一种便携式侦查机器人的研究(含CAD零件装配图,SolidWorks,IGS三维图)
来源:56doc.com 资料编号:5D15885 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D15885
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
一种便携式侦查机器人的研究(含CAD零件装配图,SolidWorks,IGS三维图)(论文说明书17000字,CAD图纸7张,SolidWorks三维图,IGS通用三维格式)
国内便携式侦查机器人的研发及制造要与全球号召的高效经济、灵活、多样等主题保持一致。近期对机器人行业中便携式侦查机器人的使用情况进行了调查,发现在机械行业中,便携式侦查机器人的使用非常普遍。自然而然在机械设备中它们的设计也非常频繁。传统的便携式侦查机器人结构单一,实现的功能有限,所以设计一个专用的便携式侦查机器人势在必行。
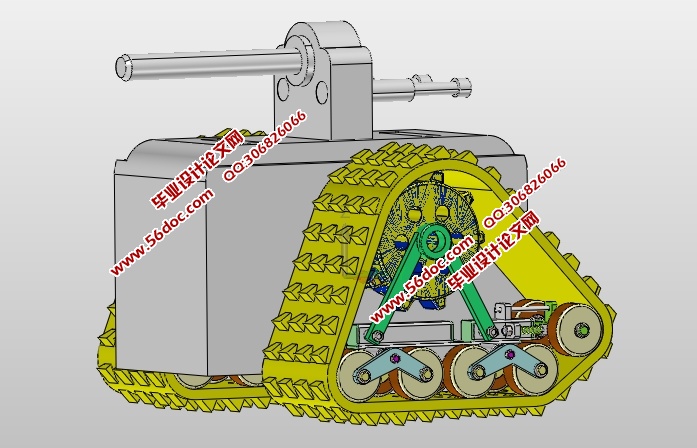
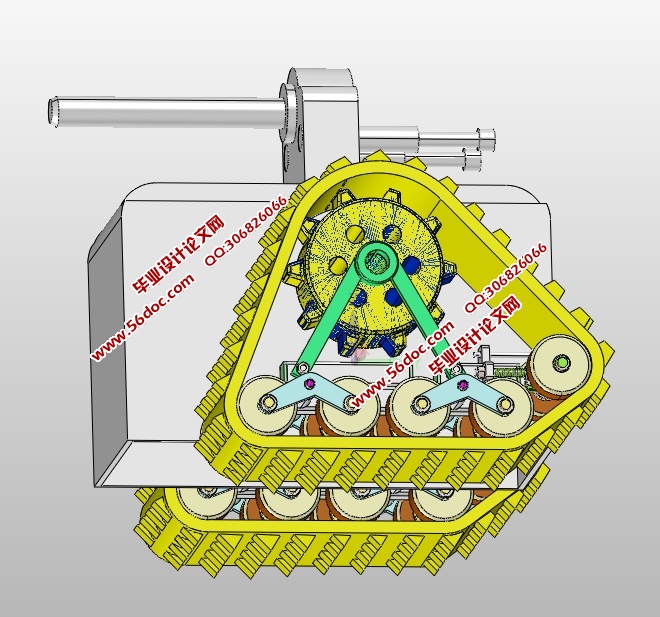
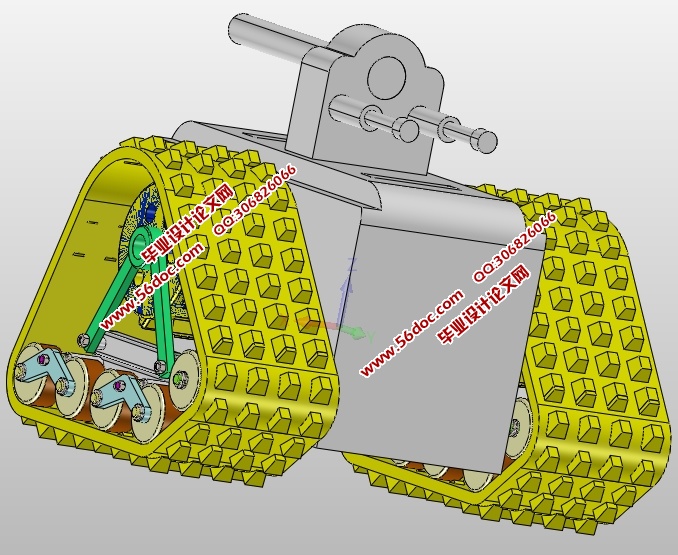
本文运用大学所学的知识,提出了便携式侦查机器人的结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,构建了便携式侦查机器人总的指导思想,从而得出了该便携式侦查机器人的优点是高效,经济,并且变化灵活,多样,运行平稳的结论。
