智能助行机器人设计-行走机构与机械系统设计(附SolidWorks三维图)(任务书,开题报告,外文翻译,论文说明书9400字,SolidWorks三维图)
摘 要
通过对机器人的研究开发,研制出一款帮助行走不便的老人和弱视的残疾人的日常辅助行走机器人。但目前国内外的助行机器人的缺点较多:自身重量较大、提供的承载能力不足、不能适应复杂的环境和地面和所需传感器价值的昂贵等 。本次论文便是尽可能的解决以上问题,并完成机器人的机械设计、运动学分析等方面。
根据分析出的机器人的研制目标,最终确定出机器人的总体设计方案。通过机器人的设计特点和相关元件着手,确定电机以链传动带动后轮差动方式驱动的机器人行走,以丝杠螺母的方式辅助用户完成站立坐下等动作,再以蜗轮蜗杆完成自锁。
关键词:机器人,机构设计,助行,智能。
The walker robot design - walking mechanism and mechanical system design
Abstract
Through the research and development of the robot ,walking robot is developed to help the old man walking and amblyopia of disabled People's Daily assisted . But a walker robot at home and abroad has more disadvantages: its weight is bigger, the bearing capacity of less than, can not adapt to the complex environment and the ground, and the required expensive sensor value, etc. This thesis is as much as possible to solve the above problems, and complete the robot mechanical design and kinematics analysis, etc.
According to the analysis of the robot's development goals, and ultimately determine the overall design of the robot. Through the design characteristics of the robot and related components, determine the motor to drive chain drives the rear wheel differential way of walking robot, assist the user in the form of lead screw nut finish the action, such as stand up sit down again to complete self-locking worm gear and worm.
Keywords: robot, mechanism design, walker,smart.
目 录
摘 要 III
Abstract IV
第1章 绪 论 5
1.1课题背景 5
1.2国内外研究的助行机器人 5
1.2.1日本助行机器人 5
1.2.2国内助行机器人的研究 6
第2章 助行机器人的总体设计方案 8
2.1助行机器人研制目标 8
2.1.1适用环境分析 8
2.1.2使用人群分析 8
2.1.3运行速度 8
2.1.4工作时间和自重 9
2.2助行机器人设计方案 9
2.2.1初定方案 9
2.2.2助行机器人的基本技术参数确定 9
2.2.3机构设计分析 10
2.2.4驱动方式的选择 11
2.2.5 助行机器人的材料选择 11
2.3目前的助行机器人的优缺点分析 11
第3章 助行机器人各组成部分结构设计 13
3.1助行机器人的机构模块确定 13
3.2驱动元和传动元件的选择 14
3.2.1驱动元件的选择 14
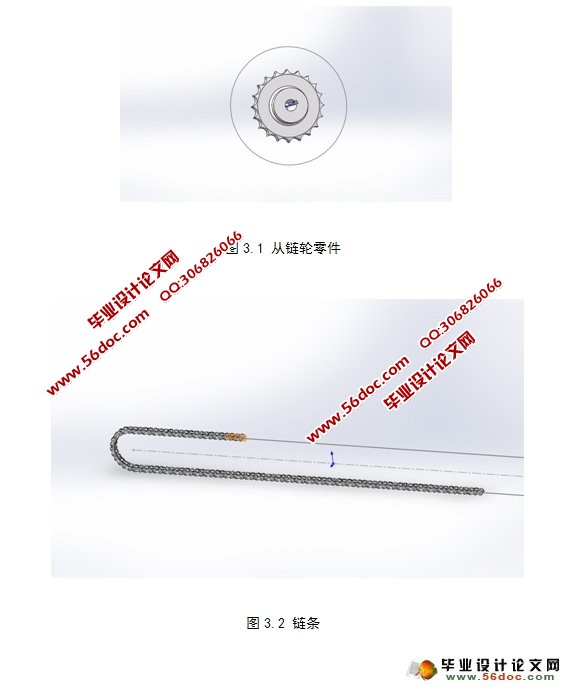
3.2.2传动元件的选择 14
3.3底盘模块的机构设计 15
3.3.1底盘模块的相关计算与电机选择 15
3.3.2样机重要零部件设计 17
3.3.3伞齿轮设计 19
3.3.4驱动轮模块设计 19
3.3.5非驱动轮模块 20
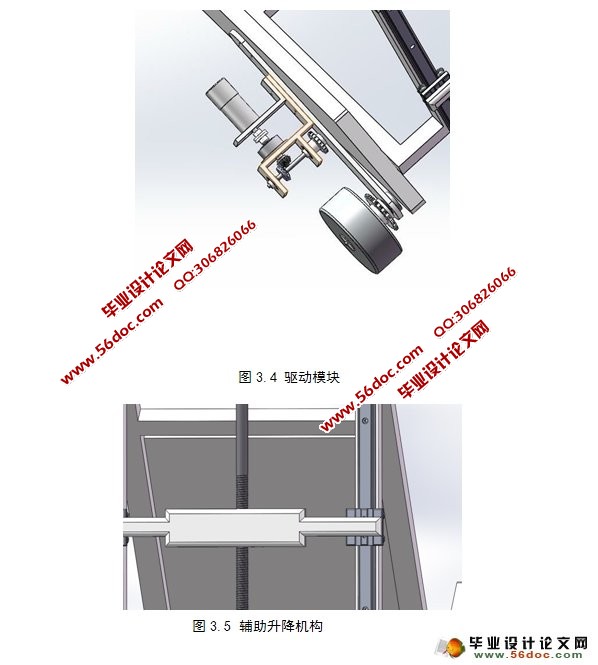
3.4辅助升降机构 20
3.4.1确定设计方案 20
3.4.2丝杠螺母选择 21
3.4.3电机及减速器等的选择 21
结 论 23
参考文献 25
致 谢 25
|