ЩЈЕиЛњЦїШЫЕФЩшМЦ(КЌCADЭМ,SolidWorks,IGSШ§ЮЌЭМ)
РДдДЃК56doc.com зЪСЯБрКХЃК5D15304 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D15304
зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
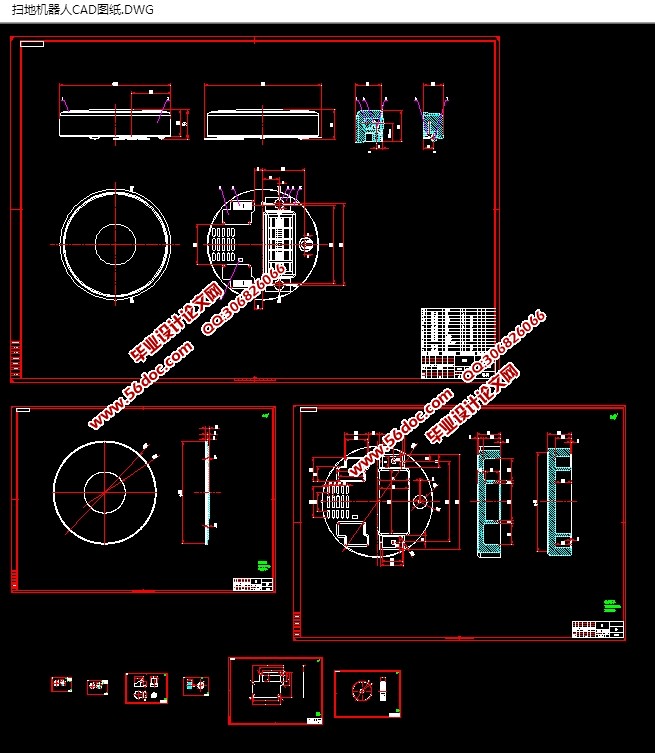
ЩЈЕиЛњЦїШЫЕФЩшМЦ(КЌCADЭМ,SolidWorks,IGSШ§ЮЌЭМ)(ТлЮФЫЕУїЪщ10000зж,CADЭМжН9еХ,SolidWorksШ§ЮЌЭМ,IGSЭЈгУШ§ЮЌИёЪН)
еЊвЊЃКЛњЦїШЫЪЧвЛжжФмЙЛФЃЗТШЫРрЖЏзїЕФЛњЦїЃЌЫќПЩвдЭъГЩаэЖрЖдШЫРрРДЫЕЮЃЯеЧвЕЅЕїЕФЙЄзїЃЌЛњЦїШЫШУШЫРрДгЗБжиЁЂЕЅЕїЕФЙЄзїжаНтЭбГіРДЁЃЫќУЧДгЪТЙЬЖЈЖјгаЙцТЩЕФЙЄзїЃЌР§ШчЙЄвЕЩњВњжаЕФКИНгЁЂХчЦсЕШЕШЁЃ
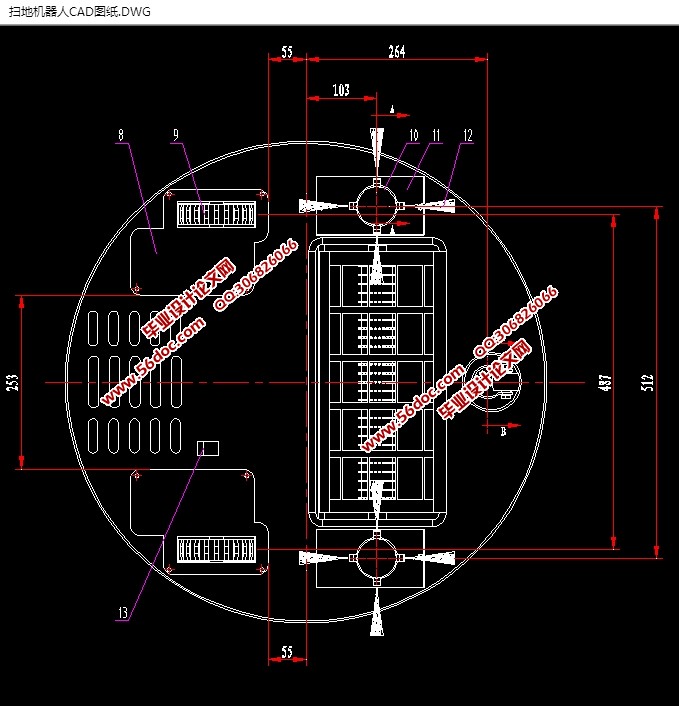
БОЮФжївЊЩшМЦЕФЪЧЩЈЕиЛњЦїШЫЕФЩшМЦЃЌИУЛњЦїШЫВЩгУЭГвЛЖЏзїЁЂаЕїПижЦЕФддђЃЌЭЈЙ§ЕчЛњДјЖЏЖЏСІТжЪЕЯжЩЈЕиЛњЦїШЫЕФдЫЖЏЃЌЭЈЙ§жаПиЯЕЭГЕФПижЦРДЪЕЯжЩЈЕиЛњЦїШЫЕФЖЏзїЃЌгЩгкЪЧжаПиЯЕЭГПижЦЃЌЫљвдПижЦСщЛюЃЌЖрбљЁЃЭЈЙ§ПижЦЦїРДПижЦЛњЦїШЫЕФЖЏзїЃЌЪЕЯжИУЛњЦїШЫЧхЩЈЁЂГ§ГОЕФЙІФмЁЃ
ЙиМќДЪЃК ЩЈЕиЛњЦїШЫЃЛПижЦЃЛНсЙЙЃЛЧхЩЈ
The design of sweeping robot
AbstractЃКThe overall scheme of this paper to the electric push rod as the main component to design manned three degree of freedom triangular robot. The mechanism adopts the unified action, the coordinated control principle, by opening the travel of the push rod to realize the robot foot movement, to achieve a manned with three degrees of freedom robot motion control in the triangle by control system, the control system to control, so the control of flexible, multi sample. People can sit on the robot, the controller is adopted to control the robot's movement, the realization of some people rely on their own to complete the function of the leg muscles.
