四自由度棒料搬运机械手设计(含CAD图)
来源:56doc.com 资料编号:5D17391 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D17391
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
四自由度棒料搬运机械手设计(含CAD图)(含选题审批表,任务书,开题报告,中期检查表,论文说明书13000字,CAD图纸4张)
摘 要: 本设计的机械手是基于提高劳动生产率、产品质量和经济效益,减轻工人劳动强度而设计的。在某些劳动条件极其恶劣的条件下,工人难以用手工工作,可用本机械手代替人力劳动。
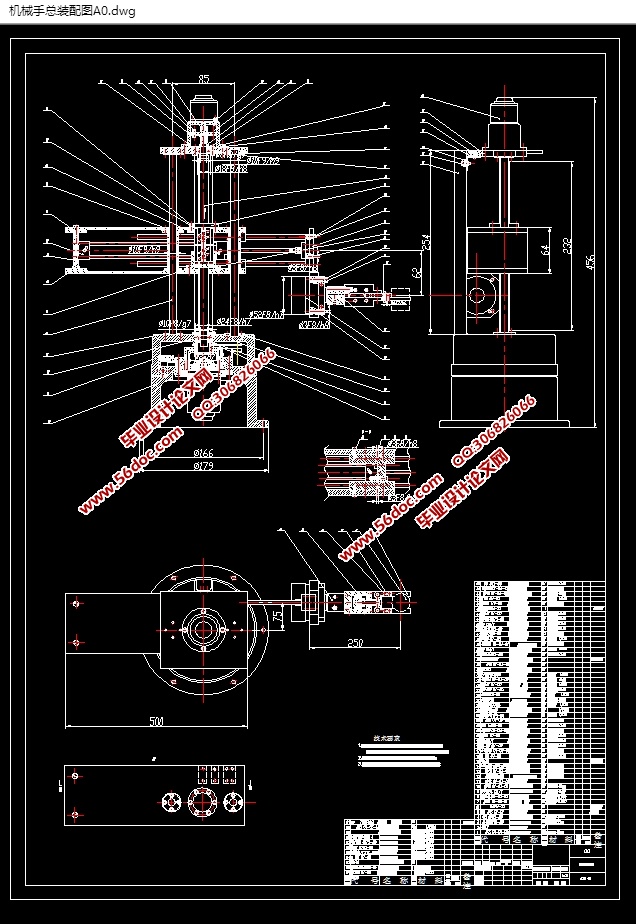
本设计为四自由度圆柱坐标型工业机械手,其工作方向为两个直线方向和两个旋转方向。
本设计中的四自由度棒料搬运机械手,主要是针对质量少于2KG的圆形棒料的搬运。通过气爪手指的不同选择可满足直径小于60mm的棒料的搬运。在控制器的作用下,机械手执行将工件从一条流水线拿到另一条流水线并把工件翻转过来这一简单的动作.
关键词:四自由度;机械手;搬运;工业机器人
The Four Degrees-of-freedom Bar Manipulator Designs
Abstract:This paper design for enhances the labor productivity, product quality, economic efficiency and reduces the worker labor intensity. Some job working at extremely bad environment, that people can’t work in hand, so the robots can replace worker to do it.
This scheme introduced a cylindrical robot for four degree of freedom. It is composed of two linear axes and two rotary axis current
This paper mainly use at the transporting of circular good material that quality is short to 2KG. The different fingernail finger was Choice for transporting the good material that diameter is smaller than 60mm.Under controller function the robot move the components from one assembly line to other assembly line and turn over it in space, perform relatively simple takes.