关键词:机械工业;结构;便携式侦查机器人;结论
本论文主要研究运用SolidWorks对便携式侦查机器人进行设计。在设计过程中,了解便携式侦查机器人的结构特征和三维软件的使用要领。主要研究内容分为以下几个方面:
(1)便携式机器人的方案分析和确定;
(2)对确定好方案的机器人进行标准件的选型及设计计算;
(3)利用SOLIDWORKS绘制三维装配图和零件图;
(4)编写设计说明
目 录
摘 要 i
ABSTRACT ii
目 录 iii
1绪论 1
1.1 课题的来源与研究的目的和意义 1
1.2便携式侦查机器人的发展现状 2
1.3 便携式侦查机器人的研究趋势 3
1.4 Solidworks设计基础 4
1.4.1 草图绘制 5
1.4.2 基准特征,参考几何体的创建 6
1.4.3 拉伸、旋转、扫描和放样特征建 7
1.4.4 工程图的设计 10
1.4.5 装配设计 11
2 便携式侦查机器人总体结构的设计 12
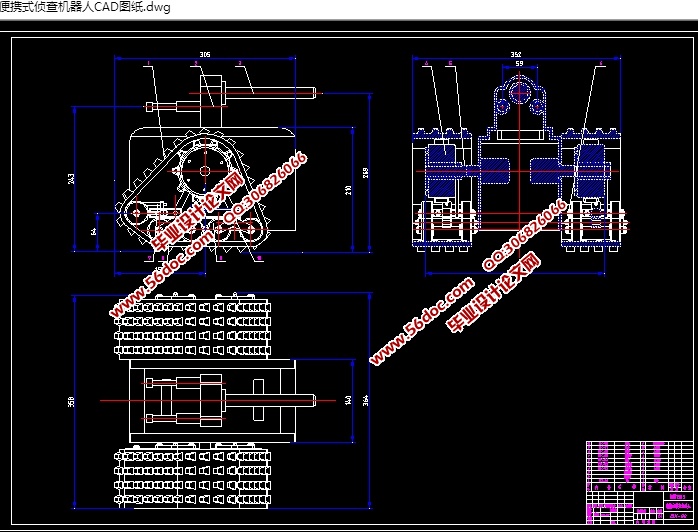
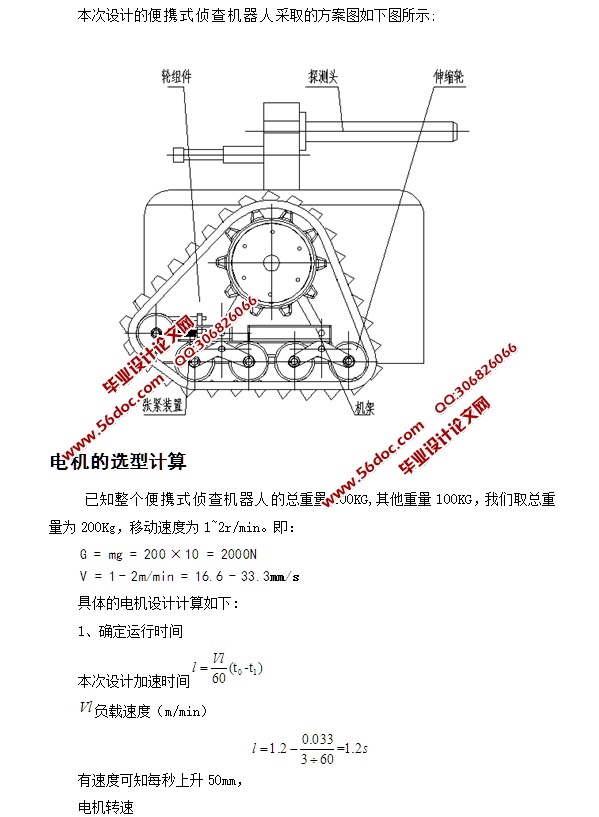
2.1 便携式侦查机器人的总体方案图 12
3 机械传动部分的设计计算 17
3.1电机的选型计算 18
3.2转动轴的设计计算 19
3.3轴承的选型计算 19
4 各主要零部件强度的校核 21
4.1转动轴强度的校核与计算 21
4.2轴承强度的校核计算 22
结 论 22
致 谢 23
参考文献 24
附录 一 32
附录 二 38
|