气动机械手系统设计(含CAD二维图,Proe三维图)(任务书,开题报告,论文说明书10000字,CAD图4张,Proe三维图)
摘要
机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。在工业生产中应用的机械手被称为“工业机械手”。生产中应用机械手可以提高生产的自动化水平和劳动生产率;可以减轻劳动强度、保证产品质量、实现安全生产;本论文主要论述了机械手的结构、气动控制系统、主要技术参数、气缸的选型设计以及PLC控制程序的设定。
本设计主要是通过可编程控制技术来实现气压驱动机械手,从而完成立柱的升降/回转、手臂的伸出/缩回和手爪的抓取动作。本设计探索的意义是希望能够通过简单的改变机械手的工作程序,来达到相要求的工作效果。PLC控制系统的机械手,简易方便且适应性较强,这对于未来机械手的发展有着重要意义。
关键词:机械手;气动系统;气缸;可编程控制器;梯形图;
Abstract
The manipulator is imitate the part of the hand, according to the given program, track and requirements for automatic capture, handling or operation of the automatic mechanical device. The manipulator is used in the industrial production is known as "industrial manipulator". Production of mechanical hand can improve the automation level of production and labor productivity; can reduce labor intensity, to ensure product quality, to achieve safe production; this paper mainly discusses the structure of the manipulator, pneumatic control system, the selection of the main technical parameters, cylinder design and PLC control program.
