爬楼梯机器人小车设计(含CAD零件图装配图,SolidWorks三维图)(开题报告,中期检查,论文说明书8000字,CAD图纸6张,SolidWorks三维图)
本项目打算开发一个采用三角形轮系爬楼梯小型小车驾驶系统。在驾驶车辆过程中,以满足步骤和斜坡等特殊路面,可以实现通过三角轮系翻转屏障功能。包括:车辆传动系统、驱动系统和转向系统三大系统。
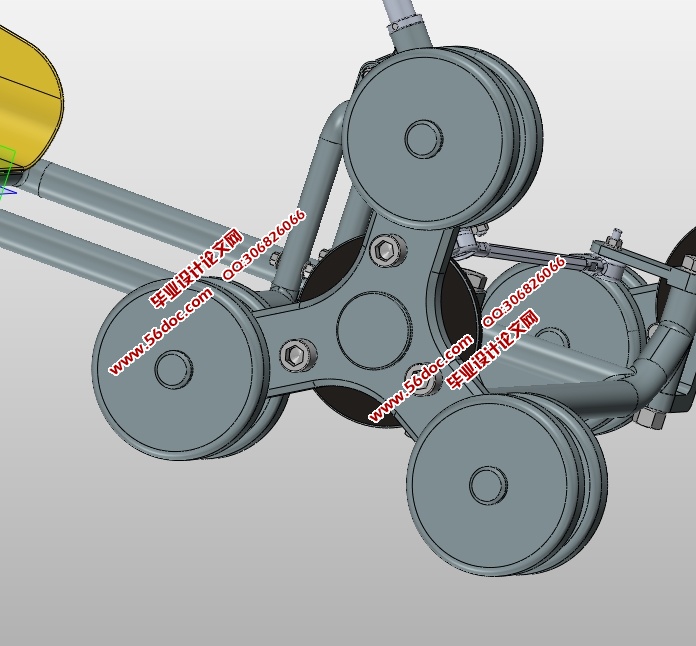
楼梯小型车辆实现自动障碍和楼梯的功能,15公里/小时,最大速度平滑路面可以爬楼梯高度为100 ~ 100毫米,楼梯宽度是200 ~ 300毫米,最大爬斜坡40°。传动系统由电动机驱动,可以双向,手动控制和自动控制,系统稳定运行的要求,噪音低,安全可靠。驱动系统采用三角形轮系,平面道路,每组有两个轮起落架小车,爬上楼梯,通过三角轮系暴跌实现功能。转向系统由电机驱动转向半径尽可能小。
2.1 爬楼梯小车的工作原理与特点
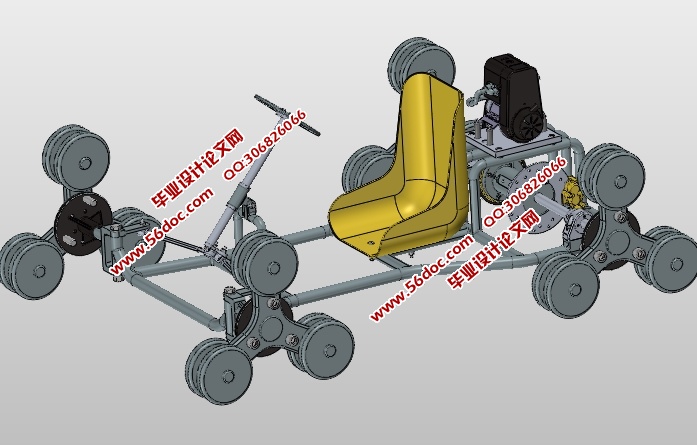
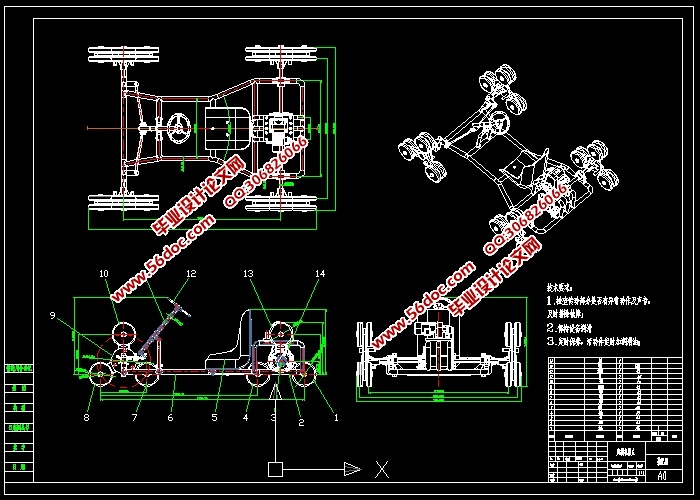
楼梯小型车辆包括:传动系统、驱动系统和转向系统三大系统。三个系统构成楼梯机械部分的小车,每个系统的相应的电动机驱动。
