镗铣加工中心换刀机械手设计(含CAD零件图和装配图)
来源:56doc.com 资料编号:5D11798 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D11798
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
镗铣加工中心换刀机械手设计(含CAD零件图和装配图)(任务书,开题报告,中期检查表,论文说明书14200字,CAD图12张)
摘 要:作为加工中心的重要组成部分,换刀机械手是加工中心稳定可靠运行的关键功能部件。为了更好的应用,机床工业中的机械手获得了广泛的研究,然而,有限的工作空间,比较差的灵活性,复杂换刀机械手的难于设计,导致人们把目光投向于少于6个自由度的换刀机械手,本篇论文描述了几个在自由度的数量和类型上都不相同的换刀机械手,这些换刀机械手可被用语对应运动机器,运动模拟器和工业机器人。
关键词:机械手;运动机械;自由度;机器人
Design of The Automatic Tool Exchange Device for The Boring And Milling Machine Center
Abstract:As an important component of the machining center,the ATC manipulator is a key feature part of the machining center which ensures it stable and reliable operation.Parallel manipulators for the machine tool industry have been studied extensively for various industrial applications. However, limited useful workspace areas, the poor mobility, and design difficulties of more complex parallel manipulators have led to mare interest in parallel manipulators with less than six degrees of freedom (DoFs). Several parallel mechanisms with various numbers and types of degrees of freedom are described in this paper, which can be used in parallel kinematics machines, motion simulators, and industrial robots.
Key words:parallel manipulator;parallel kinematic machine;degree of freedom;robot
设计任务
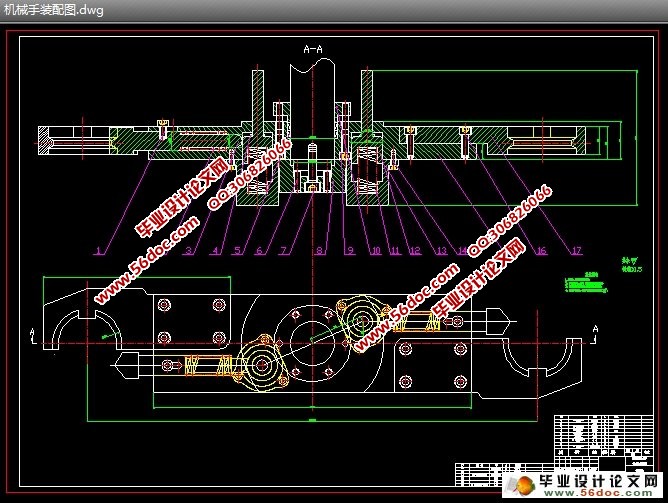
本次设计的主要任务是:自动换刀机械手,实现镗铣加工中心的自动换刀,需要换的刀具主要是BT40型刀柄,需要实现的工作是抓刀—换刀—松刀的动作。
主要技术参数:刀具最大重量1.5kg,双臂回转式换刀,刀臂数量和长度以及直径主要依据配套刀库的设计要求。换刀时间3.5S。
机械手的平稳性
