ЫЭСЯЛњаЕЪжЕФЩшМЦ(КЌCADСуМўзАХфЭМ,IGS,SolidWorksШ§ЮЌЭМ)
РДдДЃК56doc.com зЪСЯБрКХЃК5D17617 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D17617
зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
ЫЭСЯЛњаЕЪжЕФЩшМЦ(КЌCADСуМўзАХфЭМ,IGS,SolidWorksШ§ЮЌЭМ)(ТлЮФЫЕУїЪщ8600зж,CADЭМжН9еХ,IGSШ§ЮЌЭМ,SolidWorksШ§ЮЌЭМ)
еЊвЊ
БОДЮБЯвЕЩшМЦЕФЬтФПЪЧЫЭСЯЛњаЕЪжЕФЩшМЦЃЌЪзЯШЖдЫЭСЯЛњаЕЪжЕФЙЄПіНјааЗжЮіЃЌДЫЖрЙЄЮЛзЈгУЛњаЕЪжЭъГЩаЁБлЩЯЯТИЉбіЁЂДѓБле§ЗДЯђЛизЊЁЂаазпзАжУНјЭЫШ§ИіздгЩЖШЃЌвдМАЪжзІЕФПЊЦєКЭБеКЯЕШЖЏзїЃЌШЛКѓИјГіИУЫЭСЯЛњаЕЪжЕФвКбЙЯЕЭГЕФЕчДХдЊМўЖЏзїбађБэКЭвКбЙЯЕЭГдРэЭМЁЃ
БОаЕЪжгЩДѓБлНсЙЙЃЌаЁБлЁЂа§зЊНсЙЙКЭЧ§ЖЏЛњЙЙзщГЩЃЌИУЩшМЦФмЪЕЯжШ§ИіздгЩЖШЃЌЗжБ№ЮЊЪжзІЕФПЊКЯЃЌа§зЊЃЌаЁБлЕФЩЯЯТАкЖЏвдМАДѓБлЕФа§зЊЕШЕШЙІФмЁЃ
ЙиМќДЪЃКЫЭСЯЛњаЕЪжЃЛвКбЙЯЕЭГЃЛздгЩЖШЃЛЙІФм
Abstract
This graduation project mainly had the CA18 control engine bed and the programming introduction, the ear components tech nological analysis craft parameter choice cutting tool choice, the components procedure manual establishment, the procedure simulation, the modelling and the entity simulation processing finally has made the design summary,the acknowledgment language, the reference tabulation and the appendix.Article primary coverage for components craft analysis.