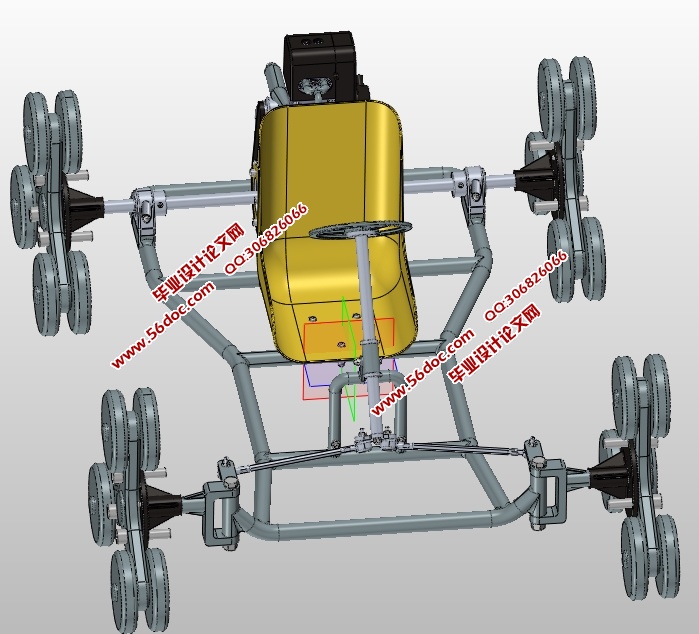
传动系统由电动机驱动的一个一流的锥形齿轮传动和两个圆柱齿轮传动实现速度和增加转矩,驱动主轴旋转,实现三角轮系,三角形轮系翻转是实现楼梯的功能。混凝土是三角形的三个齿轮小车车轮一起通过支架,轴旋转,爬楼梯小车取决于三个三角形的齿轮小车轮子与步骤,从而达到上下楼梯的功能。
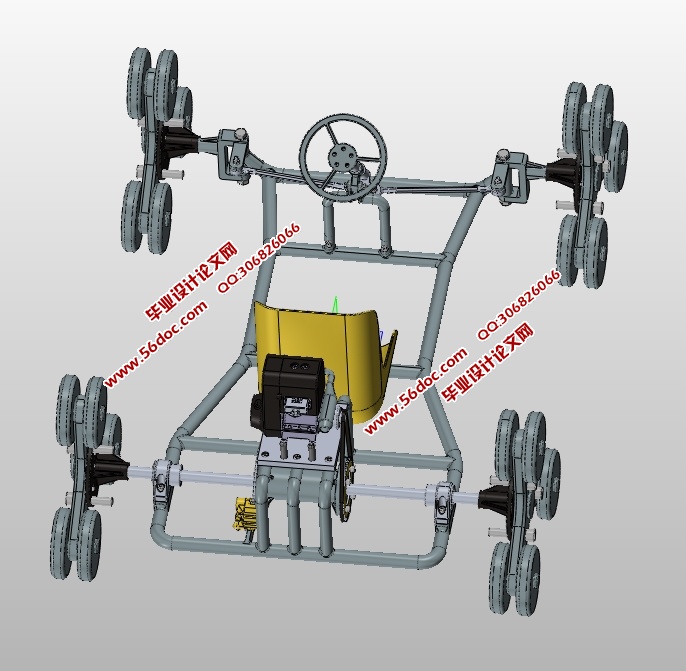
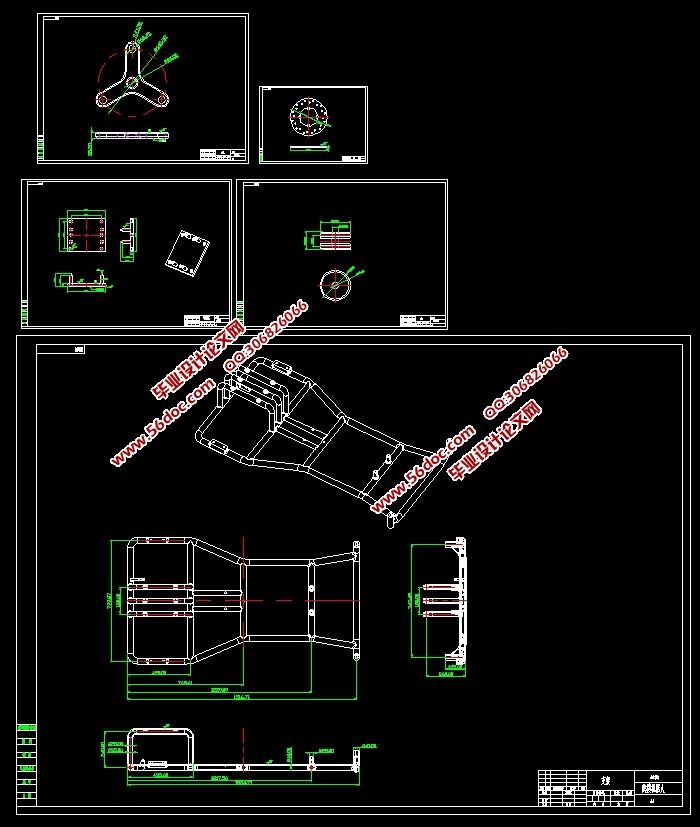
转向系统,以达到实现小空间的最小转弯半径,本设计采用独立转向方式,即通过添加辅助架、电机驱动整个传输系统和驱动系统和变位齿轮小车,为了达到转向的目的。具体方案是通过轴有足够的强度,较低的轴连接到小车前轴的爬楼梯装置外壳,顶部和操舵板通过轴承连接,中间的轴安装了一个大的锥形齿轮,选择合适的电机固定板上,通过耦合齿轮连接到电机轴、齿轮轴、大伞齿轮旋转在一定比例的啮合传动,当需要把感应系统和控制装置根据实际需要控制转动角度。
