ЛљгкarduinoЕФЗжМ№аЁГЕЩшМЦ(КЌSolidWorksШ§ЮЌЭМ,ГЬађ)(ТлЮФЫЕУїЪщ12600зж,ЭтЮФЗвы,SolidWorksШ§ЮЌЭМ,ЪгЦЕ,ГЬађ)
еЊ вЊ
БОТлЮФжївЊНщЩмЛљгкArduino ЦНЬЈЩшМЦЕФФмЙЛгУгкаЁаЭЮяСїЗжМ№дЫЪфЧвПЩвдКЭЪжЛњЩшБИНјааРЖбРЭЈбЖЕФаЁГЕЕФЩшМЦЙ§ГЬЁЃдкТлЮФжаЯШКѓВћЪіСЫИУЩшМЦЕФБГОАКЭдкЙњФкЭтЕФбаОПзДПіЃЌЭЈЙ§ЯЕЭГЫМТЗЩшЖЈЃЌОЗжЮіЕБЧАжїСїПижЦАхЕФгХШБЕуКѓОіЖЈЪЙгУArduino UNOПижЦАхЖдЯЕЭГНјааПижЦЃЌдЫгУSolidworksШэМўЭъГЩЗжМ№аЁГЕЕФШ§ЮЌНЈФЃМАИїСуМўЕФзАХфЙ§ГЬЁЃЮЊСЫЪЕЯжЗжМ№аЁГЕЕФдЄЦкЙІФмЃЌбЁдёГЌЩљВЈДЋИаЦїзїЮЊОрРыХаЖЯЕФдЊМўЃЌЭЈЙ§L298NЕчЛњЧ§ЖЏФЃПщПижЦаЁГЕЕФзЊЯђКЭзЊЫйЃЌвРОнЕчзшЕчЧХЕФЬиадЧвНсКЯHX711 A/DзЊЛЛаОЦЌЭъГЩЕчзгГгЕФЩшМЦЃЌЖдЗжМ№аЁГЕЩЯГадиЮяМўЕФаХЯЂЭЈЙ§LCD12864ЯдЪОЦСГЪЯжЁЃДЫЭтИљОнArduinoЦНЬЈКЭ AndroidЦНЬЈёюКЯадЧПЕФЬиадЃЌбЁгУРЖбРФЃПщЪЕЯжAndroidЪжЛњЩшБИКЭДюдиArduinoПижЦАхЕФЗжМ№аЁГЕжЎМфЕФЭЈаХЁЃЭъГЩЕчТЗСЌНгКѓГѕВНБраДГЬађСїГЬПђЭМКѓгУIDEЪЕЯжЖдЗжМ№аЁГЕЕФШэМўПижЦЃЌОЙ§ГЬађБрвыЁЂЩЯДЋЃЌРћгУIDEДЎПкМрЪгЦїЕФБуРћадКЭЗжМ№аЁГЕЕФЪЕЮяФЃаЭЭъГЩећЬхГЬађЕФЕїЪдКѓЃЌБОТлЮФЩшМЦЕФЗжМ№аЁГЕФмЙЛЪЕЯжздЖЏАсдЫЁЂГЦжиЁЂЯдЪОЁЂбАЙьМЃЕШдЄЦкЙІФмЁЃ
ЙиМќДЪЃКЗжМ№ЃЛArduinoЃЛРЖбРЭЈаХЃЛбМЃ
ABSTRACT
This dissertation mainly introduces the design process of a car designed based on the Arduino platform that can be used for small-scale logistics sorting and transportation and can communicate with mobile devices via Bluetooth. In the thesis, the background of the design and the research status at home and abroad were explained successively. After the analysis of the current advantages and disadvantages of the mainstream control, the design of the system was controlled using the Arduino UNO control board and the sorting was performed using Solidworks software. The three-dimensional modeling of the car and the assembly process of each part. In order to achieve the desired function of sorting trolleys, ultrasonic sensors are selected as distance-determining components. The L298N motor drive module is used to control the steering and rotation speed of the car, and the electronic scale is designed based on the characteristics of the resistance bridge and combined with the HX711 A/D conversion chip. The information on the carrying objects on the sorting cart is presented through the LCD12864 display. In addition, according to the strong coupling between the Arduino platform and the Android platform, the Bluetooth module is used to implement communication between the Android mobile device and the sorting cart equipped with the Arduino control panel. After the circuit connection is completed, the program flow diagram is preliminarily written to use the IDE to implement software control of the sorting cart. After the program is compiled and uploaded, the convenience of the IDE serial monitor and the physical model of the sorting cart are used to complete debugging of the entire program. The sorting cart designed by the dissertation can realize the expected functions such as automatic handling, weighing, display, and tracking.
