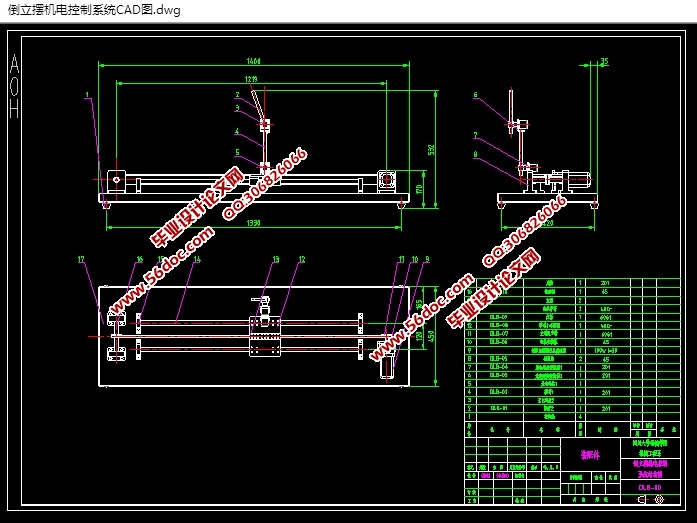
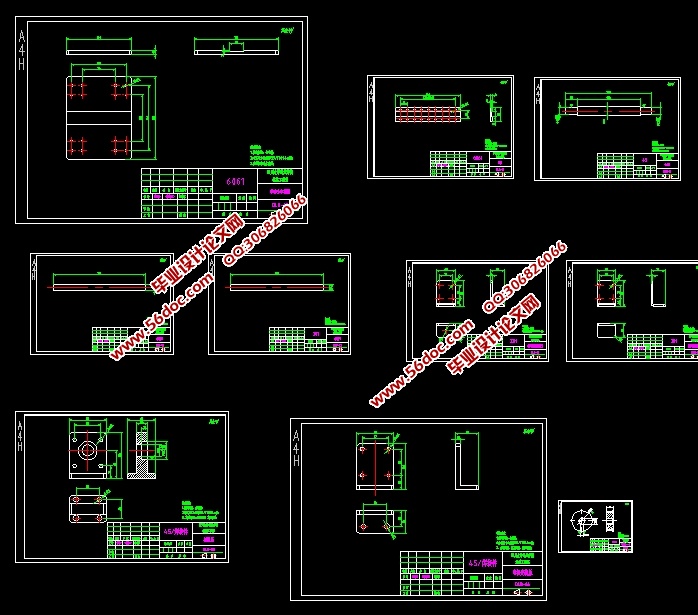
倒立摆机电控制系统结构设计(含CAD零件装配图,SolidWorks三维图)(论文说明书12000字,CAD图纸12张,SolidWorks三维图)
摘 要
随着现代科学技术的快速发展,控制工程所面临的问题越来越复杂。许多系统具有严重非线性、模型不确定、大滞后等特点。倒立摆就是这样的复杂系统,对它的研究具有一般性。倒立摆源于火箭发射器,最初的研究开始于二十世纪50 年代,由美国麻省理工学院的控制理论专家根据火箭发射助推器原理设计出一级倒立摆实验设备。倒立摆的控制技巧同杂技运动员倒立平衡表演有异曲同工之处,这表明一个不稳定的被控对象,通过人的直觉、采取定性的手段,可以使之具有良好的稳定性。在控制理论的发展过程中,某一理论的正确性及其在实际应用中的可行性需要一个按其理论设计的控制器去控制一个典型对象来验证。倒立摆系统作为一个实验装置,形象直观,结构简单,成本低廉;作为一个控制对象,他又相当复杂,同时就其本身而言,是一个高阶次、不稳定、多变量、非线性、强耦合系统,只有采取行之有效的控制方法才能使之稳定,因此倒立摆装置被公认为是自动控制理论中的典型实验设备。
通过对倒立摆系统的研究,不仅可以解决控制中的理论问题,还能将控制理论所涉及的三个基础学科:力学、数学和电学有机的结合起来,在倒立摆系统中进行综合应用。对倒立摆系统进行控制,其稳定效果非常明了,可以通过角度、位移和稳定时间直接度量,控制好坏一目了然。理论是工程的先导,对倒立摆的研究不仅有其深远的理论意义,还有重要的工程背景。从日常生活中所见到的任何重心在上,支点在下的控制问题,到空间飞行器和各类伺服云台的稳定,都和倒立摆的控制有很大的相似性,故对其的稳定控制在实际中有很多用场,如海上钻井平台的稳定控制、卫星发射架的稳定控制、火箭姿态控制、飞机安全着陆化工过程控制等都属于这类问题。针对上面的实际问题,启发了人们采用智能控制方法对倒立摆进行控制因此对倒立摆机理的研究具有重要的理论和实际意义,成为控制理论中经久不衰的研究课题。
关键词:倒立摆系统 控制对象 强耦合系统 变量
Inverted pendulum electromechanical control system structure design specification
absraote
Pneumatic manipulator is a automated devices that can mimic the human hand and arm movements to do something,aslo can according to a fixed procedure to moving objects or control tools. It can replace the heavy labor in order to achieve the production mechanization and automation, and can work in dangerous working environments to protect the personal safety, Therefore widely used in machine building, metallurgy, electronics, light industry and atomic energy sectors.
