转运小车控制系统硬件设计论文(AGV)
来源:56doc.com 资料编号:5D4042 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D4042
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
摘要
自动导引小车(AGV)系统是集软、硬件为一体的自动化系统,它集成了计算
机、自动控制、电子、图像处理、通信、机械等多个学科技术。
本文详细介绍了自动导引小车的工作原理、分类、结构、应用和研究现状,在此基础上,设计了基于嵌入式控制系统的视觉导引AGV。主要工作和研究内容如下:
(1)进行了自动导引小车总体设计。
(2)完成了自动导引小车硬件系统设计。
(3)设计了基于视觉的分区导引控制算法;
(4)完成软件系统的设计。
最后进行了系统调试,达到预期的性能要求。
关键词:自动导引小车,AGV,嵌入式系统。
Abstract
Automatic Guided Vehicle(AGV)system is an automated system consists of software and hardware.It includes several technologies,such as computer, automatic control,electronic,image processing,communication,machinery and so on.
The working principle,classification, structure,application and research of AGV are introduced in detail in this paper, above which, the visual guiding AGV based on embedded control system is designed.The main work and research are as follows:
(1)The full system of the AGV is designed.
(2)The hardware of the AGV is designed.
(3)Zoning control algorithm based on visual guiding is designed;
Finally, the system debugging is accomplished,and the desired requirements are achieved.
Key words:AGV,Embedded System.
本课题的研究内容
自动导引小车是集软、硬件为一体的复杂自动化系统,集成了许多先进控制理论与技术,包括:计算机、自动控制、导航定位、车载伺服驱动与控制、交通管理、安全保护、货物装卸、无线电通讯、信息采集与处理等等,是一个涉及面比较广、内容比较全面的课题。特别是研究小车在一个未知的环境里如何进行实时自主导航及避障,是非常有意义的。
本课题研制的AGV性能与技术指标如下:
(1)能够通过远程控制台控制AGV的启停、装货卸货等操作;
(2)能够通过AGV上的触摸屏和按钮控制AGV的启停、装货卸货等操作;
(3)导引方式:采用视觉导引,能够沿固定在地面的宽度为25mm的红色导引带行驶;
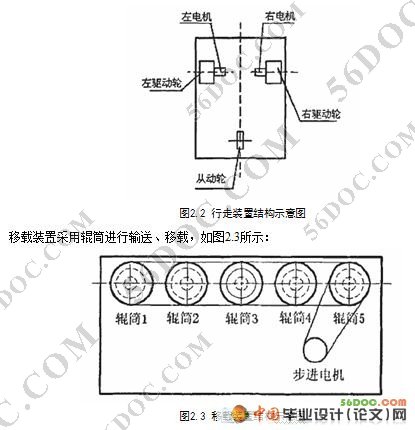
(4)额定载重量:40kg,移载方式为用滚筒移载;