This components manual programming, but also has to make engineer's modelling and the entity simulation processing.Used the circular arc interpolation instruction in the components manual programming; drill hole; M98 transfer subroutine instruction.
Key words: auto-focus;Industrial robot ;degrees of freedom ;fucation
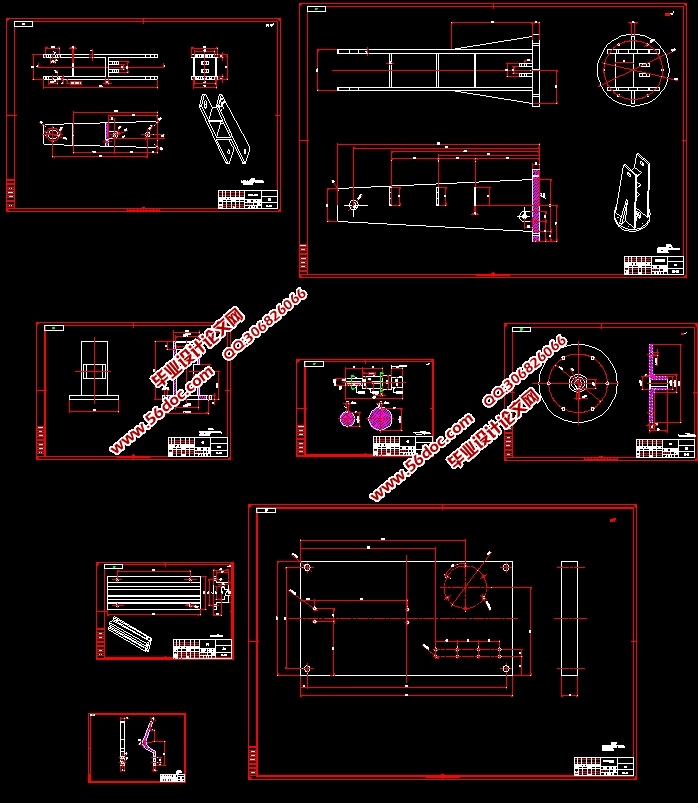
ЫЭСЯЛњаЕЪжЕФзмЬхЗНАИЭМ
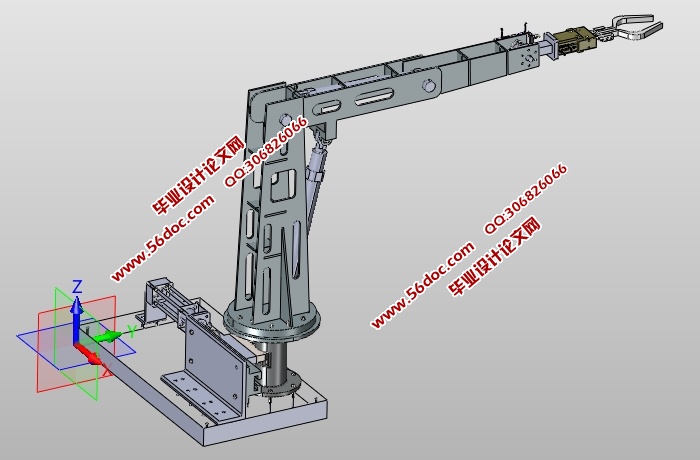
БОаЕЪжЕФНсЙЙжївЊгЩДѓБлЃЌаЁБлЁЂа§зЊНсЙЙКЭЧ§ЖЏЛњЙЙзщГЩЁЃЕчЖЏЛњЭЈЙ§Ч§ЖЏЕзВПЕФГнТжГнЬѕЛњЙЙЧ§ЖЏећИіЛњаЕЪжа§зЊЃЌШЛКѓаЁБлЕФАкЖЏЪЧППЕзВПЕФвКбЙИзЧ§ЖЏЕФЃЌЭЌРэЃЌаЁБлЕФАкЖЏвВЪЧППАВзАдкДѓБлЩЯУцЕФвКбЙИзЧ§ЖЏАкЖЏЕФЁЃМазІЕФзЅШЁЮяЬхКЭЫЩПЊЮяЬхЪЧППАВзАдкЛњаЕЪжжДааЖЫВПЕФЦјЖЏЪжжИПижЦЕФЁЃИУЩшМЦФмЪЕЯжШ§ИіздгЩЖШЃЌЗжБ№ЮЊЪжзІЕФПЊКЯЃЌа§зЊЃЌаЁБлЕФЩЯЯТАкЖЏвдМАДѓБлЕФа§зЊЕШЕШЙІФмЁЃЕБашвЊМаГжЕФЙЄМўЪЧЙЬЬЌЮяЬхЕФЪБКђЃЌЪжВПгІИУЩшМЦГЩПЊКЯаЭЕФЃЌетбљОЭПЩвджБНгЭЈЙ§ЦћИзЪЕЯжЙЄМўЕФМаНєгыЫЩПЊСЫЁЃБОДЮЩшМЦЕФЫЭСЯЛњаЕЪжЕФзмЬхЗНАИЭМШчЯТЭМ2ЫљЪОЃК
ЫЭСЯЛњаЕЪжЕФЙЄзїдРэ
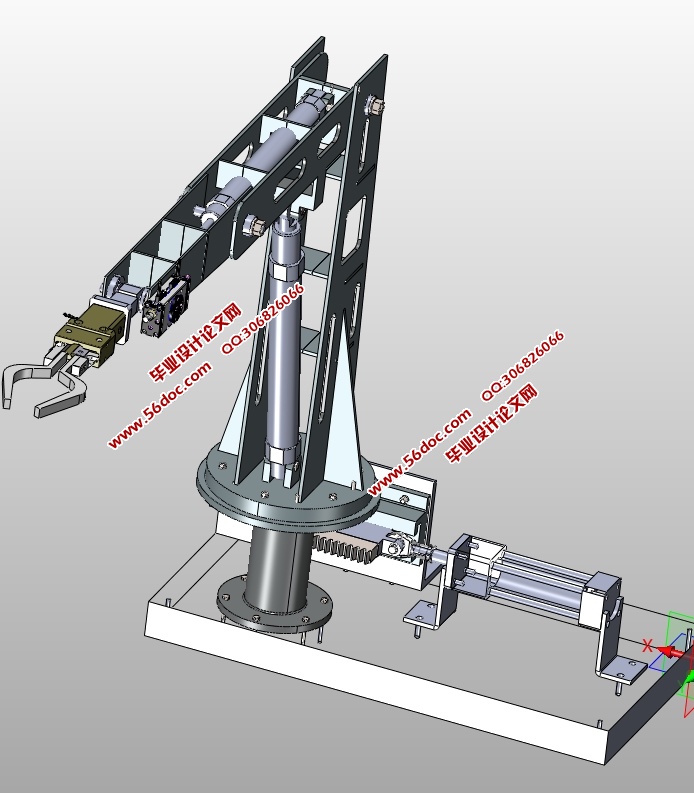