This article is mainly of the pneumatic manipulator the overall design, and pneumatic design. This mechanism of manipulator includes cylinders and claws and connectors parts, it can move according to the due track on the movement of grabbing, carrying and unloading. The pneumatic part of the design is primarily to choose the right valves and design a reasonable pneumatic control loop, by controlling and regulating pressure, flow and direction of the compressed air to make it get the necessary strength, speed and changed the direction of movement in the prescribed procedure work.
The inverted pendulum is a typical high order system, with multi- variable, non-linear,
strong-coupling, fleet and absolutely instable. It is representative as an ideal model to prove new control theory and techniques. During the control process, pendulum can effectively reflect many key problems such as equanimity, robust, follow-up and track, therefore.This paper studies a control method of double inverted pendulum LQR. First of all, the mathematical model of the double inverted pendulum is established, then make a control design to double inverted pendulum on the mathematical model, and determine the system performance index weight matrix Q, R by using genetic algorithm in order to attain the system
state feedback control matrix. Finally, the simulation of the system is made by MATLAB. After several test matrix Q value the results are not satisfactory response, then we optimize Q matrix by using Genetic Algorithm. Simulation results show: The system response can meet the design requirements effectively after Genetic Algorithm optimization.
Small twisted paper broken machine for ordinary home, not only can be used for minced meat, can also be used with crushed peanuts, crushed ice, spices and other food, small power requirements, powered by the motor drive, reasonable structure design, can meet the family kitchen generally meat food consisting mainly of minced required.
Key word: pneumatic manipulator;cylinder;pneumatic loop;Four degrees of freedom.
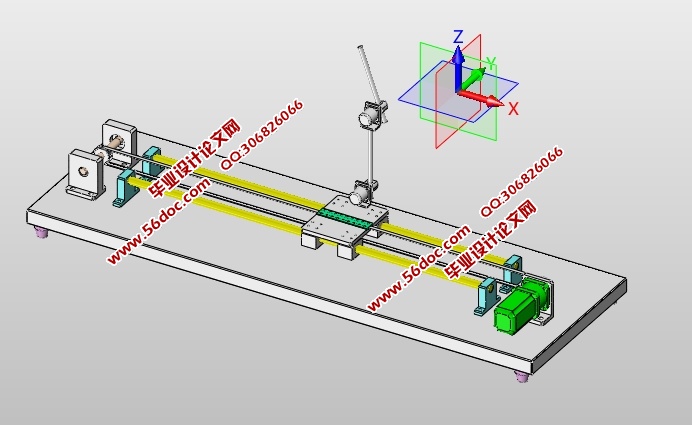
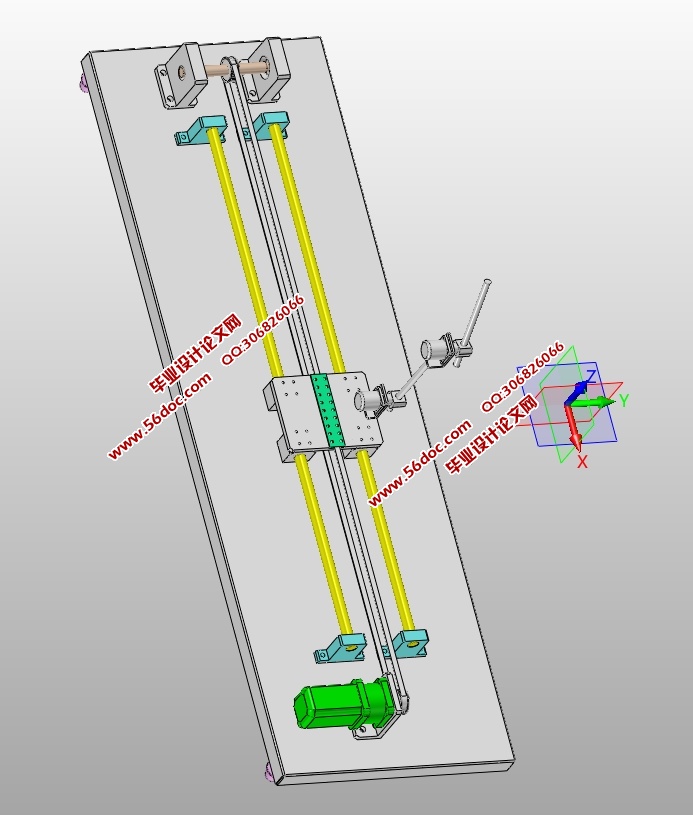
倒立摆系统的工作原理
倒立摆系统通过计算机、I/O卡、伺服系统、倒立摆本体和光电码盘反馈测量元件组成一个闭环系统。以直线一级倒立摆为例,其工作原理框图如下图所示。图中光电码盘1由伺服电机自带,小车的位移可以根据该码盘的反馈通过换算获得,速度信号可以通过对位移的差分得到。各个摆杆的角度由光电码盘2测量并直接反馈到I/O卡,而角速度信号可以通过对角度的差分得到。计算机从I/O卡实时读取数据,确定控制决策(电机的输出力矩),并发给I/O卡。I/O卡经过电控箱内部电路产生相应的控制量,驱动电机转动,使小车按控制要求进行运动,以达到控制目的。
对于二级或更多级数的倒立摆,需要相应增加光电码盘以检测各摆杆的角 度。实际系统配置中,可以根据需要自行配置I/O卡、伺服电机和伺服驱动器
。
目录
摘要..........................................................................................................2
