挖掘机动臂焊接工艺分析(含CAD图,SolidWorks,IGS三维图)(论文说明书8200字,CAD图纸7张,SolidWorks三维图,IGS通用三维格式,STEP通用三维格式)
The analysis on welding process of excavator boom
摘要
随着国内工程机械行业的快速发展,挖掘机市场的竞争也日趋激烈,各主机厂不但从成本上,也在质量上展开了激烈的竞争。动臂部分,作为挖掘机最重要的承载结构,在工作中承受着绝大多数的载荷,是最常发生故障的部分,而其中尤以动臂的失效影响最大,动臂质量成为影响整机产品可靠性的因素之一。 我国生产的挖掘机从仿制开始起步,近期产品的质量较早期有所提高。但受国产对挖掘机的焊接质量及设计水平等的影响,我国目前生产的挖掘机的总体水平,与进口产品及港口用户的要求仍有较大差距,焊接工艺之间的差距尤为明显,为满足市场及焊接工艺需求,对挖掘机焊接工艺进行深层次的研究和分析势在必行!
本毕业设计课题来自于企业的生产实际,通过对挖掘机焊接工艺进行分析和设计,掌握挖掘机焊接的整个生产流程,培养工程意识。随着国家经济的繁荣及基础建设的飞速发展,挖掘机的应用及需求日益增长。然而在挖掘机生产制造过程中的动臂焊接工艺成为挖掘机整机质量及性能的重要决定因素,焊接变形的控制对挖掘机动臂焊接工艺有着重要的意义。
关键词:行业;挖掘机;焊接工艺;意义
Abstract
For a lot of special places, like the risk is very big, or we are difficult to reach, such as disarm bombs, unknown corresponding domains such as detection, probing deep of more dangerous situation usually need to implement the robot.It’s a main part of robot for micro pedipulator, walking robots and more than six feet, compared to the eight legged robot, because of strong bearing capacity, good stability, which the meritss is simple construction, So a large number of researchers around the world, start .This paper mainly to the four bar mechanism as the main execution elements to design of micro walking the whole scheme of the four bar mechanism.
