往复式切割器振动分析及结构优化(MATLAB)
来源:56doc.com 资料编号:5D11066 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D11066
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
往复式切割器振动分析及结构优化(选题审批表,任务书,开题报告,中期检查表,毕业论文14500字)
摘 要:为降低油菜联合收割机割台损失,对油菜联合收割机上往复式切割器传动机构进行了运动动力学分析,建立了该机构运动动力学模型,分析了各主要构件的运动加速度,得到了求解机构中各运动副之间约束力的方程组,并对方程组进行了求解,得到了主要构件的惯性力表达式。在此基础上分析了惯性力的影响因素。其研究结论为降低往复式切割器惯性冲击力的影响,降低割台振动,优化结构提供了理论依据。
关键词:收割机;切割器;震动
Performance Analysis of Reciprocating Cutter, Vibration and Structure Optimization
Abstract:The kinematics and dynamics model of transmission in reciprocating reaping machine were established and the acceleration of primary component were analzed in this paper in order to decrease cutting platform vibration loss. The equations to resolve restraint force in all moving pair were set up thus the expression of inertia force were obtained. The factors of influencing inertia force were put forward based on these analysis. The conclusions were the theoretic foundation to decrese inertia force as well as cutting platform vibration and to optimize mechanism.
Keyword: reciprocating cutter ; cutting mechanism ; vibration
研究的内容
