载人三自由度三角形机器人的设计与研究(含CAD图,SolidWorks三维图)
来源:56doc.com 资料编号:5D15889 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D15889
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
载人三自由度三角形机器人的设计与研究(含CAD图,SolidWorks三维图)(论文说明书18000字,CAD图纸10张,SolidWorks三维图)
机器人是一种能够模仿人类动作的机器,它可以完成许多对人类来说危险且单调的工作,机器人让人类从繁重、单调的工作中解脱出来。它们从事固定而有规律的工作,例如工业生产中的焊接、喷漆等等。
本文主要以电动推杆作为主要执行元件来设计载人三自由度三角形机器人的整体方案。该机构采用统一动作、协调控制的原则,通过推杆的行程的打开来实现机器人脚的运动,通过中控系统的控制来实现载人三自由度三角形机器人的动作,由于是中控系统控制,所以控制灵活,多样。人可以坐在机器人上面,通过控制器来控制机器人的动作,实现一些人类靠自己脚力无法完成的功能。
关键词:机器人;工作;控制;三自由度三角形机器人
本课题研究的内容
本论文主要研究运用SolidWorks对载人三自由度三角形机器人进行设计。在设计过程中,了解载人三自由度三角形机器人的结构特征和三维软件的使用要领。
本文的设计目标是设计一种载人三自由度三角形机器人。该机器人能够载人行驶,能够实现步行,载人载物等等多种功能,其研究内容包括:
(1)功能分析与方案设计;
(2)结构设计与三维造型;
(3)运动仿真;
(4)控制系统设计。
2 载人三自由度三角形机器人总体方案结构的设计
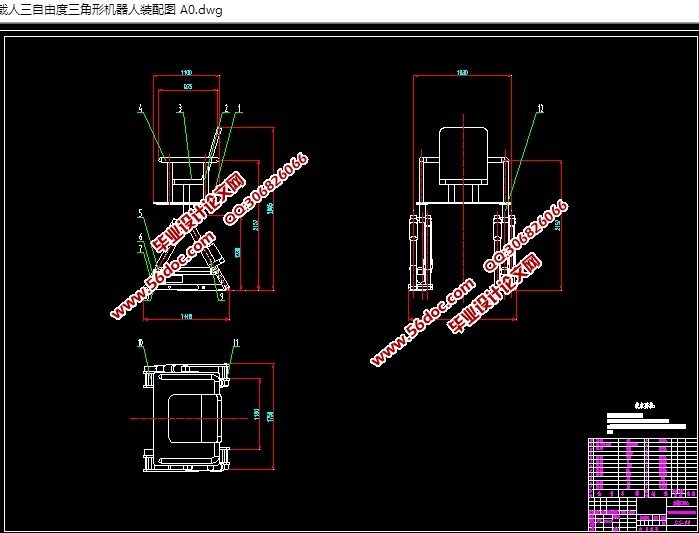
2.1 载人三自由度三角形机器人的总体方案图
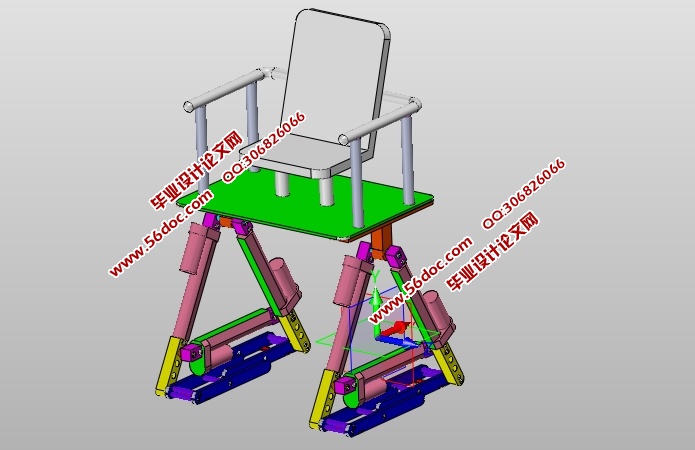
