¥σ–ΆΥΡ±Ώ–ΈΙωΕ·ΜζΤς»ΥΒΡ…ηΦΤ(Κ§CADΆΦ,SolidWorks,STEP»ΐΈ§ΆΦ)
ά¥‘¥ΘΚ56doc.com Ή Νœ±ύΚ≈ΘΚ5D15861 Ή ΝœΒ»ΦΕΘΚΓοΓοΓοΓοΓο %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D15861
Ή Νœ“‘Άχ“≥Ϋι…ήΒΡΈΣΉΦ,œ¬‘ΊΚσ≤ΜΜα”–Υ°”Γ.Ή ΝœΫωΙ©―ßœΑ≤ΈΩΦ÷°”Ο. Οή ±Θ Μί Αο÷ζ
Ή ΝœΫι…ή
¥σ–ΆΥΡ±Ώ–ΈΙωΕ·ΜζΤς»ΥΒΡ…ηΦΤ(Κ§CADΆΦ,SolidWorks,STEP»ΐΈ§ΆΦ)(¬έΈΡΥΒΟς ι17000Ή÷,CADΆΦ÷Ϋ9’≈,SolidWorks»ΐΈ§ΆΦ,STEPΆ®”Ο»ΐΈ§Ηώ Ϋ)
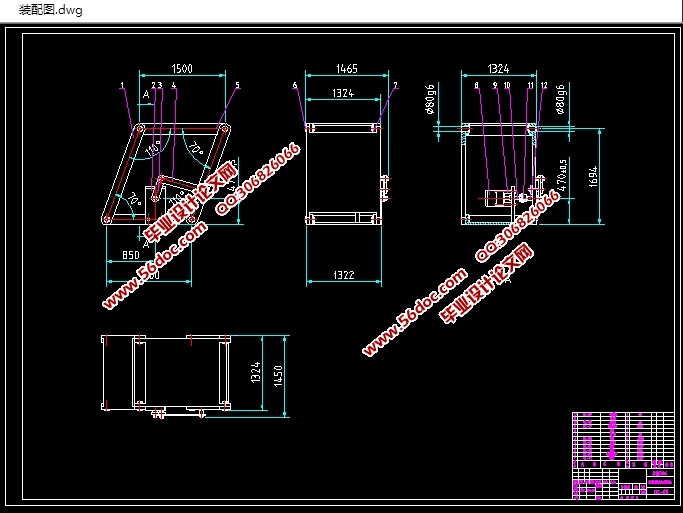
±Ψ±œ“Β…ηΦΤΒΡΡΩ±ξ «…ηΦΤ“Μ÷÷¥σ–ΆΥΡ±Ώ–ΈΙωΕ·ΜζΙΙΘ§ΗΟΜζΙΙ≥Ώ¥γΈΣ¥σ–ΆΘ§άϊ”Ο»ΥΧε≤ΌΉς Βœ÷ΜζΙΙ‘ΥΕ·ΒΡΩΊ÷ΤΓΘ≤…”ΟΥΡΗΥΜζΙΙΉςΈΣ…ηΦΤΜυ¥ΓΘ§Ά®ΙΐΜζΙΙ…ηΦΤ”κΖ¬’φ…ηΦΤ Βœ÷ΙωΕ·ΙΠΡήΓΘ
ΙΊΦϋ¥ ΘΚ¥σ–ΆΥΡ±Ώ–ΈΙωΕ·ΜζΤς»ΥΘΜΫαΙΙΘΜΥΡΗΥΜζΙΙΘΜ«ζ±ζ“ΓΗΥ
¥σ–ΆΥΡ±Ώ–ΈΙωΕ·ΜζΤς»ΥΉήΧεΖΫΑΗΫαΙΙΒΡ…ηΦΤ
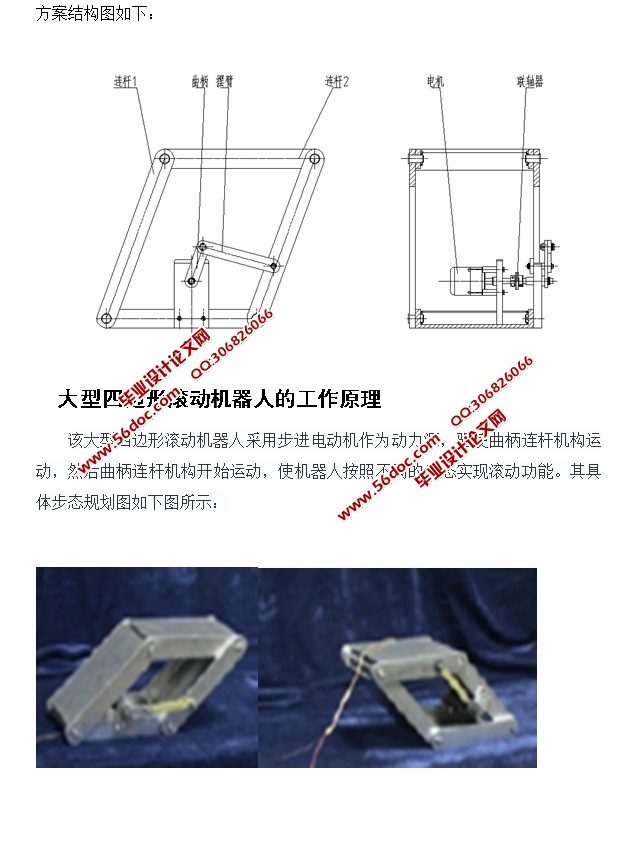
±Ψ¥Έ…ηΦΤΒΡ¥σ–ΆΥΡ±Ώ–ΈΙωΕ·ΜζΤς»Υ≤…»ΓΒΡΖΫΑΗ «ΘΚ≤…”ΟΧΦΗ÷ΑεΆ®Ιΐœζ÷αΝ§Ϋ”ΒΡΖΫ Ϋά¥÷ΤΉς÷ςΧεΘ§÷ςΧεάοΟφΑ≤ΉΑ≤ΫΫχΒγΕ·ΜζΉςΈΣΕ·ΝΠ‘¥Θ§«ΐ Ι«ζ±ζΝ§ΗΥΜζΙΙ‘ΥΕ·Θ§»ΜΚσ«ζ±ζΝ§ΗΥΜζΙΙΩΣ Φ‘ΥΕ·Θ§ ΙΒΟΈ“ΒΡΜζΤς»ΥΒΡ≤Ϋ––ΙΠ–ßΒΟ“‘ Βœ÷Θ§ΤδΨΏΧεΖΫΑΗΫαΙΙΆΦ»γœ¬ΘΚ