Its principle is diagonal synchronization, leg activity by the structure of the crank rocker, front leg movements around the same, it detailed performance curve characteristics of the connecting rod,when the curve trajectory diagonal straight line segment, the robot is stationary, the motion trajectory when the diagonal curve is slanting line do the walking.
Keywords:Manufacturing ,Location, Clamping, Process
本课题是对挖掘机焊接工艺分析。具体包括以下内容:
(1)介绍挖掘机机动臂的结构原理,合理地设计和改善其焊接工艺等,确定挖掘机机动臂的结构。
(2)对确定好的挖掘机机动臂进行机械结构设计。
(3)挖掘机动臂的材料选择及其焊接工艺分析。
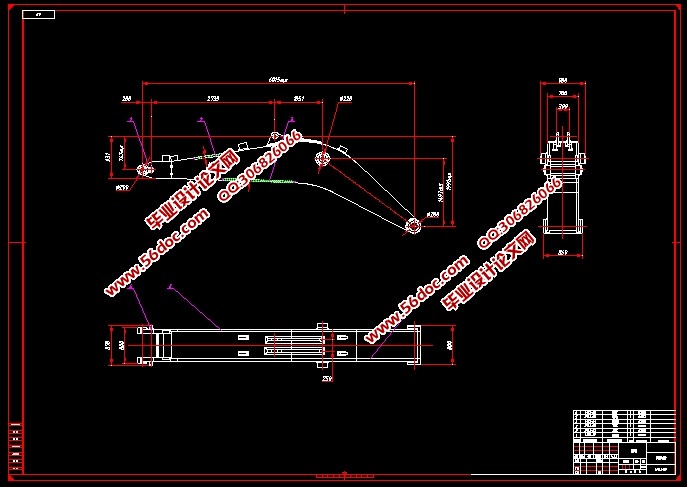
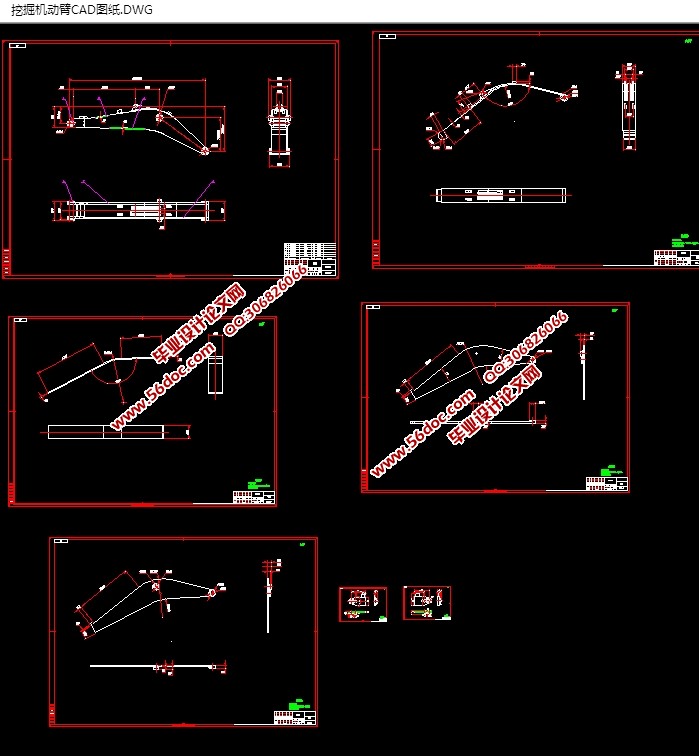
2 挖掘机动臂结构的设计
2.1 挖掘机动臂的组成结构
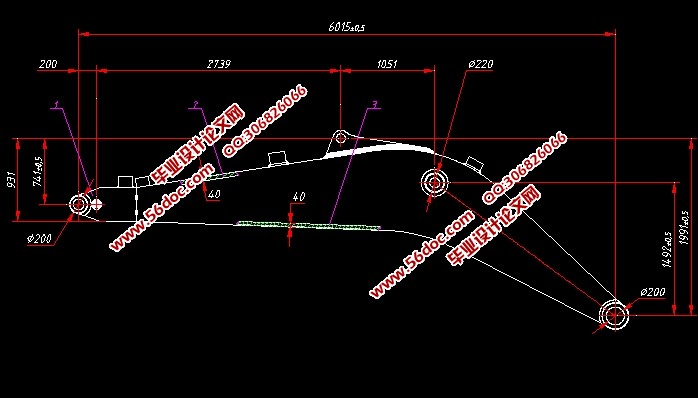
本次设计的挖掘机动臂主要由安装板,上、下封板,吊耳等组成。
2.2 挖掘机动臂的工作原理
液压挖掘机主要由发动机、液压系统、工作装置、行走装置和电气控制等部分组成。液压系统由液压泵、控制阀、液压缸、液压马达、管路、油箱等组成。电气控制系统包括监控盘、发动机控制系统、泵控制系统、各类传感器、电磁阀等。液压挖掘机一般由工作装置、回转装置和行走装置三大部分组成。根据其构造和用途可以区分为:履带式、轮胎式、步履式、全液压、半液压、全回转、非全回转、通用型、专用型、铰接式、伸缩臂式等多种类型。工作装置是直接完成挖掘任务的装置。它由动臂、斗杆、铲斗等三部分铰接而成。动臂起落、斗杆伸缩和铲斗转动都用往复式双作用液压缸控制。为了适应各种不同施工作业的需要,液压挖掘机可以配装多种工作装置,如挖掘、起重、装载、平整、夹钳、推土、冲击锤等多种作业机具。回转与行走装置是液压挖掘机的机体,转台上部设有动力装置和传动系统。发动机是液压挖掘机的动力源,大多采用柴油要在方便的场地,也可改用电动机。液压传动系统通过液压泵将发动机的动力传递给液压马达、液压缸等执行元件,推动工作装置动作,从而完成各种作业。
目 录
摘要 I
Abstract II
1绪论 1
1.1国内外研究现状 1
1.2挖掘机的分类 3
1.3本课题研究的主要内容 5
2挖掘机动臂结构的设计 7
2.1挖掘机动臂的组成结构 8
2.2挖掘机动臂的工作原理 9
3挖掘机动臂的焊接工艺分析 10
3.1挖掘机动臂用材料及其焊接性 11
3.2焊接冷裂纹 12
3.3冲击韧性 12
3.4挖掘机动臂焊接材料、工艺方法及装备 13
3.5焊接材料选择 14
3.6工艺方法及装备 15
4挖掘机动臂焊接变形控制 15
4.1焊接变形的主要形式及产生原因 16
4.2控制焊接变形的方法 17
结论 18
致谢 19
参考文献 20
|