This design is mainly through the programmable control technology to realize the pneumatic drive manipulator, thus completing the column lifting / rotation, arm extension / retraction and hand grasping movements.To explore the significance of this design is to be able to change through a simple mechanical hand working procedures, to achieve the work requirements. PLC manipulator control system is simple and convenient, and strong adaptability, which has an important meaning for the future development of the manipulator.
Key words: Manipulator ; Pneumatic system ; Cylinder ; PLC ; Ladder diagram ;
本课题研究的主要内容
本课题主要是通过可编程控制器来实现机械手的功能要求和现实意义,并对机械手的工作原理加以学习和了解,熟悉了其运动机理等。在现有机械手技术基础上,确定了搬运机械手的基本系统结构,对机械手的运动进行了简单的力学模型分析,完成了机械手传动部分、执行系统、驱动系统等系统的相关设计,并对机械手的控制技术进行了一定的阐述。
2.1.2 工作要求
本设计机械手主要用于自动输送线的上下料,采用气动方式驱动,可控制编程进行控制。由于机械手工作速度的稳定性较差、冲击大、气源压力较低,手爪抓重一般在30kg以下,所以结合工业生产的实际情况。
2.1.3 运动要求
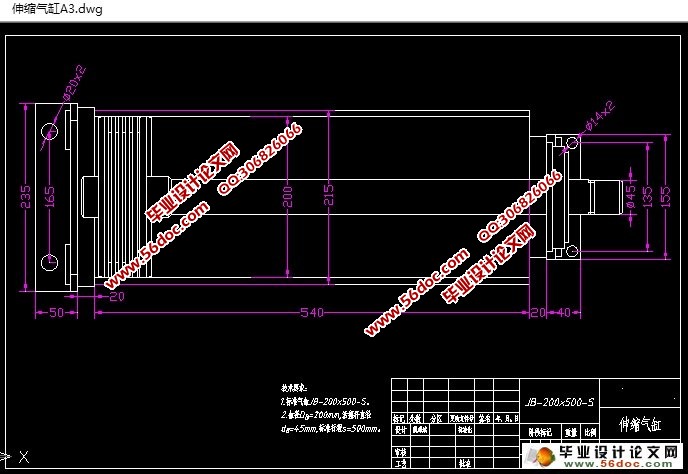
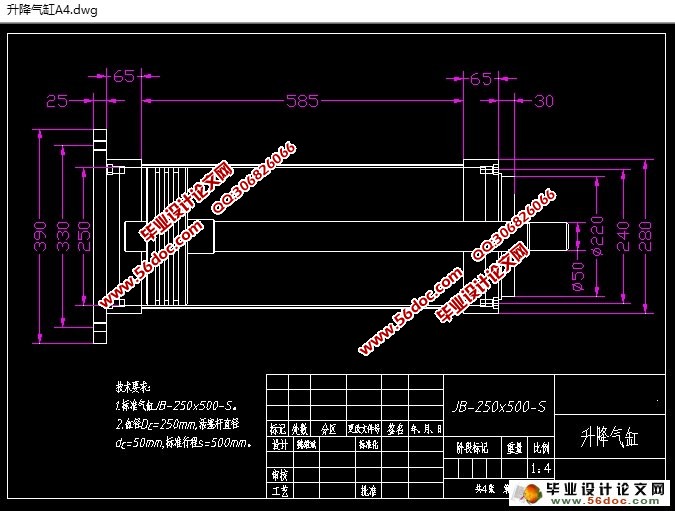
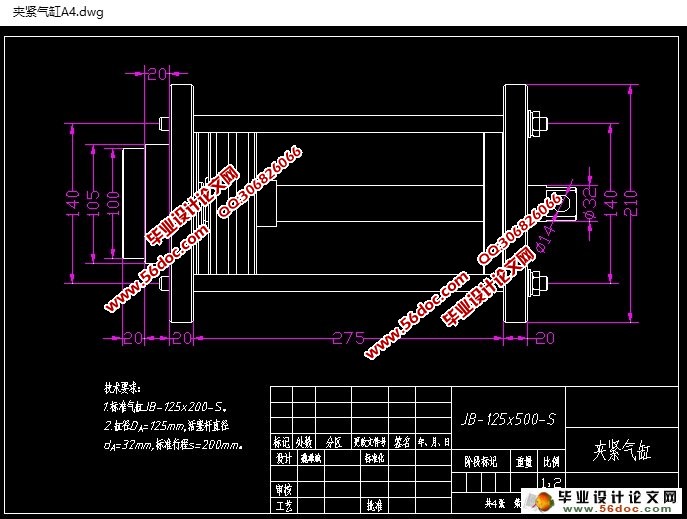
由于影响机械手动作快慢的主要因素是立柱的升降/回转、手臂的伸缩和手爪的抓取速度。本设计确定该手臂升降行、伸缩行程均定为500mm;手臂回转行程范围定为00-1800;立柱升降、手臂伸缩、立柱回转一次时间 ;手爪伸缩行程定为200mm,手爪抓取一次时间 。
2.1.4 动力要求
手臂设计还包括手爪伸缩气缸推力FA≥5kN;手臂伸缩气缸推力FB≥15kN;立柱回转气缸推力FC≥20kN;立柱升降气缸推力FD≥30kN。
2.2 设计气动控制回路
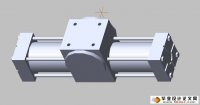
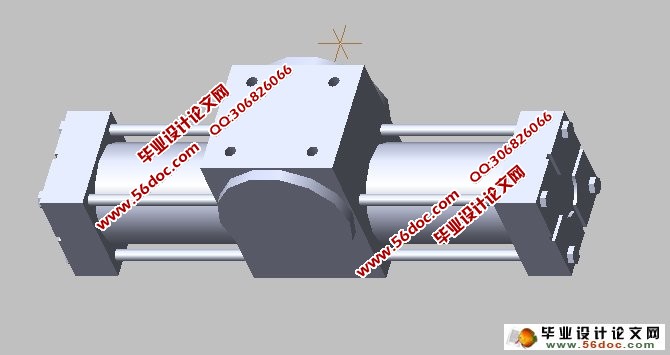
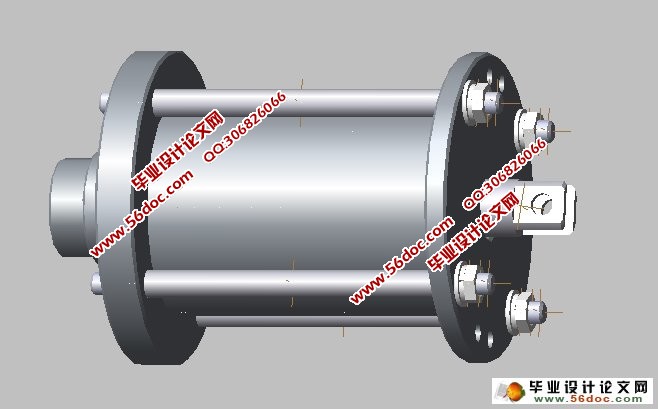
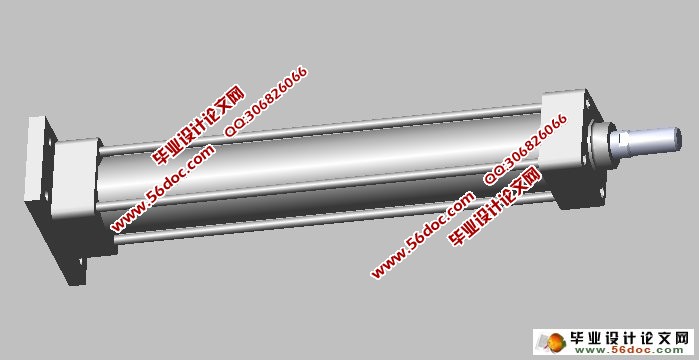