Keywords: Sorting; Arduino; Bluetooth communication; tracking
ЯЕЭГЫМТЗЩшМЦ
БОЩшМЦЬтФПЮЊЛљгкArduinoЕФЗжМ№аЁГЕЩшМЦЃЌФПЕФдкгкЭЈЙ§РЖбРЭЈДЎПкЗНЪНСЌНгArduinoКЭAndroidСНЦНЬЈжЎМфЕФЭЈаХЁЃВйзїепжЛашНЋЪжЛњКЭаЁГЕЩЯЕФРЖбРНгЭЈЃЌМДПЩдкAndroidЪжЛњЩЯВйПиаЁГЕЁЃУПвЛИіЮяСїМЏЩЂЕиЖМЖдгІзХвЛИіЪ§зжЃЌР§ШчаЁаЭЮяМўЕФФПЕФЕиЮЊББОЉЃЌЖјдкЯЕЭГГЬађжаББОЉЖдгІЕФДЎПкЪ§зжЮЊ2ЃЌВйзїепНЋЮяМўЗХжСаЁГЕЩЯВЂдкЪжЛњЩЯАДЯТ“2”КѓЃЌаЁГЕЛсздЖЏГЦжиЃЌдкLCDЦСФЛЩЯЯдЪОГіЮяМўЕФжиСПКЭдЫЪфЕФЗбгУМАЫљвЊЕНДяЕФМЏЩЂЕиЁЃГЦжиНсЪјКѓаЁГЕЛсздЖЏАДеедЫЪфТЗОЖНЋЮяМўЫЭжСЖдгІЛѕЯфжаЃЌдйдТЗЗЕЛиЁЃдкдЫЪфЙ§ГЬжаПЩФмЛсгіЩЯЦфЫћаЁГЕЛђзХеЯАЮяГіЯждкЧАЗНЃЌетЪБаЁГЕашЭЃжЙдЫЪфжБжСЧАЗНМьВтВЛЕНеЯАЮяЃЌетОЭЪЧЯЕЭГЩшМЦжавЛЬзЭъећЕФдЫЪфЙ§ГЬКЭаЁГЕдЫаазДЬЌ


ФП ТМ
еЊ вЊ I
ABSTRACT II
1 аїТл 1
1.1ЩшМЦбаОПЕФБГОАМАвтвх 1
1.2ЙњФкЭтЗЂеЙзДПі 1
2 ЯЕЭГећЬхЩшМЦ 4
