单自由度越障机器人设计(含CAD图,SolidWorks,IGS三维图)(论文说明书9300字,CAD图纸8张,SolidWorks三维图,IGS通用三维格式)
摘 要
机械工业是一个国家的重要产业,机械工业的发展无时不刻都在影响着国家经济的发展,人类的进步离不开机械工业的发展。在全球经济发展的大环境下,中国各个行业被其他国家的先进技术影响的同时,越来越多的外国企业和品牌传播到中国已经成为现实。在新的市场需求的推动下,对单自由度越障机器人进行改良和优化是当务之急,单自由度越障机器人的发展与人类社会的进步和科学技术的水平密切相关。
国内单自由度越障机器人的研发及制造要与全球号召的高效经济、灵活、多样等主题保持一致。近期对机器人行业中单自由度越障机器人的使用情况进行了调查,发现在机械行业中,单自由度越障机器人的使用非常普遍。自然而然在机械设备中它们的设计也非常频繁。传统的单自由度越障机器人结构单一,实现的功能有限,所以设计一个专用的单自由度越障机器人势在必行。
本文运用大学所学的知识,提出了单自由度越障机器人的结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,构建了单自由度越障机器人总的指导思想,从而得出了该单自由度越障机器人的优点是高效,经济,并且变化灵活,多样,运行平稳的结论。
关键词:发展;单自由度越障机器人;结构;高效
ABSTRACT
The environment of global economic development, China industries affected by other countries advanced technology at the same time, foreign enterprises and brand spread to more and more Chinese has become an opportunity. Cap pressing machine in industry through a variety of ways have been working with the relevant technology, and constantly improve their own strength and core competitiveness, and narrow the gap with developed countries. In the new market demand, update the sleeve pressing machine is a pressing matter of the moment. The production of pipe pressing machine equipment manufacturing enterprises to fully tap the potential of the market, vigorously develop the sleeves of large low cost pressing special machinery and equipment, plays a positive role in the evolution of automatic assembly, the assembly of mechanical equipment.
With the development of science and technology, interdisciplinary mutual infiltration, mutual exchanges between the various industry, extensive use of new structure, new materials, new technology, the sleeve pressing machine is large, efficient,