爬楼梯小车有五个特点:1)结构简单,整体尺寸和重量小;2)对于每一个系统由一个单独的电机,控制灵活性;3)可以安装或加载实验装置在一定重量的仪器或危险的地方或人体的地方作业或抽样;4)使用三角形齿轮小车系统,爬楼梯运动车可以在各种各样的环境中,很容易在地面上,运动表面的斜率和步骤;5)爬楼梯小车采用独立转向系统,不仅简化了转向系统,和转弯半径减小,有利于在狭窄的空间

目录
一 前 言 2
1.1 爬楼梯小车发展概况 3
1.2 爬楼梯小车的发展背景及设计意义 3
二 爬楼梯小车的设计方案说明 4
2.1 爬楼梯小车的工作原理与特点 4
2.2 设计方案分析 5
三 爬楼梯小车主要部件设计 7
3.1传动系统结构设计及计算 7
3.1.1传动轴的设计 7
3.2轴承的计算及选型 9
3.3 选择电动机 13
3.4选择联轴器 14
3.5关于减速装置(圆锥—圆柱齿轮减速) 14
四 .齿轮的选择与计算 15
4.1.高速级参数计算 15
4.2受力分析与静强度校核 20
4.2.1受力分析 20
4.2.2 低速级外啮合齿面静强度计算 21
4.3齿轮传动强度的校核计算: 22
4.3.1齿面接触强度的校核计算 22
4.3.2 轴的设计计算 23
4.3.3键联接的校核强度 24
4.3.4销联接的强度校核 25
五 爬楼梯小车的总体设计 26
设计总结 28
致 谢 29
参考资料 30
|