ЩњВњЯпГЕДВЩЯСЯЛњаЕЪжНсЙЙЩшМЦ(КЌCADСуМўзАХфЭМ)
РДдДЃК56doc.com зЪСЯБрКХЃК5D13881 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D13881
зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
ЩњВњЯпГЕДВЩЯСЯЛњаЕЪжНсЙЙЩшМЦ(КЌCADСуМўзАХфЭМ)(ШЮЮёЪщ,ЩшМЦЫЕУїЪщ32000зж,CADЭМжН7еХ)
БОЮФжївЊеыЖдЩњВњЯпЩЯЕФздЖЏЛЏЩшМЦСЫвЛИіФЃПщЙЄзАЯТЯпЛњаЕЪжЃЌЪЕЯжФЃПщЯТЯпЕФздЖЏЛЏЁЃИУЛњаЕЪжФмЪЕЯжЛњаЕЪжЕФЩьЫѕЁЂЩ§НЕЁЂМаНєКЭЗХЫЩЕШЖЏзїЁЃЧ§ЖЏЯЕЭГВЩгУЦјбЙЧ§ЖЏЃЌЪЕЯжСЫЪжБлЕФМаНєКЭЗХЫЩЖЏзїЁЃПижЦЯЕЭГВЩгУPLCПижЦЃЌЭЈЙ§ПижЦЫХЗўЕчЖЏЛњРДЪЕЯжЛњаЕЪжЕФЩЯЯТЁЂзѓгвдЫЖЏЁЃЛњаЕЪжЩшЪжЖЏКЭздЖЏСНжжЙЄзїЗНЪНЃЌПЩвдЭЈЙ§зЊЛЛПЊЙиНјааЙЄзїЗНЪНзЊЛЛЁЃЯЕЭГЩшгаБЈОЏЙІФмЃЌЕБЛњаЕЪжГіЯжЙЪеЯЪБЃЌФмМАЪББЈОЏЁЃ
ЭЈЙ§ЩЯЪіЙЄзї,ЛњаЕЪжзюжеФмЙЛАДееПижЦГЬађЕФвЊЧѓНјаадЫЖЏ,ВЂЧвЪЕЯжСЫЩЯЮЛЛњМрПиЯЕЭГЖдБОЛњаЕЪжЕФжБЙлаЮЯѓЙлВт,ДяЕНСЫБОТлЮФЕФЩшМЦФПЕФКЭвЊЧѓЁЃ
гУЭОЃКгУгкздЖЏЫЭСЯЯпЃЌЪЕЯжСїЫЎЯпздЖЏзАХфЁЃ
1ЁЂзІжи 10kg
2ЁЂздгЩЖШЪ§ 4ИіздгЩЖШ
3ЁЂзљБъаЭЪН дВжљзљБъ
4ЁЂЪжБлзюДѓжааФИп 1200mm
5ЁЂЪжБлдЫЖЏВЮЪ§ ЩьЫѕааГЬ500mm
ЩьЫѕЫйЖШ200mm/s
Щ§НЕааГЬ600mm
Щ§НЕЫйЖШ150mm/s
ЛизЊЗЖЮЇ0°—180°
