自动堆垛式载运机器人的设计(CAD图,SolidWorks,STEP,IGS三维图)
来源:56doc.com 资料编号:5D16012 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D16012
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
自动堆垛式载运机器人的设计(CAD图,SolidWorks,STEP,IGS三维图)(论文说明书9000字,CAD图纸10张,SolidWorks三维图,x_t,STEP,IGS通用三维格式)
The design of potato peeler
摘要
本文运用大学所学的知识,提出了自动堆垛式载运机器人的结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,构建了自动堆垛式载运机器人总的指导思想,从而得出了该自动堆垛式载运机器人的优点是高效,经济,并且安全系数高,对提高货物搬运以及装配效率,减少人工投入等等起到了很大的作用的结论。
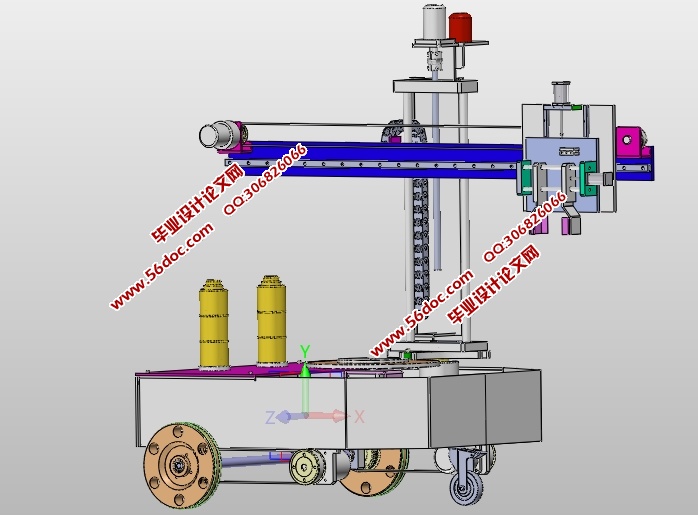
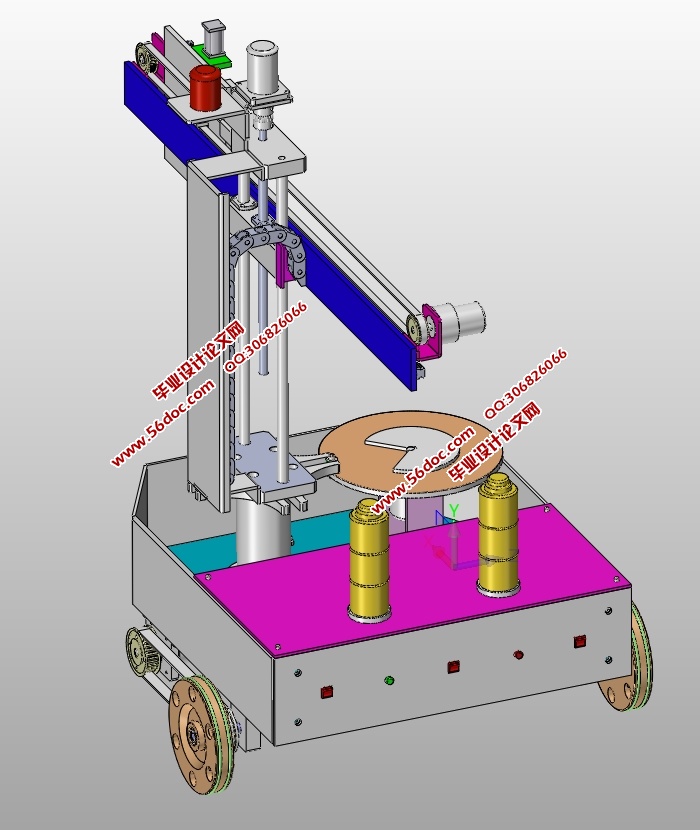
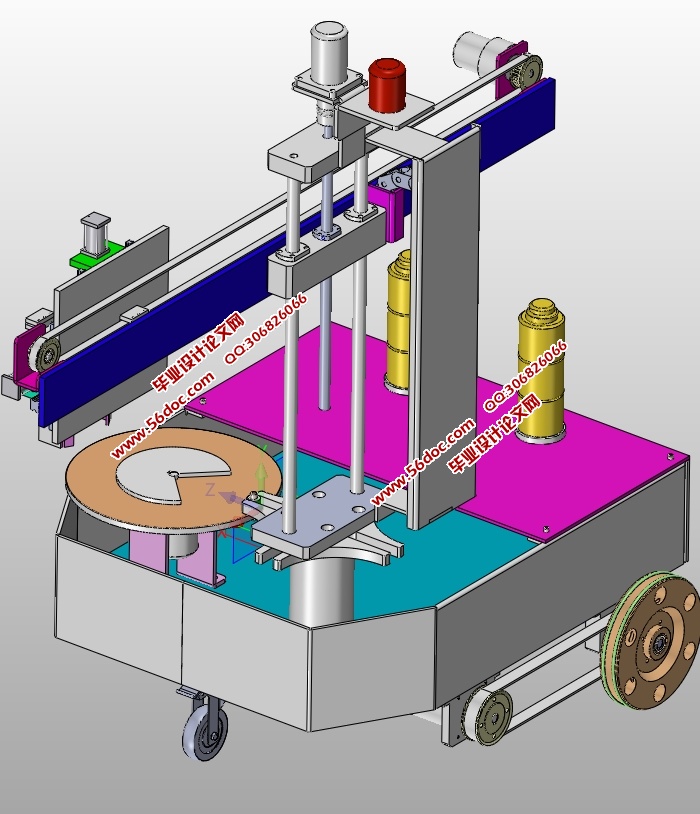
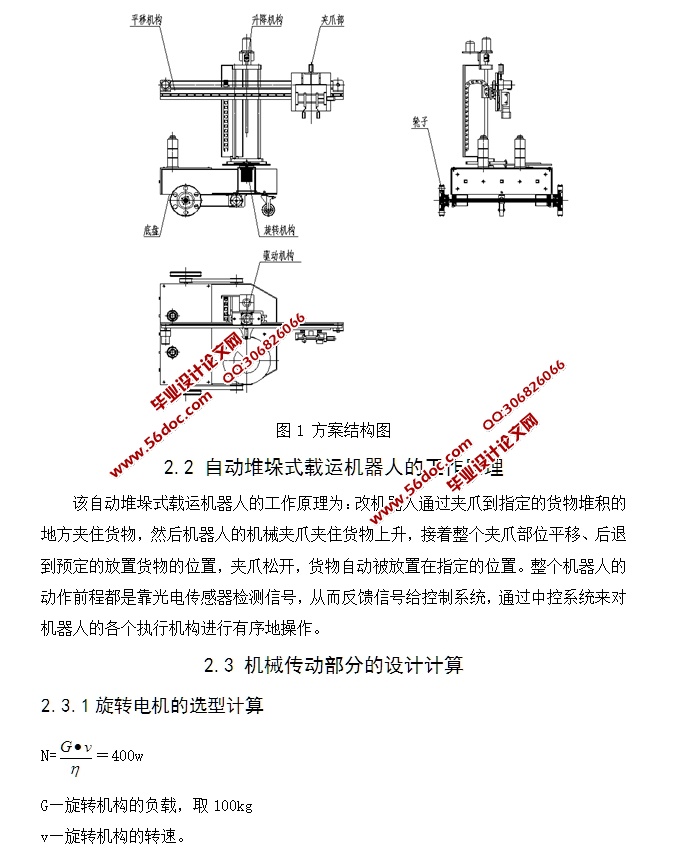
该自动堆垛式载运机器人是对传统的多自由度机器人的工作原理进行理解,本机器人由底盘、回转机构、升降机构、平移机构、手爪和驱动机构组成。该机器人能实现多个自由度,从而可以从多方位多角度来对货物进行搬运和卸载。
关键词:自动堆垛式载运机器人;计算;自由度;驱动机构;搬运
2 自动堆垛式载运机器人结构的设计
