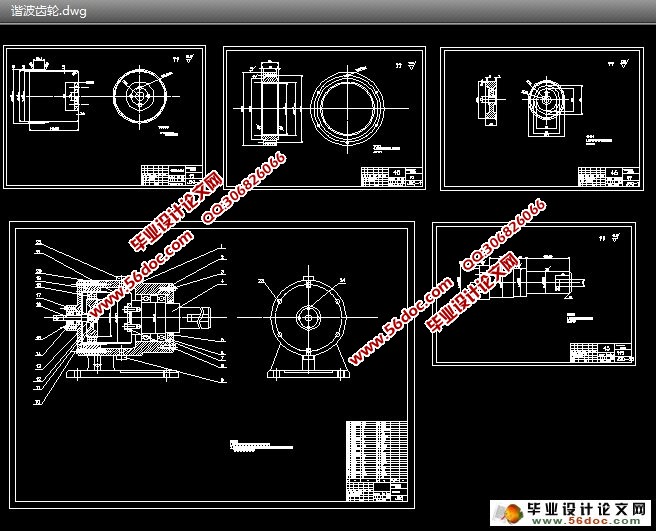
谐波齿轮减速器的设计(含CAD零件图和装配图)(选题审批表,任务书,开题报告,中期检查表,论文说明书11500字,CAD图5张)
摘 要:谐波传动是五十年代中期出现的一种新型传动,它随着空间技术的发展而迅速发展起来。由于谐波传动具有传动比大、体积小、传动精度高的特点,一开始就被运用在火箭、导弹、卫星等飞行器中,实现了他的优越性。目前这种传动技术已由航天飞行器,飞机中的应用迅速推广到原子能、雷达、通讯、造船、冶金、汽车、坦克、机床、仪表、防止、建筑、起重运输、医疗器械等各个部门。无论是作为数据传递的高精度传动,还是作为传递大转矩的动力传动,都得到了比较满意的效果。特别是,这种传动通过密封壁来传递机械运动,因而它用于操纵高温,高压的管路以及用来驱动工作在高真空,有原子辐射或其他有害介质空间的机构,是现有的其他一切传动所不能比拟的。
关键词:谐波传动,齿轮,减速器
The Design of Harmonic Gear Reducer
Abstract:Harmonic Drive is a newly established drive firstly appeared in the mid 1950s, with the rapid development space technology. With the attributes of high drive ratio, small volume and high transmission accuracy, harmonic drive was largely applied in aerocrafts such as rocket, missile and satellite. Nowadays, this drive technology has already been expanded from aerocraft to various aspects such as atomic energy, radar, communication, metallurgy, automobile, tank, machine tool, meter, architecture, medical mechanics and so on. No matter working as high-precision drive transmitting statistics, or as power transmission transmitting high torque, harmonic drive received satisfactory outcomes. This drive use sealed chamber to transmit mechanical movement, so that it has great merits over other drives when it is ustilized in controlling pipelines with high pressure and temperature, as well as driving mechanisms functioning in space environment which is high vacuum, and with atomic radiation and harmful media.
Key words: Harmonic Drive; Gear; Reducer
谐波齿轮传动就其本质来说, 是属Z-X-V 型行星齿轮传动。其工作原理如图1 所示, 它是由三个元件组成的, 即波发生器、柔轮和刚轮。其中任何一件均可固定不动, 其余两件作为输入件和输出件它可作为减速器使用, 也可作为增速器使用。通常, 刚轮为内齿轮, 固定不动; 波发生器为椭圆凸轮( 或双滚轮) , 作输入轴; 柔轮为外齿轮, 作输出轴; 而且大都采用2波传动, 即波发生器转1 转, 柔轮变形两次; 也即刚轮与柔轮的齿数差为2。若将波发生器装在柔轮中, 将使柔轮变为椭圆形, 此时, 处于长轴的齿将与刚轮齿接触啮合, 而处于短轴的齿则与刚轮齿脱开。当波发生器回转时, 将迫使柔轮齿依次同刚轮齿啮合, 由于相差2 齿, 故发生器转1 转, 将使柔轮在相反方向转过2 齿, 从而获得减速运动。
目 录
摘 要 1
1 前言 2
2 传动装置的总体 3
2.1 确定传动方案 3
2.2 传动比的计算及钢轮柔轮的齿数 5
2.3柔轮和刚轮的材料 5
2.3.1 柔轮材料 5
2.3.2 刚轮材料 7
2.3.3 凸轮轮材料 7
2.4波发生器的形式及几何参数,确定原始曲线方程 7
2.5 传动模数的我初步确定 9
3 谐波齿轮减速器的几何计算 10
3.1 选定主要啮合参数(x1,x2,ω0,hn) 10
3.1.1 基准齿形角 10
3.1.2 变位系数 10
3.1.3 径向变形量系数 11
3.1.4 齿廓工作段高度 11
3.2 柔轮和刚轮的主要几何尺寸 12
3.3 齿廓啮合干涉验算 12
3.4 保证传动正常工作性能的条件 13
4 柔轮,刚轮和波发生器的结构设计 13
4.1 柔轮和刚轮 13
4.2波发生器 17
4.2.1 柔性轴承的结构 17
4.2.2 保持器 19
5 柔轮的疲劳强度验算与稳定性校核 20
6 柔性轴承的寿命计算 22
7 传动效率估算 22
8 低速轴的设计 24
9 结论 24
参考文献 25
致 谢 25
|