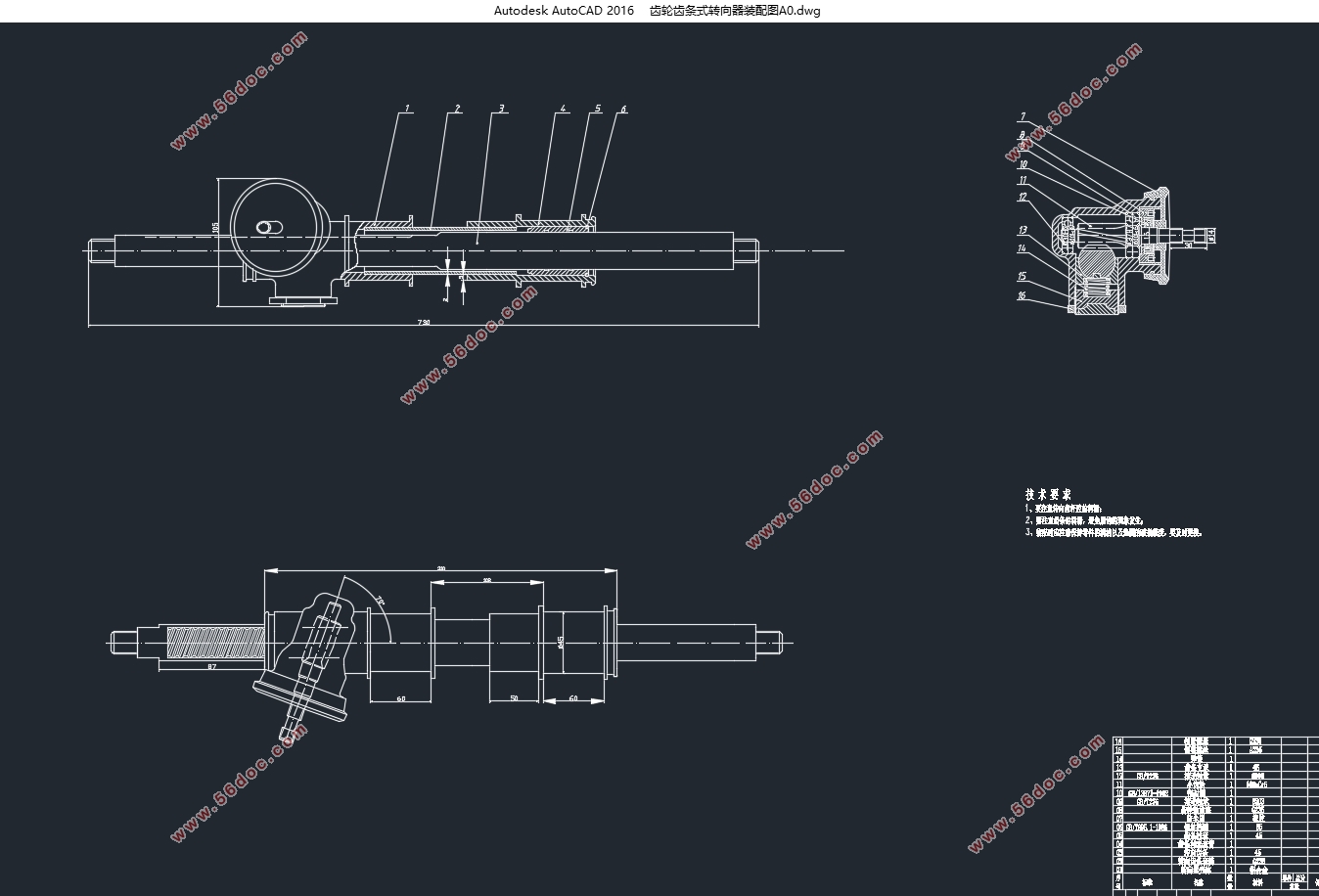
ЕкШ§еТзЊЯђЦїЕФЩшМЦ 7
3.1ШЗЖЈзЊЯђЦїРраЭ 7
3.2ГнТжГнЬѕзЊЯђЦїЛљБОЩшМЦ 8
3.2.1ЪфШыЪфГіаЮЪН 8
3.2.2ГнТжГнЬѕаЮЪНбЁдё 8
3.2.3ВМжУаЮЪН 9
3.3зЊЯђЦїОпЬхВЮЪ§ЩшМЦ 9
3.3.1зЊЯђЯЕЭГдиКЩКЭДЋЖЏБШМЦЫу 9
3.3.2ГнТжГнЬѕЛњЙЙЩшМЦвЊЧѓ 10
3.3.3ГнТжГнЬѕОпЬхВЮЪ§ЩшМЦ 11
3.3.4 зЊЯђЦїаЃКЫ 13
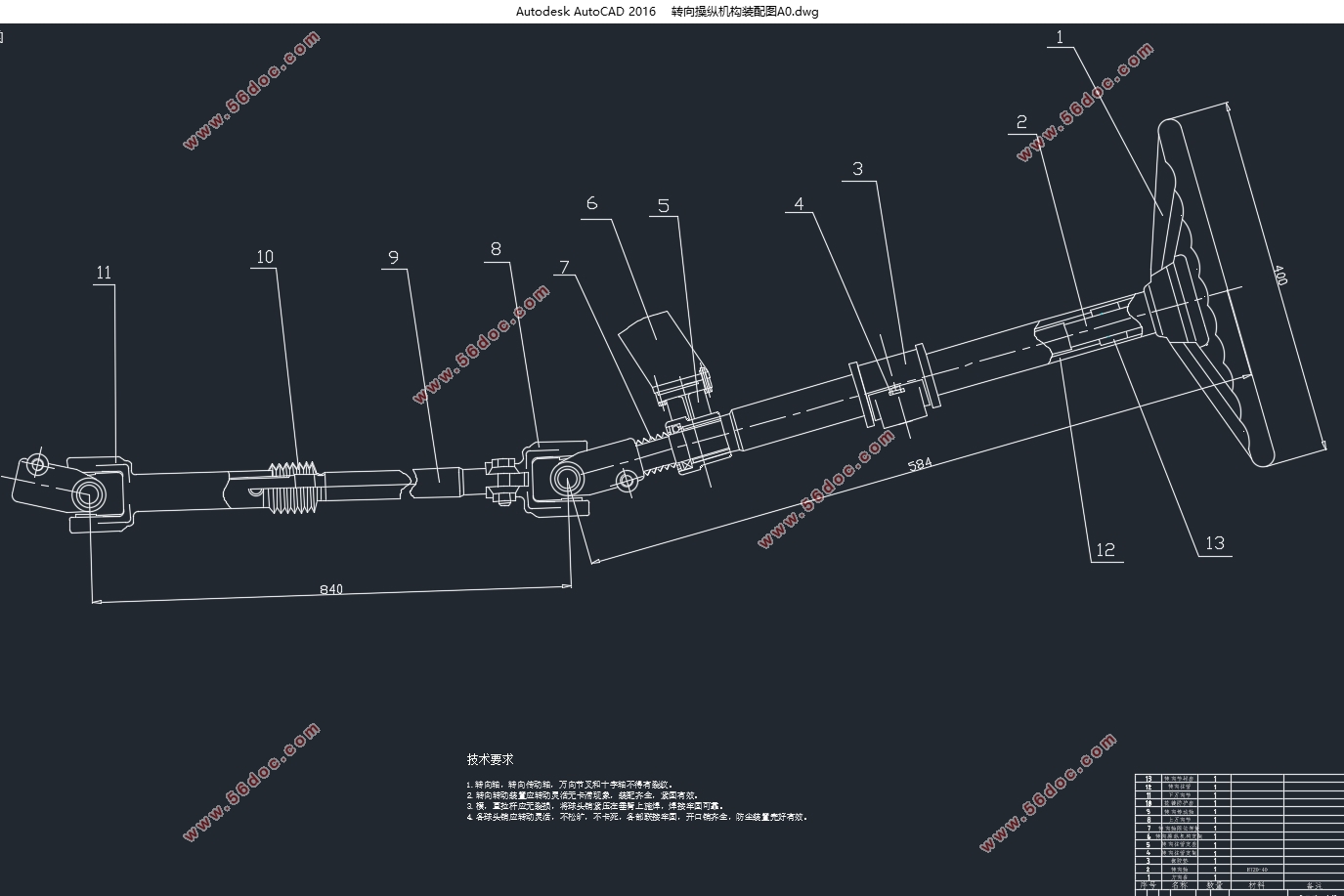
ЕкЫФеТзЊЯђДЋЖЏЛњЙЙ 15
4.1ИХЪі 15
4.2АЂПЫТќЬѕМў 15
4.3ШЗЖЈгХЛЏЕФФПБъКЏЪ§ 16
4.3.1дМЪјЬѕМў 17
4.3.2КЏЪ§гХЛЏНсЙћ 17
4.4зЊЯђДЋЖЏЛњЙЙВПМўЕФЩшМЦ 17
4.4.1ЧђЭЗЯњ 17
4.4.2зЊЯђКсРИЫ 18
ЕкЮхеТВйзнЛњЙЙ 19
ЕкСљеТЕчЛњМАЯрЙиМўЩшМЦ 20
6.1ЕчЛњВМжУЮЛжУ 20
6.2ЕчЛњбЁаЭ 20
6.3ЕчЛњГнТжВЮЪ§ 21
6.4ЗжРыЦїЩшМЦ 21
НсТл 23
ВЮПМЮФЯз 24
жТаЛ 25
|