Key words: four degrees of freedom; robot; transporting; Industrial robot
本设计中的四自由度棒料搬运机械手的有关技术参数见表1。
机械手类型 四自由度圆柱坐标型
抓取重量 2Kg
自由度 4个(2个回转2个移动)
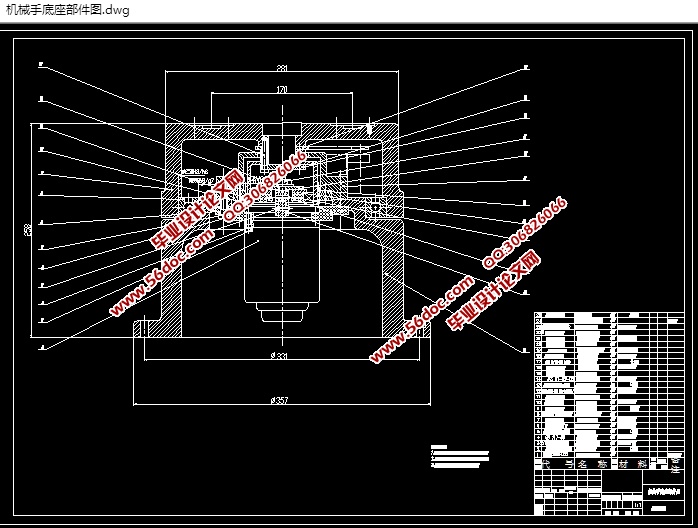
底座 长290mm,回转运动,回转角240°,步进电机驱动 PLC控制
手臂升降机构 长550mm,升降运动,升降范围400mm,步进电机驱动 PLC控制
手臂伸缩机构 长826mm,伸缩运动,伸缩范围270mm,气缸驱动 活塞位置控制
气爪旋转机构 旋转运动,旋转角180o,气缸驱动,行程开关控制


目 录
摘要……………………………………………………………………………………1
关键词…………………………………………………………………………………1
1前言……………………………………………………………………………………2
1.1工业机器人的概述与发展………………………………………………………2
1.2本设计中的四自由度棒料搬运机械手所实现的功……………………………3
1.3本设计中的四自由度棒料搬运机械手设计的意义……………………………3
2机械手的总体设计……………………………………………………………………4
2.1设计要求……………………………………………………………………………4
2.2机器手的组成………………………………………………………………………4
2.3总体方案拟定………………………………………………………………………4
2.4机器人的工作空间…………………………………………………………………5
2.5机械手驱动系统设计………………………………………………………………6
2.5.1机械手驱动器……………………………………………………………………6
2.5.2机械手传动机构…………………………………………………………………6
3机械手的传动设计……………………………………………………………………8
3.1滚珠丝杠的选择……………………………………………………………………8
3.2谐波齿轮减速器参数的确定………………………………………………………9
4机械手的各电动机的选择…………………………………………………………15
4.1机械手手臂升降步进电机的选择………………………………………………15
4.2机械手底座回转驱动电动机的选择……………………………………………16
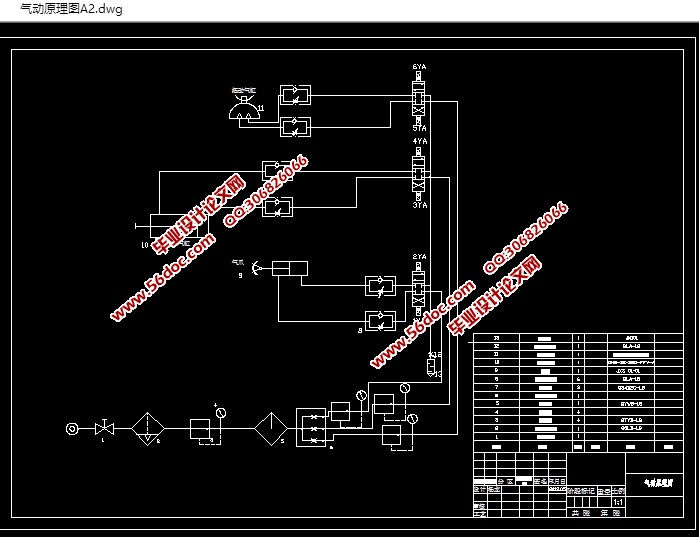
5机械手各气动件的设计计算………………………………………………………18
5.1气爪夹紧力的计算与气爪的选择………………………………………………18
5.1.1气爪夹紧力要求 ………………………………………………………………18
5.1.2缸径的确定……………………………………………………………………19
5.1.3行程的确定……………………………………………………………………20
5.1.4气缸的运动速度………………………………………………………………20
5.1.5摆动气缸的选择………………………………………………………………21
5.2手臂伸缩气缸的选择……………………………………………………………23
6机器人控制系统设计………………………………………………………………25
6.1机械手控制器的选择……………………………………………………………25
6.2机器手控制系统的特点及对控制功能的基本要求……………………………25
6.3控制系统的总体设计……………………………………………………………25
7手臂运算与机械手参数……………………………………………………………26
7.1手臂平衡的验算…………………………………………………………………26
7.2机械手参数………………………………………………………………………26
结束语………………………………………………………………………………26
参考文献………………………………………………………………………………27
致谢……………………………………………………………………………………27
|