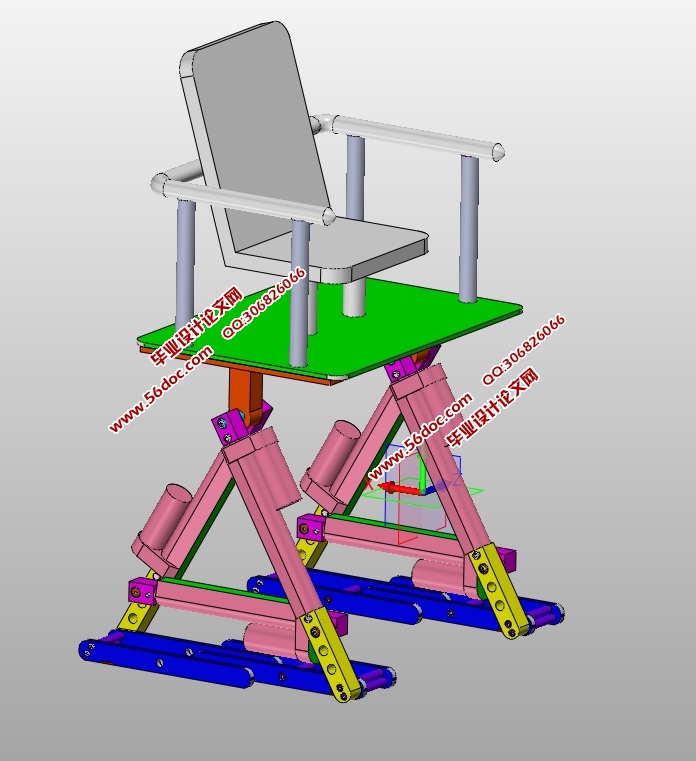
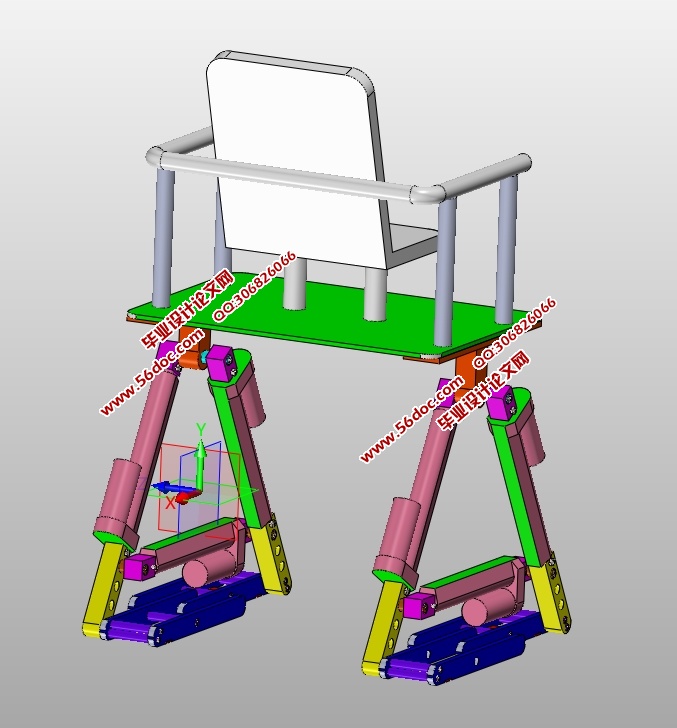
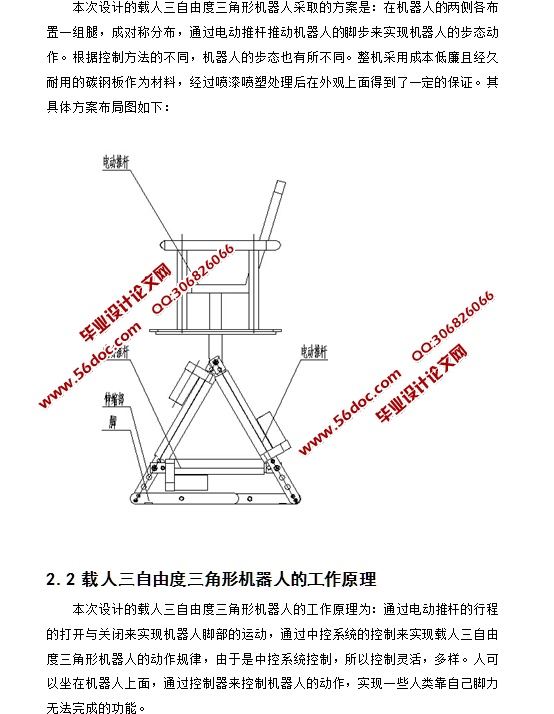
本次设计的载人三自由度三角形机器人采取的方案是:在机器人的两侧各布置一组腿,成对称分布,通过电动推杆推动机器人的脚步来实现机器人的步态动作。根据控制方法的不同,机器人的步态也有所不同。整机采用成本低廉且经久耐用的碳钢板作为材料,经过喷漆喷塑处理后在外观上面得到了一定的保证。其具体方案布局图如下:
2.2 载人三自由度三角形机器人的工作原理
本次设计的载人三自由度三角形机器人的工作原理为:通过电动推杆的行程的打开与关闭来实现机器人脚部的运动,通过中控系统的控制来实现载人三自由度三角形机器人的动作规律,由于是中控系统控制,所以控制灵活,多样。人可以坐在机器人上面,通过控制器来控制机器人的动作,实现一些人类靠自己脚力无法完成的功能。
目 录
摘 要 i
ABSTRACT ii
目 录 iii
1 绪论 1
1.1 机器人简史 3
1.2 应用机器人的意义 6
1.3 本课题研究的内容 9
2 载人三自由度三角形机器人总体方案结构的设计 12
2.1 载人三自由度三角形机器人的总体方案图 12
2.2 载人三自由度三角形机器人的工作原理 12
3 机械结构的设计 13
3.1电动推杆的定义 14
3.2电动推杆的主要结构 15
3.3电动推杆的设计计算 16
3.4 连接轴的设计 17
4 各主要零部件强度的校核 18
4.1 连接轴轻度的校核 19
4.2 底板强度的校核 19
5 载人三自由度三角形机器人的三维建模 20
5.1 电动推杆的三维建模 23
5.2 支板的三维建模 24
5.3 安全栏的三维建模 25
5.4 载人三自由度三角形机器人的三维建模 25
6 三维软件设计总结 26
结论 28
致 谢 29
参考文献 38
附录 一 32
附录 二 42
|