ЛизЊЫйЖШ60°/s
6ЁЂЪжЭѓдЫЖЏВЮЪ§ ЛизЊЗЖЮЇ0°—90°
ЛизЊЫйЖШ45°/s
7ЁЂЪжжИМаГжЗЖЮЇ ЙЄСЯ:Φ90-120mm
8ЁЂЖЈЮЛЗНЪН ааГЬПЊЙиЛђПЩЕїЛњаЕЕЕЕШ
9ЁЂЖЈЮЛОЋЖШ ±3mm
10ЁЂЧ§ЖЏЗНЪН вКбЙЧ§ЖЏ
ФПЁЁТМ
Ек1еТ аїТл 1
1.1 ЙЄвЕЛњаЕЪжИХЪі 1
1.1.1 ЛњаЕЪжЕФгІгУад 2
1.1.2 ЛњаЕЪжЯШНјад 2
1.1.3 ЙњФкЭтбаОПЯжзДКЭЧїЪЦ 3
1.2 ЩшМЦФПЕФ 4
1.3 ПЮЬтФкШнКЭЩшМЦвЊЧѓ 4
1.4 ЛњаЕЪжЯЕЭГЙЄзїдРэМАзщГЩ 6
Ек2еТ ЛњаЕЪжећЬхЩшМЦЗНАИТлЪігыжЄУї 10
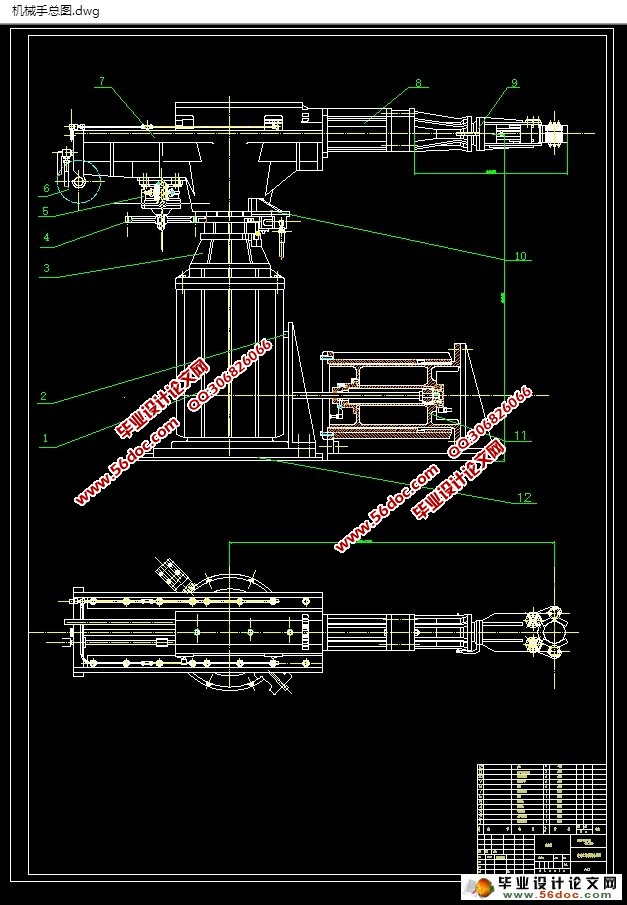
2.1 ЛњаЕЪжЕФзмЬхЩшМЦ 10
2.1.1 ЛњаЕЪжећЬхНсЙЙРраЭ 10
2.1.2 зјБъаЮЪНКЭЛњаЕЪжЕФздгЩЖШ 11
2.1.3 ЩшМЦОпЬхВЩгУЗНАИ 12
2.2 ЛњаЕЪжбќзљНсЙЙЩшМЦ 13
2.2.1 ЛњаЕЪжбќзљНсЙЙЩшМЦвЊЧѓ 13
2.2.2 ЩшМЦОпЬхВЩгУЗНАИ 14
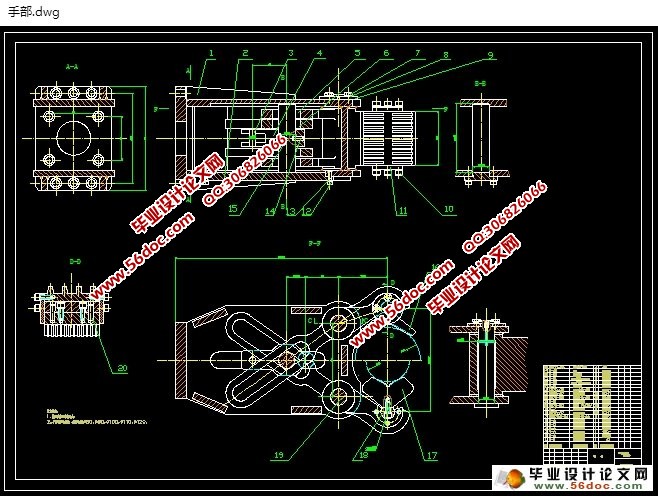
2.3 ЛњаЕЪжЪжБлНсЙЙЕФЩшМЦ 15
2.3.1 ЛњаЕЪжЪжБлЩшМЦвЊЧѓ 15
2.3.2 ЩшМЦОпЬхЪЙгУЕФГЬађ 16
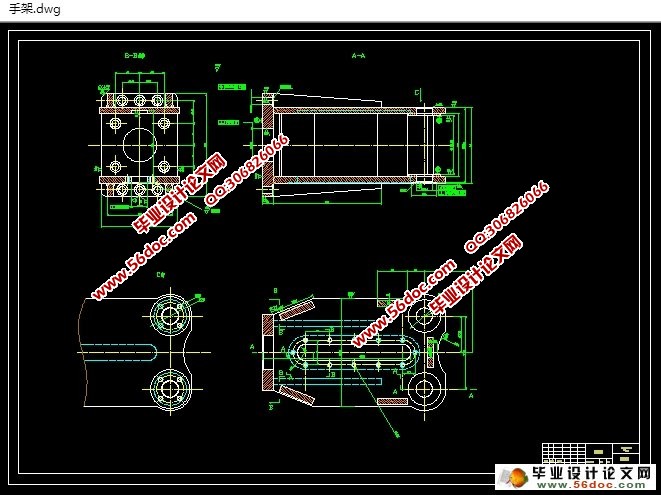
2.4 ЛњаЕЪжЭѓВПЕФНсЙЙЩшМЦ 16
2.4.1 ЛњЦїШЫЪжЭѓНсЙЙЕФЩшМЦвЊЧѓ 17
2.4.2 ЩшМЦГЬађЕФОпЬхдЫгУ 17
2.5 ЛњаЕЪжФЉЖЫжДааЦїЃЈЪжзІЃЉЕФНсЙЙЩшМЦ 18
2.5.1 ЛњаЕЪжФЉЖЫжДааЦїЕФЩшМЦвЊЧѓ 18
2.5.2 ЛњаЕЪжЧ§ЖЏФЃЪН 19
2.5.3 ЛњЦїШЫМаГжЦїЕФЕфаЭНсЙЙ 19