Must regard as the machine design is the machine design personnel carries on using creative ability the product design, the system analysis and a formulation product manufacture technology good opportunity.
Key wordsЃКMachine manufacture;Crankshaft;Processing craft;Fixture;
4 ЩЈЕиЛњЦїШЫзмЬхЗНАИНсЙЙЕФЩшМЦ
4.1 ЩЈЕиЛњЦїШЫЕФзмЬхЗНАИЭМ
БОДЮЩшМЦЕФЩЈЕиЛњЦїШЫВЩШЁЕФЗНАИЪЧЃКдкЛњЦїШЫЕФСНВрИїВМжУвЛзщУЋЫЂЃЌГЩЖдГЦЗжВМЃЌЭЈЙ§ЕчЖЏЛњЭЈЙ§ЩЁГнТжДЋЖЏПижЦЖЏСІТжзЊЖЏРДЪЕЯжЛњЦїШЫЕФвЦЖЏЖЏзїЁЃИљОнПижЦЗНЗЈЕФВЛЭЌЃЌЛњЦїШЫЕФзЊЫйЛђепЗНЯђвВгаЫљВЛЭЌЁЃећЛњВЩгУГЩБОЕЭСЎЧвООУФЭгУЕФЫмСЯзїЮЊВФСЯЃЌОЙ§ХчЦсХчЫмДІРэКѓдкЭтЙлЩЯУцЕУЕНСЫвЛЖЈЕФБЃжЄЁЃЦфОпЬхЗНАИВМОжЭМШчЯТЃК
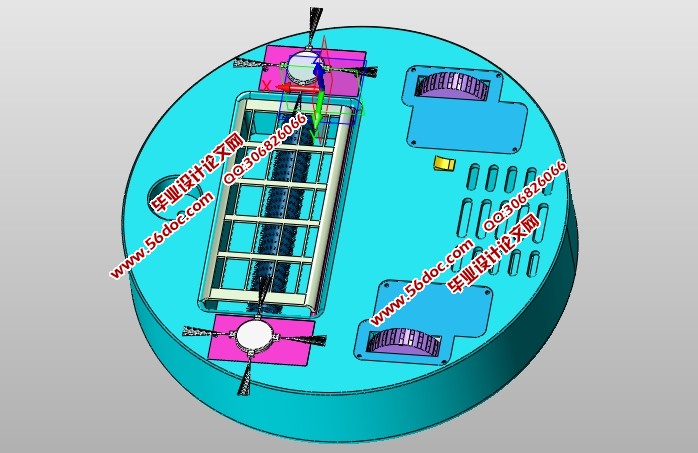
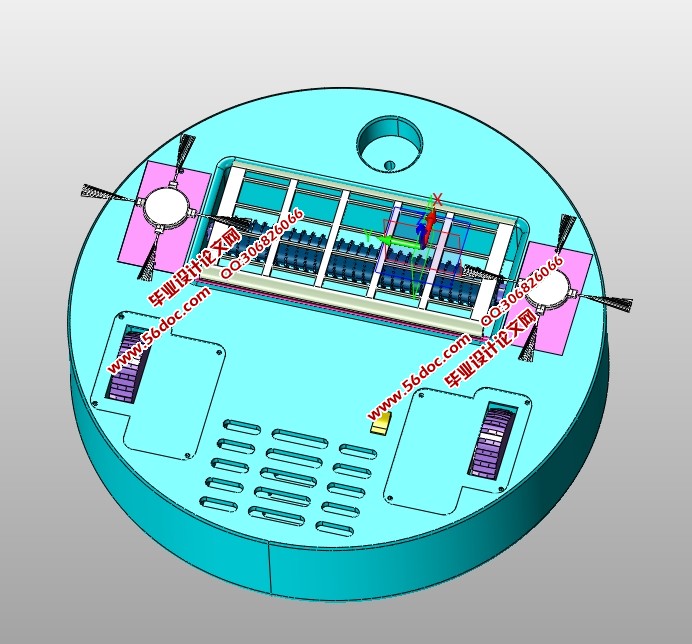
4.2 ЩЈЕиЛњЦїШЫЕФЙЄзїдРэ
БОДЮЩшМЦЕФЩЈЕиЛњЦїШЫЕФЙЄзїдРэЮЊЃКЭЈЙ§ЕчЖЏЛњЭЈЙ§ЩЁГнТжДЋЖЏПижЦЖЏСІТжзЊЖЏРДЪЕЯжЛњЦїШЫЕФвЦЖЏЖЏзїЃЌИљОнПижЦЗНЗЈЕФВЛЭЌЃЌЛњЦїШЫЕФзЊЫйЛђепЗНЯђвВгаЫљВЛЭЌЁЃ1ЁЂЧхЩЈФЃЪНЃКЫцЛњЧхЩЈЁЂТна§ЪНЧхЩЈЁЂНЛВцЧхЩЈЁЂбиБпЧхЩЈЁЂЖЈЕуЧхЩЈЁЂдЄдМЧхЩЈЕШЯрНсКЯЃЌЪЕЯжШЋЗНЮЛСЂЬхЧхЩЈЃЛ