¥σ–ΆΥΡ±Ώ–ΈΙωΕ·ΜζΤς»ΥΒΡΙΛΉς‘≠άμ
ΗΟ¥σ–ΆΥΡ±Ώ–ΈΙωΕ·ΜζΤς»Υ≤…”Ο≤ΫΫχΒγΕ·ΜζΉςΈΣΕ·ΝΠ‘¥Θ§«ΐ Ι«ζ±ζΝ§ΗΥΜζΙΙ‘ΥΕ·Θ§»ΜΚσ«ζ±ζΝ§ΗΥΜζΙΙΩΣ Φ‘ΥΕ·Θ§ ΙΜζΤς»ΥΑ¥’’≤ΜΆ§ΒΡ≤ΫΧ§ Βœ÷ΙωΕ·ΙΠΡήΓΘ
ΡΩ ¬Φ
’Σ “Σ i
ABSTRACT ii
ΡΩ ¬Φ iii
1–ς¬έ 1
1.1ΩΈΧβά¥άζ”κ―–ΨΩΒΡΡΩΒΡ“‘ΦΑ“β“ε 1
1.2¥σ–ΆΥΡ±Ώ–ΈΙωΕ·ΜζΤς»ΥΒΡΖΔ’Ιœ÷Ή¥ 2
1.3±ΨΩΈΧβ―–ΨΩΒΡΡΎ»ί 5
1.4 ΗΟΜζΤς»ΥΒΡSolidworks…ηΦΤ 7
1.4.1 ≤ίΆΦΜφ÷Τ 9
1.4.2 ΜυΉΦΧΊ’ςΘ§≤ΈΩΦΦΗΚΈΧεΒΡ¥¥Ϋ® 10
1.4.3 ά≠…λΓΔ–ΐΉΣΓΔ…®ΟηΚΆΖ≈―υΧΊ’ςΫ® 11
1.4.4 ΙΛ≥ΧΆΦΒΡ…ηΦΤ 12
1.4.5 ΉΑ≈δ…ηΦΤ 12
2 ¥σ–ΆΥΡ±Ώ–ΈΙωΕ·ΜζΤς»ΥΉήΧεΖΫΑΗΫαΙΙΒΡ…ηΦΤ 12
2.1 ¥σ–ΆΥΡ±Ώ–ΈΙωΕ·ΜζΤς»ΥΒΡΉήΧεΖΫΑΗΆΦ 12
2.2 ¥σ–ΆΥΡ±Ώ–ΈΙωΕ·ΜζΤς»ΥΒΡΙΛΉς‘≠άμ 12
3 Μζ–Β¥ΪΕ·ΒΡ…ηΦΤΦΤΥψ 16
3.1 Υ≈ΖΰΒγΜζΒΡ―Γ–ΆΦΤΥψ 16
3.2 ¥ΪΕ·÷αΒΡ…ηΦΤΦΤΥψ 17
3.3 ÷α≥–ΒΡ…ηΦΤΦΤΥψ 17
4 ÷ς“ΣΝψ≤ΩΦΰΒΡ«ΩΕ»–ΘΚΥ 18
4.1 ¥ΪΕ·÷α«ΩΕ»ΒΡ–ΘΚΥ 19
4.2 ÷α≥–«ΩΕ»ΒΡ–ΘΚΥΦΤΥψ 19
Ϋα¬έ 19
÷¬ –Μ 20
≤ΈΩΦΈΡœΉ 21
ΗΫ¬Φ “Μ 32
ΗΫ¬Φ Εΰ 40
|