Recently, the use of machinery industry, bearing and shaft sleeve shaft were investigated, found that the shaft, bearings and bushings in the machinery industry is one of the key parts. Come very naturally in the assembly of the installation is also very simple. In the installation if the use of artificial pressure with not only the labor intensity is too large and the size of each other is not easy to ensure the shaft, bearing and shaft sleeve, so the design of a special press be imperative. Graduation project this time is a tube axial compressive loading machine. This paper introduces the theoretical calculation to design sleeve pressing machine structure, working principle and main parts of the strength check and the advantages of the sleeve, pressing machine is efficient, economical, and high safety, stable operation.
The overall plan is: the relative position of two axle sleeve on the plane, the motor reducer to provide power through belt drives the screw rod to rotate, and drives the head movement, a nut, a rotary motion of the linear motion of press. Block type safety clutch overload protection with teeth, pressure distribution in the corresponding position of the pipe after drilling through the drilling template.
Key word: pneumatic manipulator;cylinder;pneumatic loop;Four degrees of freedom目 录
摘 要 i
ABSTRACT ii
目 录 iii
1绪论 1
1.1课题的来源与研究的目的和意义 1
1.2单自由度越障机器人的发展现状 2
1.3 本课题研究的内容 4
1.4.1 草图绘制 5
1.4.2 基准特征,参考几何体的创建 6
1.4.3 拉伸、旋转、扫描和放样特征建 7
1.4.4 工程图的设计 10
1.4.5 装配设计 11
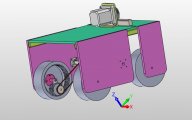
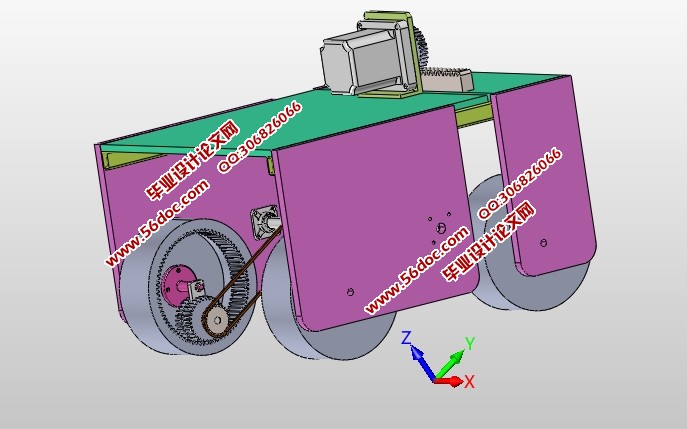
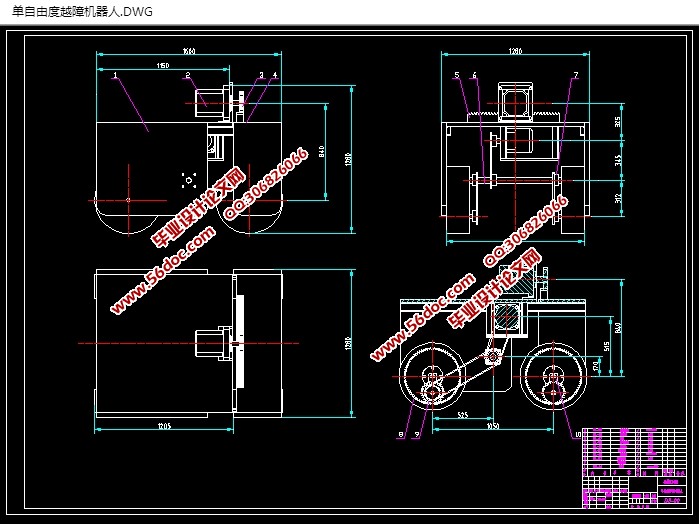
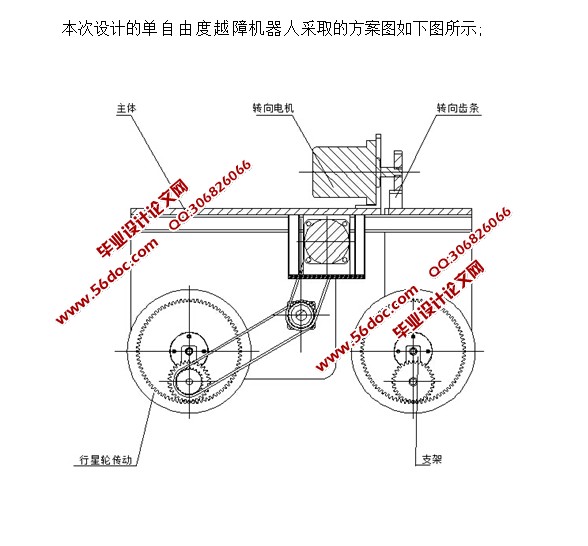
2 单自由度越障机器人总体结构的设计 12
2.1 单自由度越障机器人的总体方案图 12
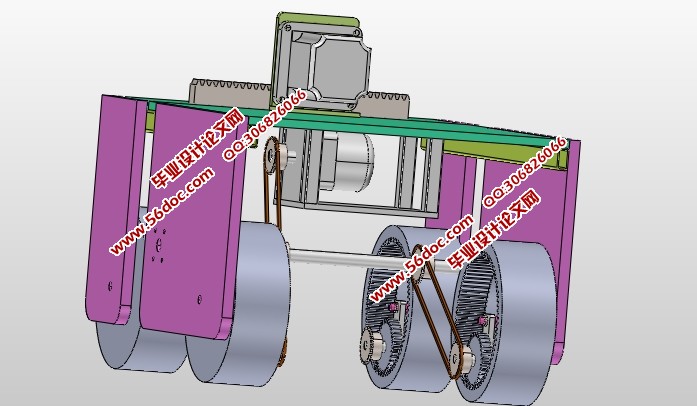
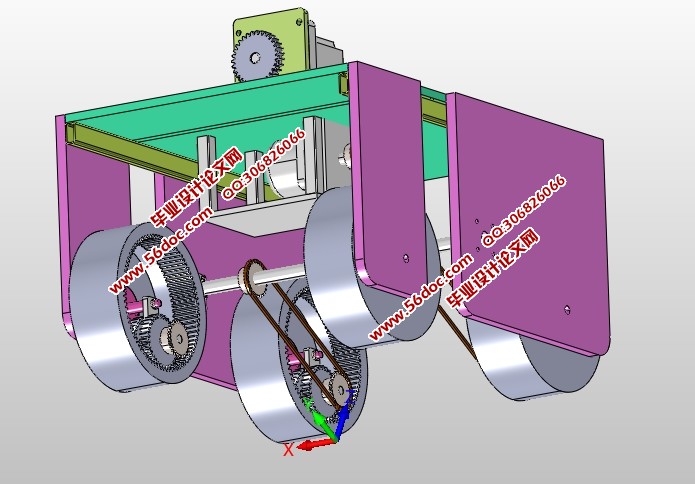
3 机械传动部分的设计计算 17
3.1电机的选型计算 18
3.2齿轮传动的设计计算 19
3.3齿轮齿条的选型计算 19
4 各主要零部件强度的校核 24
4.1转动轴强度的校核与计算 25
4.2齿轮强度的校核计算 26
结 论 26
致 谢 27
参考文献 28
附录 一 32
附录 二 40
|