工业生产要求机械手工作速度快,运动平稳,定位精度高。应注意其影响因素,设计合理结构,以满足要求。
目 录
摘要………………………………………………………………………………………1
关键词………………………………………………………………………………1
1前言…………………………………………………………………………………2
2机械手的相关介绍 ……………………………………………………………………2
2.1数控技术的发展历程………………………………………………………………2
2.2 数控加工中心的基本功能 ……………………………………………………… 3
2.3 加工中心的组成部分 ……………………………………………………………3
2.3.1 刀库………………………………………………………………………3
2.3.2 刀具交换装置……………………………………………………………4
2.3.3 运刀装置 ………………………………………………………………4
2.3.4 刀具编码装置……………………………………………………………5
2.3.5 刀具识别装置…………………………………………………………5
2.4 刀库的驱动及定位………………………………………………………………5
2.5 我国数控技术的发展状况………………………………………………………6
2.6 数控技术的发展趋势 …………………………………………………………6
3 换刀机械手的总体方案设计……………………………………………………………6
3.1 设计任务…………………………………………………………………………6
3.2机械手的平稳性…………………………………………………………………7
3.3机械手的运动特性分类…………………………………………………………8
3.4 开关型机械手的速度及位置控制……………………………………………… 9
3.5 机械传动行机械手的速度及位置控制……………………………………………9
3.6 机械手类型确定………………………………………………………………… 10
3.7 驱动系统及电控统的选择……………………………………………………10
4 总体结构设计………………………………………………………………………… 13
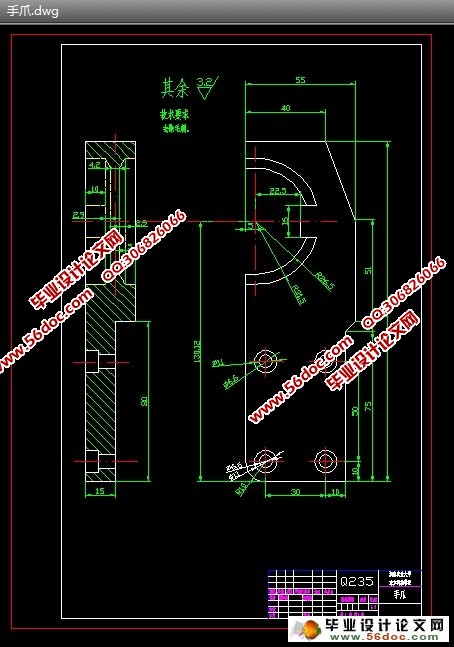
4.1 手爪部分设计……………………………………………………………………13
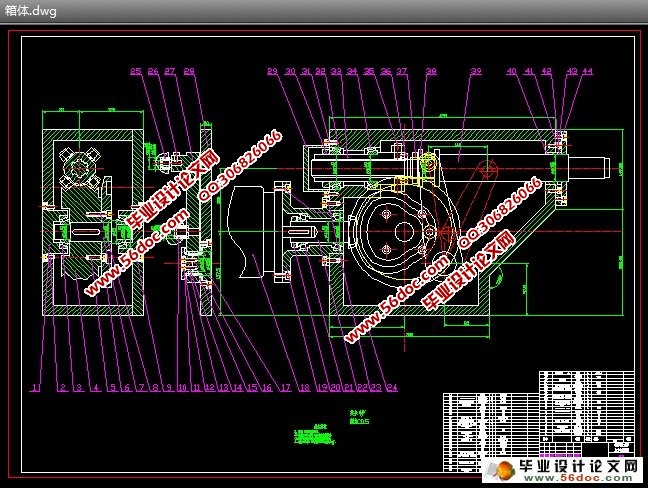
4.2 机械手手臂设计 ………………………………………………………………14
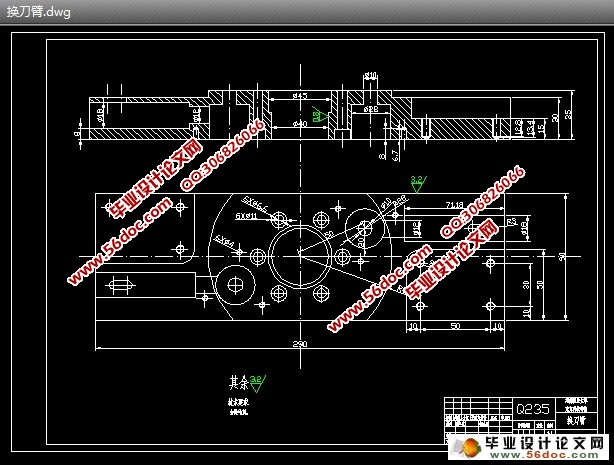
4.3 机械手传动结构的设计………………………………………………………16
5 换刀机械手的参数和计算……………………………………………………………… 19
5.1 手臂的弯曲变形………………………………………………………………… 19
5.2 电动机的选择…………………………………………………………………… 20
6 换刀过程………………………………………………………………………………… 21
7结束语…………………………………………………………………………………… 25
参考文献…………………………………………………………………………………… 25
致谢…………………………………………………………………………………………26
附录…………………………………………………………………………………………26
|