Abstract................................................................................................2
第一章 引言...........................................................................................3
1.1 课题的研究背景和意义.......................................................................4
1.2倒立摆机电控制系统的国内外研究概况..................................................4
1.3倒立摆系统简介..................................................................................4
1.3.1倒立摆系统的分类.........................................................................5
1.3.2倒立摆系统的特点.........................................................................5
1.3.3倒立摆系统框图............................................................................6
1.4倒立摆系统的工作原理......................................................................6
第二章倒立摆机电控制系统结构的总体设计.................................7
2.1 倒立摆机电控制系统结构的功能需求....................................................8
2.2 系统实现结构图.................................................................................9
第三章倒立摆机电控制系统结构设计............................................10
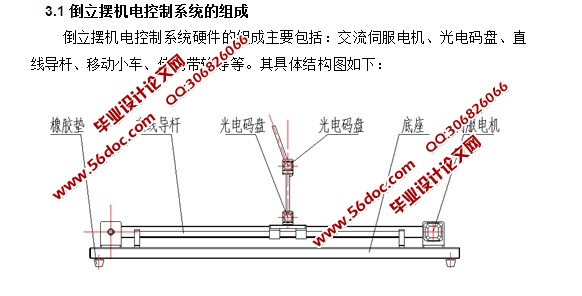
3.1控制系统的构成.................................................................................11
3.2控制系统硬件电路核心元件的选择....................................................11
3.2.1伺服电机的工作原理及选型计算..................................................12
3.2.2伺服电机的工作原理..................................................................12
3.2.3伺服电机的选型计算..................................................................13
3.3光电码盘的工作原理及作用................................................................13
3.3.1光电码盘的工作原理..................................................................14
3.3.2光电码盘的作用........................................................................16
3.4直线导杆的选择................................................................................17
3.5同步带轮传动的选择计算...................................................................20
第四章倒立摆机电控制系统中PID的控制算法的实现..............22
4.1PID控制算法简介..............................................................................25
4.1.2PID控制各部分的特点.................................................................27
4.1.3PID控制器各部分参数的选定........................................................29
4.2PID控制算法的实现...........................................................................29
结论........................................................................................................30
致谢........................................................................................................31
参考文献................................................................................................32
|