根据机械手(图2-1)结构的设计要求,其中A缸为夹紧缸,当活塞杆退回时将工件夹紧,当活塞杆伸出时将工件松开;B缸为伸缩缸,实现手臂的伸出和缩回动作;C缸为升降缸,实现立柱的上升和下降动作;D缸为回转缸,通过齿轮齿条将活塞的直线运动转换为立柱的旋转运动,从而实现立柱的回转运动。
目录
摘要 I
Abstract II
第一章 引言 - 1 -
1.1 本课题的目的和意义 - 1 -
1.2 本课题研究的主要内容、预期结果、关键问题和相关发展趋势 - 1 -
1.2.1 本课题研究的主要内容 - 1 -
1.2.2 预期设计结果 - 1 -
1.2.3 关键问题 - 1 -
1.2.4 相关发展趋势 - 2 -
1.3 本课题的设计方法 - 2 -
1.4 系统功能说明 - 3 -
第二章 机械手气动系统设计 - 4 -
2.1 明确机械手的工作要求 - 4 -
2.1.1 气动机械手结构示意图分析 - 4 -
2.1.2 工作要求 - 5 -
2.1.3 运动要求 - 5 -
2.1.4 动力要求 - 5 -
2.2 设计气动控制回路 - 5 -
2.2.1 列出气动执行元件的工作程序 - 5 -
2.2.2 作X-D线图,写出执行信号的逻辑表达式 - 6 -
2.2.3 画出系统的逻辑原理图 - 7 -
2.2.4 画出系统的气动回路原理图 - 7 -
第三章 气缸及气动元件设计 - 10 -
3.1 手臂回转、伸缩、夹紧、升降气缸的设计 - 10 -
3.3.1 确定气缸类型 - 10 -
3.3.2 气缸内径计算 - 10 -
3.3.3 选择气缸 - 11 -
3.3.4 验算气缸力的大小 - 11 -
3.3.5 活塞杆直径d的校核 - 12 -
3.3.6 耗气量计算 - 13 -
3.2 选择气动控制元件 - 14 -
3.2.1 选择主控气动换向阀 - 14 -
3.2.2 选择行程阀 - 14 -
3.2.3 选择手控换向阀 - 15 -
第四章 机械手控制系统的设计 - 16 -
4.1 控制系统分析 - 16 -
4.1.1 总体控制要求 - 16 -
4.1.2 PLC机械手的动作分析 - 16 -
4.1.3 系统硬件配置 - 17 -
4.2 系统变量定义及分配表 - 17 -
4.2.1 输入/输点数分配 - 17 -
4.2.2 输入/输出点地址分配 - 18 -
4.2.3 系统接线图 - 18 -
4.2.4 PLC外围接线图 - 19 -
4.3 控制系统程序设计 - 20 -
4.3.1 控制程序流程图设计 - 20 -
4.3.2 程序设计(梯形图) - 21 -
第五章 PLC机械手的程序调试 - 28 -
5.1 系统调试及结果分析 - 28 -
5.1.1 PLC程序调试及解决的问题 - 28 -
5.1.2 PLC与上位机联调 - 28 -
5.1.3 结果分析 - 28 -
第六章 设计总结 - 30 -
参考文献 - 31 -
致谢词 - 32 -
|