2.5.4 ЩшМЦОпЬхЪЙгУЕФГЬађ 20
2.6 ЛњаЕЪжЕФЛњаЕДЋЖЏЛњЙЙЕФЩшМЦ 21
2.6.1 ЙЄвЕЛњЦїШЫДЋЖЏЛњЙЙЩшМЦгІзЂвтЕФЮЪЬт 21
2.6.2 ЙЄвЕЛњЦїШЫГЃгУЕФДЋЖЏЛњЙЙаЮЪН 22
2.6.3 ЩшМЦОпЬхВЩгУЗНАИ 25
2.7 ЛњаЕЪжЧ§ЖЏЯЕЭГЕФЩшМЦ 25
2.7.1 ЛњЦїШЫИїРрЧ§ЖЏЯЕЭГЕФЬиЕу 25
2.7.2 ЙЄвЕЛњЦїШЫЧ§ЖЏЯЕЭГЕФбЁдёддђ 26
2.7.3 ЛњЦїШЫвКбЙЧ§ЖЏЯЕЭГ 26
2.7.4 ЛњЦїШЫЦјЖЏЧ§ЖЏЯЕЭГ 28
2.7.5 ЛњЦїШЫЕчЖЏЧ§ЖЏЯЕЭГ 29
2.7.6 ЩшМЦОпЬхЪЙгУЕФГЬађ 32
2.8 ЛњЦїШЫЪжБлЕФЦНКтЛњЙЙЩшМЦ 32
2.8.1 ЛњЦїШЫЦНКтЛњжЦЕФаЮГЩ 32
2.8.2 ЩшМЦОпЬхЗНАИ 33
2.9 ЛњаЕЪжЕФжївЊММЪѕВЮЪ§ 33
Ек3еТ ЛњаЕЪжЩшМЦМЦЫу 35
3.1 МаГжЪНЪжзЅЕФЩшМЦМЦЫу 35
3.1.1 ЪжзЅВПСІЕФМЦЫу 35
3.1.2 ЪжВПМгНєгЭИзЕФШЗЖЈ 36
3.2 ЭѓВПЩшМЦ 36
3.2.1 ЭѓВПЕФЩшМЦвЊЧѓ 37
3.2.2 ЭѓВПЕФНсЙЙ 38
3.3 БлВПЩшМЦ 41
3.3.1 БлВПЩшМЦвЊЧѓ 42
3.3.2 БлВПНсЙЙ 46
3.3.3 БлВПЩьЫѕдЫЖЏНсЙЙ 47
3.3.4 БлВПЩьЫѕгЭИзЕФМЦЫу 48
3.3.5 БлВПЛизЊдЫЖЏ 50
3.3.6 БлВПЩ§НЕдЫЖЏ 51
3.3.7 БлВПЩ§НЕгЭИзЕФМЦЫу 52
Ек4еТ ЛњаЕЪжЕФЦфЫћВПЗжзАжУ 55
4.1 ЛКГхЖЈЮЛзАжУ 56
Ек5еТ ЛњаЕЪжзмЬхЗНАИзмНс 57
5.1 ДЋЖЏЗНАИЕФШЗЖЈ 57
5.2 ЙцИёВЮЪ§ 57
5.3 НсЙЙЬиЕу 58
ВЮПМЮФЯз 60
жТаЛ 61
|