2ЁЂжЧФмЕМКНЯЕЭГЃКЪЕЯжЖдЗПМфЕиаЮЕФжиЙЙЃЌздЖЏЙцЛЎЧхЩЈТЗЯпЃЛ
3ЁЂжЧФмАВШЋМрПиЃКЗРзВЃЌЗРЕјТфЃЌЗРВјШЦЃЌЕчГиЕчСПМрВтЃЛ
4ЁЂДДаТЙІФмЃКЛвГОСПЪЖБ№ЃЌЪЕЯжДВЕзЧхЩЈЃЌЪжЛњвЃПиФЃЪНЃЌМтЖЫЦјСїТЫГО
ММЪѕЃЌЪвФкПеЦјжЪСПМрВтгыЬсабЃЛ
5ЁЂЦфЫћЛљДЁЙІФмЃКздЖЏЗЕЛиВЂГфЕчЃЌЛвГОКаАВзАМьВщЃЌЛвГОКаШнСПЬНВт
5 ЛњаЕНсЙЙЕФЩшМЦ
5.1ЕчЛњЕФбЁаЭМЦЫу
вбжЊећИіЩЈЕиЛњЦїШЫжаСуМўЕФжиСПЃЌЮвУЧШЁзмжиСПЮЊ10KgЃЌЗЖЮЇЮЊ50mm~200mmЃЌЖЏСІТжзЊЫйЮЊ1~2r/minЁЃ
ФП ТМ
аїТл 1
1. ЛњЦїШЫМђЪЗ 3
2. гІгУЛњЦїШЫЕФвтвх 6
3. БОПЮЬтбаОПЕФФкШн 9
4. ЩЈЕиЛњЦїШЫзмЬхЗНАИНсЙЙЕФЩшМЦ 12
4.1 ЩЈЕиЛњЦїШЫЕФзмЬхЗНАИЭМ 12
4.2 ЩЈЕиЛњЦїШЫЕФЙЄзїдРэ 12
5. ЛњаЕНсЙЙЕФЩшМЦ 18
5.1ЕчЛњЕФбЁаЭМЦЫу 20
5.2ГнТжДЋЖЏЕФЩшМЦМЦЫу 20
5.3ЩЈЕиЛњЦїШЫЕФЙІФмИХЪі 20
5.3.1 ЩЈЕиЛњЦїШЫЕФЧхЩЈФЃЪН 20
5.3.2 жЧФмЕМКНЯЕЭГ 20
5.4 ГнТжЕФЧПЖШаЃКЫ 20
5.5 ЩЈЕиЛњЦїШЫЕФжЧФмПижЦЯЕЭГ 20
6. ЩЈЕиЛњЦїШЫЕФШ§ЮЌНЈФЃ 21
6.1 ЖЏСІТжЕФШ§ЮЌНЈФЃ 21
6.2 ЭђЯђТжЕФШ§ЮЌНЈФЃ 22
6.3 УЋЫЂЕФШ§ЮЌНЈФЃ 23
6.4 ЩЈЕиЛњЦїШЫЕФШ§ЮЌНЈФЃ 22
7. Ш§ЮЌШэМўЩшМЦзмНс 22
НсТл 25
ВЮПМЮФЯз 26
жТаЛ 27
|