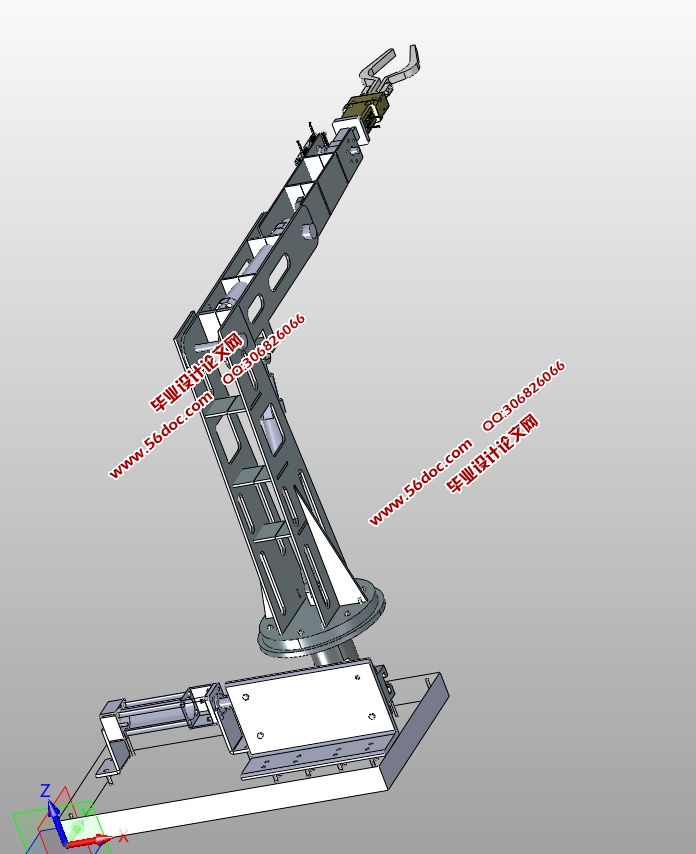
БОДЮЩшМЦЕФЫЭСЯЛњаЕЪжжївЊгЩДѓБлНсЙЙЃЌаЁБлЁЂа§зЊНсЙЙКЭЧ§ЖЏЛњЙЙвдМАжБЯпЕМИЫЕШЕШзщГЩЁЃИУЩшМЦФмЪЕЯжШ§ИіздгЩЖШЃЌЗжБ№ЮЊЪжзІЕФПЊКЯЃЌа§зЊЃЌаЁБлЕФЩЯЯТАкЖЏвдМАДѓБлЕФа§зЊЕШЕШЙІФмЁЃЕБашвЊМгГжСЯЕНЛњДВРяУцЕФЪБКђЃЌЫХЗўЕчЛњЧ§ЖЏЙіжщЫПИЫТнФИИБЖЏзїЃЌДгЖјЪЕЯжЕззљЕФвЦЖЏЃЌШЛКѓгЩвКбЙИзЧ§ЖЏЛњаЕЪжЕФДѓБлЁЂаЁБлЖЏзїЃЌЪжВПЕФМазІМазЁЙЄМўЗХЕНжИЖЈЕФЮЛжУЃЌШЛКѓЖрЙЄЮЛзЈгУЭъГЩКѓЃЌЫХЗўЕчЛњЗДзЊЃЌДјЖЏећИіЛњаЕЪжКѓЭЫЃЌвКбЙИзЧ§ЖЏЛњаЕЪжЕФДѓБлЁЂаЁБлЖЏзїЃЌШчДЫбЛЗЁЃ

ФП ТМ
ЕквЛеТ аї Тл 1
1.1БОПЮЬтбаОПЕФФкШн 1
1.2ЙњФкЭтЗЂеЙзДПі 2
1.3ЛњаЕЪжЕФзщГЩКЭЗжРр 4
1.4вКбЙДЋЖЏЕФЛљДЁжЊЪЖ 6
ЕкЖўеТ ЫЭСЯЛњаЕЪжЕФЩшМЦЗНАИ 8
2.1 ЫЭСЯЛњаЕЪжЕФзмЬхЗНАИЭМ 9
2.2 ЫЭСЯЛњаЕЪжЕФЙЄзїдРэ 10
ЕкШ§еТ ЫЭСЯЛњаЕЪжНсЙЙЕФЩшМЦ 11
3.1МаГжЪНЪжВПНсЙЙ 12
3.1.1ЪжжИЕФаЮзДКЭЗжРр 13
3.1.2ЩшМЦЪБПМТЧЕФМИИіЮЪЬт 14
3.1.3ЪжВПМаНєвКбЙИзЕФЩшМЦ 14
3.2вКбЙИзЧ§ЖЏСІОиЕФМЦЫу 16
3.3вКбЙИзЧ§ЖЏСІОиЕФМЦЫуаЃКЫ 17
3.4 ЕчЛњЕФбЁаЭМЦЫу 18
ЕкЫФеТ ЫЭСЯЛњаЕЪжжаЙиМќСуВПМўЕФЧПЖШМЦЫугыаЃКЫ 23
4.1ГнТжЕФЧПЖШМЦЫугыаЃКЫ 24
4.2жсЕФЧПЖШМЦЫугыаЃКЫ 25
ЕкЮхеТ ЫЭСЯЛњаЕЪжвКбЙЯЕЭГЕФЩшМЦ 26
5.1вКбЙЯЕЭГдРэЭМЕФШЗЖЈ 27
5.2ЕчДХдЊМўЖЏзїбађБэЕФШЗЖЈ 28
зм Нс 29
жТ аЛ 30
ВЮПМЮФЯз 31
|