2.1自动堆垛式载运机器人总体方案图
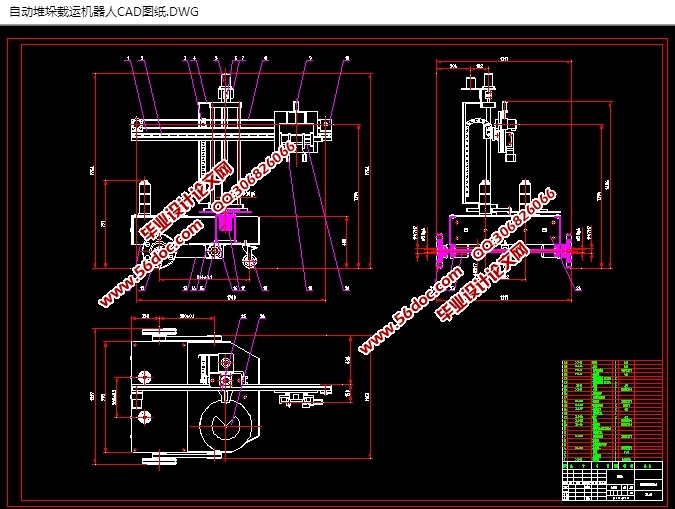
本次设计的自动堆垛式载运机器人能够实现抓取货物旋转,升降等功能。通过夹爪到指定的货物堆积的地方夹住货物,然后机器人的机械夹爪夹住货物上升,接着整个夹爪部位平移、后退到预定的放置货物的位置,夹爪松开,货物自动被放置在指定的位置。整个机器人的动作前程都是靠光电传感器检测信号,从而反馈信号给控制系统,通过中控系统来对机器人的各个执行机构进行有序地操作。
2.2 自动堆垛式载运机器人的工作原理
该自动堆垛式载运机器人的工作原理为:改机器人通过夹爪到指定的货物堆积的地方夹住货物,然后机器人的机械夹爪夹住货物上升,接着整个夹爪部位平移、后退到预定的放置货物的位置,夹爪松开,货物自动被放置在指定的位置。整个机器人的动作前程都是靠光电传感器检测信号,从而反馈信号给控制系统,通过中控系统来对机器人的各个执行机构进行有序地操作。
目 录
摘要 I
Abstract II
1 绪论 1
1.1本课题研究的内容 1
1.2 机器人概述 2
1.3 机器人的组成和分类 3
1.3.1机器人的组成 3
1.3.2机器人的分类 4
2 自动堆垛式载运机器人结构的设计 5
2.1自动堆垛式载运机器人总体方案图 7
2.2 自动堆垛式载运机器人的工作原理 9
2.3 机械传动部分的设计计算 10
2.3.1旋转电机的选型计算 10
2.3.2夹爪升降气缸的选型计算 10
2.3.3轴承的选型计算 11
2.3.4 滚动导轨的设计 12
3 各主要零件部强度的校核计算 12
3.1 键的设计及危险截面校核 13
3.2 轴承的选取及校核 14
3.3 螺栓的校核 14
4 机器人的PLC控制系统设计 15
4.1可编控制器的选择 16
4.2可编程控制器的使用步骤 17
结 论 18
致 谢 19
参考文献 20
|