2.1ЯЕЭГЫМТЗЩшМЦ 4
2.2ПижЦаОЦЌЕФбЁдё 4
2.3 ArduinoЯрЙиНщЩмМАаЭКХбЁдё 5
2.4ЗжМ№аЁГЕЕФШ§ЮЌНЈФЃ 6
3 аЁГЕгВМўНщЩм 10
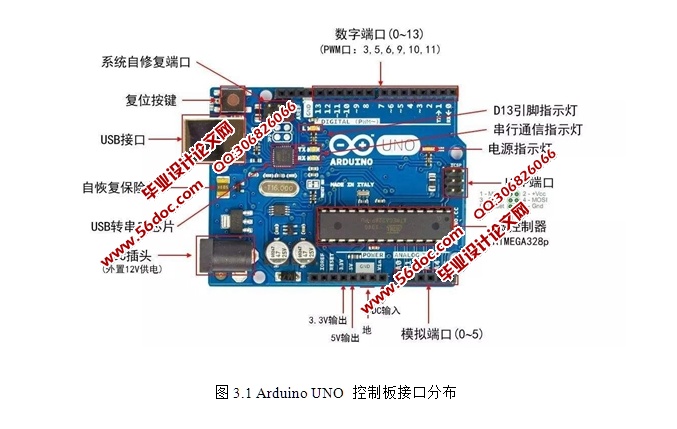
3.1 Arduino UNO 10
3.2ГЌЩљВЈФЃПщ 11
3.3ЕчЛњЧ§ЖЏФЃПщЃЈL293NЃЉ 12
3.4 5KGбЙСІДЋИаЦїКЭHX711ФЃПщ 13
3.5 LCD 12864ЯдЪОЦС 17
3.6 РЖбРФЃПщ 19
3.7АкБлЖцЛњ 20
4 ЗжМ№аЁГЕГЬађБраД 21
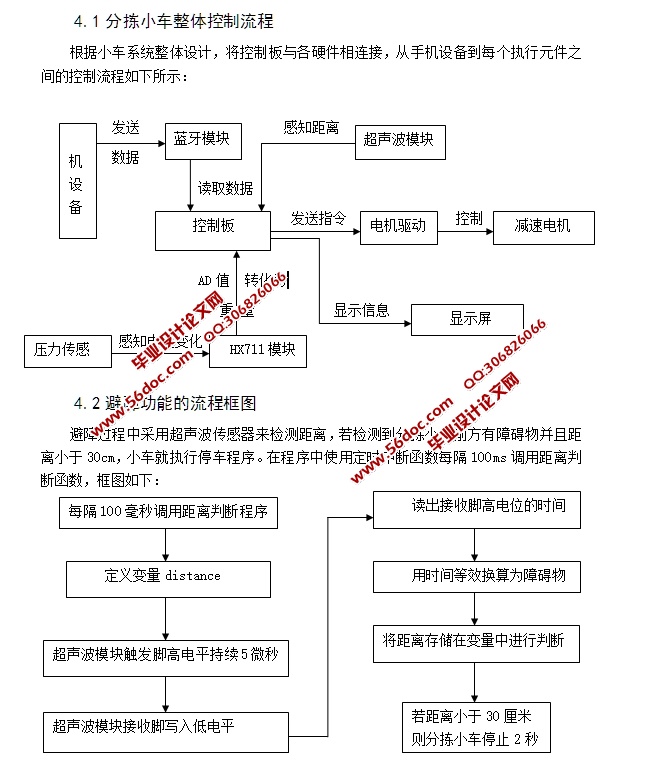
4.1ЗжМ№аЁГЕећЬхПижЦСїГЬ 21
4.2БмеЯЙІФмЕФСїГЬПђЭМ 21
4.3бМЃЙІФмЕФСїГЬПђЭМ 22
4.4ГЦжиЙІФмЕФСїГЬПђЭМ 23
4.5 LCDЦСЯдЪОЙІФмЕФСїГЬПђЭМ 24
4.6РЖбРЭЈаХЙІФмЕФСїГЬПђЭМ 25
4.7ЖцЛњАкБлЙІФмЕФСїГЬПђЭМ 25
5 ЯЕЭГЕїЪд 26
5.1ДЎПкМрЪгЦїЪЙгУ 26
5.2 РЖбРФЃПщATЩшжУ 26
5.3ЕїЪджагіЕНЕФЮЪЬт 27
6 змНс 28
ВЮПМЮФЯз 29
жТ аЛ 30
ИНТМ1ЃКЭтЮФвыЮФ 31
ИНТМ2ЃКЭтЮФдЮФ 36
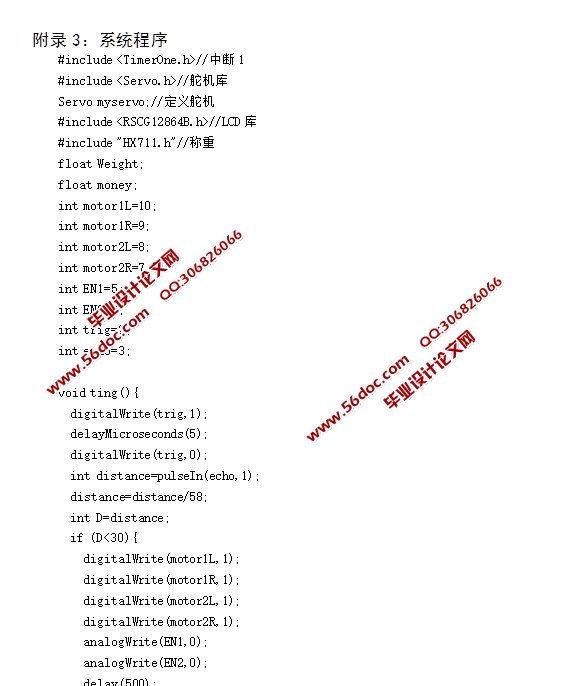
ИНТМ3ЃКЯЕЭГГЬађ 41
|