如今收割机的发展趋势是用新型材料以进一步减轻重量;采用低振动发动机和先进的减振隔振装置并合理配置机件,以减少振动对人体的危害;提高机械的加工和装配精度、改进吸排气系统,以减低噪声;增设各种安全保护装置,以提高作业安全性;在悬挂式割灌机上增设灌木切碎装置,简化割下灌木的清理工序。
无论现代收割机的类型或发展趋势如何,其基本构成是相同的,即都是由扶禾装置、切割器、输送装置、传动装置等组成。
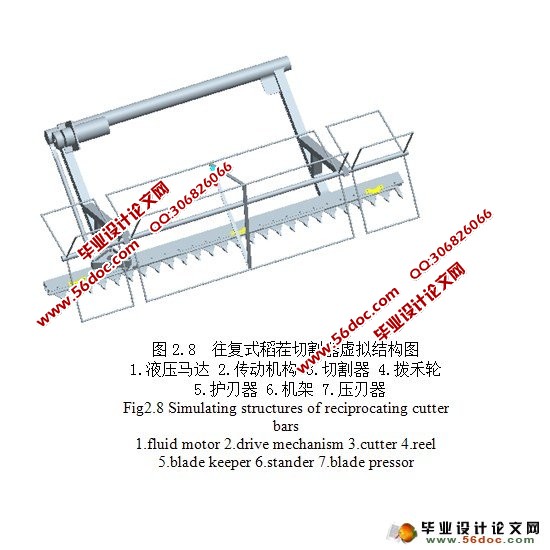
本文主要研究其切割器部分,其特点是刀片做直线往复运动,对此运动方式的传动机构做运动动力学分析,分析机构中由各种结构因素而引起的割台震动,并对其结构作出合理的分析,进行结构优化设计,以提高生产效率和机械质量,以便优化收割机整体性能,以便适应现代收割机的要求---重量轻;震动低。
研究主要内容:
(1)建立往复式稻茬切割器传动机构的运动学动力学模型;
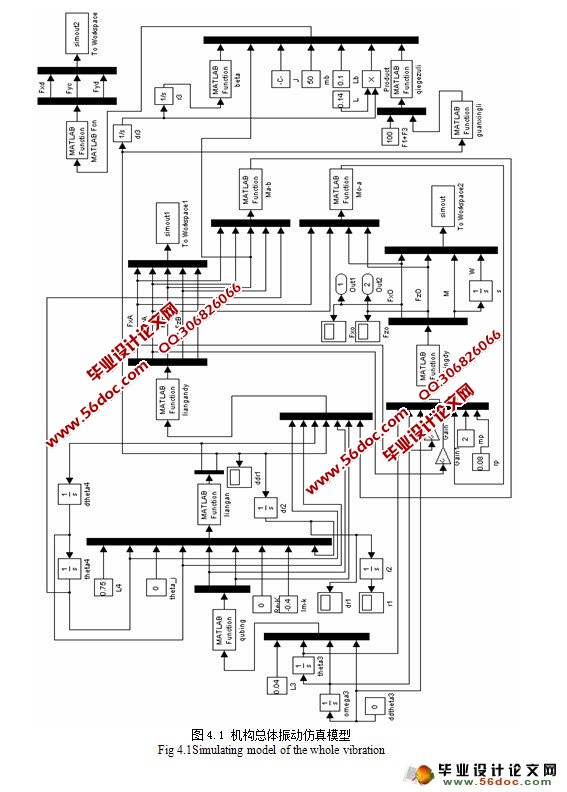
(2)在运动学动力学模型的基础上,建立基于MATLAB的稻茬切割机构的SMULINK振动模型,进行振动仿真分析,以探明传动机构惯性冲击力与各影响因素之间的关系,得到较优参数;
目 录
摘要: 1
关键词: 1
1绪论 2
1.1研究背景 2
1.2研究目的与意义 2
1.3研究现状 3
1.4研究的内容 4
2往复式切割器构造 5
2.1往复式切割器结构简介 5
2.1.1往复式切割器的构造以及主要类型 5
2.1.2往复式切割器传动机构 7
2.2小结 8
3往复式切割器传动机构动力学分析 10
3.1模型构造及其工作原理简介 10
3.2机构动力学分析 10
3.2.1曲柄连杆机构动力学分析 10
3.2.2三角摆块及割刀动力学分析 12
3.2.3机构力学分析 13
4MATLAB仿真分析 16
4.1MATLAB简介 16
4.1.1MATLAB中的工具箱SIMULINK简介 16
4.1.2SIMULINK特点 17
4.2SIMULINK模型建立 17
4.2.1SIMULINK建立的总体机构模型 18
4.2.2确定初始条件 19
4.2.3确定目标函数 19
4.3仿真结果分析 20
4.3.1连杆质量对机构振动影响 20
4.3.2曲柄转速对机构振动影响 20
4.3.3曲柄平衡块质心位置 对机构振动影响 21
4.3.4曲柄平衡块质量 对机构振动影响 22
4.3.5三角摆块平衡块质心位置 对机构振动影响 23
4.3.6三角摆块平衡块质量 对机构振动影响 23
4.3.7曲柄平衡块质心位置 和质量 对机构振动综合影响 24
4.3.8三角摆块平衡块质心位置 和质量 对机构振动综合影响 25
4.4数据分析 26
5结论 28
参考文献 29
致 谢 29
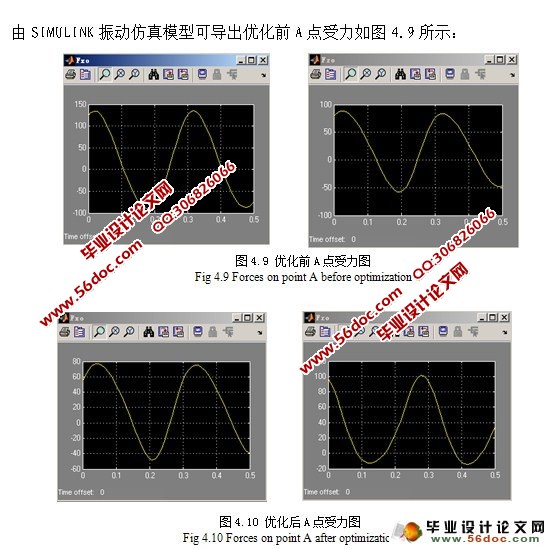
|