(5)行走系统采用三轮式,两个驱动轮进行差速控制,行驶速度为0.3"-'0.8m/s;
(6)整个AGV的车体尺寸在800mmx500mmxlOOOmm(长×宽×高)左右;
(7)能灵活地改变行驶路径,定位精度小于25ram;
(8)整个AGV系统可以连续工作1个小时,充电方式为人工充电。
本论文主要进行了以下几方面的研究:
(1)AGV系统总体设计;
(2)AGV系统的机械结构与功能设计;
(3)AGV系统的硬件的选型、设计与基础;
(5)AGV系统的视觉导引分区控制算法的设计;
(6)系统各模块的调试及系统的联调。
目录 20000字
摘要 III
第1章 绪论 - 1 -
1.1 AGV概述 - 1 -
1.1.1AGV定义 - 1 -
1.1.2 AGV的分类 - 1 -
1.1.3 AGV的结构组成 - 4 -
1.1.4 AGV的技术指标 - 5 -
1.2 AGV国内外发展现状 - 6 -
1.2.1国外发展现状 - 6 -
1.2.2国内发展现状 - 6 -
1.3 AGV的应用 - 7 -
1.3.1 AGV的应用特点 - 7 -
1.3.2 AGV的应用领域 - 8 -
1.4本课题背景与研究内容 - 8 -
1.4.1问题的提出和意义 - 8 -
1.4.2本课题的研究内容 - 8 -
第2章 AGV系统总体设计 - 10 -
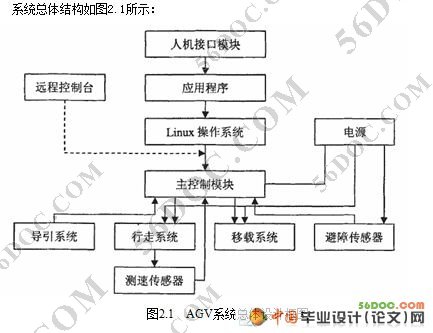
2.1 系统总体设计 - 10 -
2.2结构与功能设计 - 10 -
2.2.1 AGV的外观设计 - 11 -
2.2.2 导引系统 - 11 -
2.2.3 行走和移载装置 - 11 -
2.2.4 运动方式和动力装置 - 12 -
2.2.5 人机接口模块 - 12 -
2.3 AGV硬件选型与设计 - 13 -
2.3.1 AGV硬件系统总体设计 - 13 -
2.3.2主控制模块的选型 - 14 -
2.3.3 其它模块的选型 - 15 -
2.3.4 电源模块的设计 - 15 -
2.4 AGV的软件设计 - 15 -
2.4.1嵌入式操作系统的选择 - 15 -
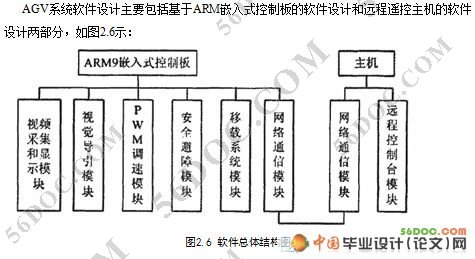
2.4.2 软件的总体设计 - 16 -
2.5 小结 - 16 -
第3章 AGV系统硬件设计 - 18 -
3.1 AGV机械结构设计 - 18 -
3.1.1 AGV总体结构设计 - 18 -
3.1.2 AGV行走系统设计 - 20 -
3.1.3 AGV移载系统的设计 - 20 -
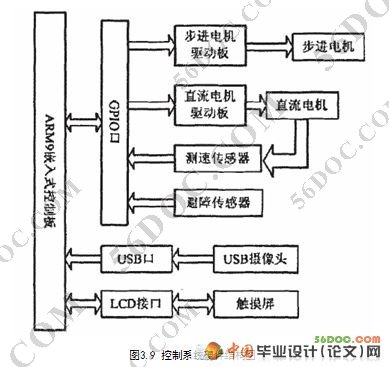
3.2 车载控制系统的选型与设计 - 20 -
3.2.1 主控制器模块 - 21 -
3.2.2 直流电机模块 - 21 -
3.2.3 步进电机模块 - 22 -
3.2.4 图像采集模块 - 22 -
3.2.5 安全避障模块 - 23 -
3.2.6 人机接口模块 - 24 -
3.3 电源模块的设计 - 24 -
3.3.1 电源转换模块 - 25 -
3.3.2 电源检测模块 - 26 -
3.3.3 电平转换 - 27 -
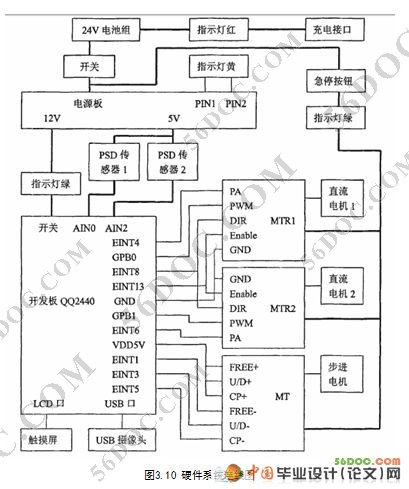
3.4 硬件系统结构图和连线图 - 29 -
3.5 本章小结 - 31 -
第4章 AGV软件系统设计 - 32 -
4.1 软件流程设计 - 32 -
第5章 总结与展望 - 34 -
参考文献 - 36 -
致谢 - 37 -
|