МєВцЪНЩ§НЕЛњЕФЩшМЦ(КЌCADСуМўзАХфЭМ,IGS,SolidWorksШ§ЮЌЭМ)(ТлЮФЫЕУїЪщ9800зж,CADЭМжН7еХ,IGSШ§ЮЌЭМ,SolidWorksШ§ЮЌЭМ)
The Design of shear fork lift
еЊвЊ
ЫцзХПЦММКЭЩчЛсЕФЗЂеЙКЭНјВНЃЌИїжжИїбљЕФМєВцЪНЩ§НЕЛњНЋЛсТНајГіЯждкНЈжўЙЄЕиЕФЪЉЙЄгІгУжаЃЌгыДЫЭЌЪБЃЌЫцзХЪБМфЕФЭЦвЦЃЌЫцзХМєВцЪНЩ§НЕЛњЕФдНРДдНЦеМАЃЌгЩгкНсЙЙЛђепВФСЯЕФдвђБЉТЖГіРДЕФЮЪЬтдНРДдНЦЕЗБЃЌШчЙћВЛЖдМєВцЪНЩ§НЕЛњНјааНсЙЙДДаТКЭИФНјЃЌзюЛљБОЕФОЭЪЧбЯжигАЯьСЫНЈжўЪЉЙЄЕФаЇТЪЃЌбЯжиЕФЕМжТМєВцЪНЩ§НЕЛњВЛФме§ГЃЪЙгУЃЌгАЯьЪЉЙЄЕФНјЖШКЭжЪСПЃЌдквдЧАЃЌЮвЙњЖдетжжЯжзДЕФжиЪгГЬЖШЛЙЪЧВЛЙЛЃЌМДдкМєВцЪНЩ§НЕЛњЩЯгаздДјЕФЮЌаоЙЄОпЃЌЕЋетЖдгкФбЖШДѓЕуЕФЮЌаоЙЄзїОЭДјРДРЇФбЃЌШчЙћЗЂЩњЙЪеЯЃЌИљБООЭВЛФмЙЛЮЌаоЃЌЖјЧветжжЯжзДДцдкзХаэЖрВЛКЭаГвђЫиЃЌИќЪЙШКЬхЗжЛЏМгОчЃЌЩчЛсШЫЮФЙиЛГГЬЖШЕФЯТНЕЁЃЖјШчЙћФмЙЛЭЈЙ§КЯРэЙцЛЎЩшМЦГіМєВцЪНЩ§НЕЛњЃЌетбљВЛНіФмЙЛЬсИпЪЉЙЄжЪСПЖјЧввВФмЙЛБЃеЯШЫЩэАВШЋЃЌНкдММєВцЪНЩ§НЕЛњЕФГЩБОЁЃ
БОДЮЩшМЦЪЧЙигкМєВцЪНЩ§НЕЛњЕФЩшМЦЃЌЭЈЙ§ЖдДЋЭГЕФМєВцЪНЩ§НЕЛњЕФНсЙЙНјааСЫИФНјКЭгХЛЏЃЌЖдЫќЕФЛњаЕНсЙЙКЭвКбЙЯЕЭГНјааЩшМЦЃЌЪЙЕУДЫжжРраЭЕФМєВцЪНЩ§НЕЛњЕФЪЙгУЗЖЮЇИќЙуЗКЃЌИќМгСщЛюЃЌВЂЧвЖдНёКѓЕФбЁаЭЩшМЦЙЄзїгавЛЖЈЕФВЮПММлжЕЁЃ
ЙиМќДЪЃКЛњаЕЃЛвКбЙЃЛМєВцЪНЩ§НЕЛњЃЛВЮПМ
Abstract
For a lot of special places, like the risk is very big, or we are difficult to reach, such as disarm bombs, unknown corresponding domains such as detection, probing deep of more dangerous situation usually need to implement the robot.It’s a main part of robot for micro pedipulator, walking robots and more than six feet, compared to the Eight Legged Robot, because of strong bearing capacity, good stability, which the meritss is simple construction, So, a large number of researchers around the world, start .This paper mainly to the four bar mechanism as the main execution elements to design of micro walking the whole scheme of the four bar mechanism.
Its principle is diagonal synchronization, leg activity by the structure of the crank rocker, front leg movements around the same, it detailed performance curve characteristics of the connecting rod,when the curve trajectory diagonal straight line segment, the robot is stationary, the motion trajectory when the diagonal curve is slanting line do the walking.
KeywordsЃКManufacturing ,Location, Clamping, Process
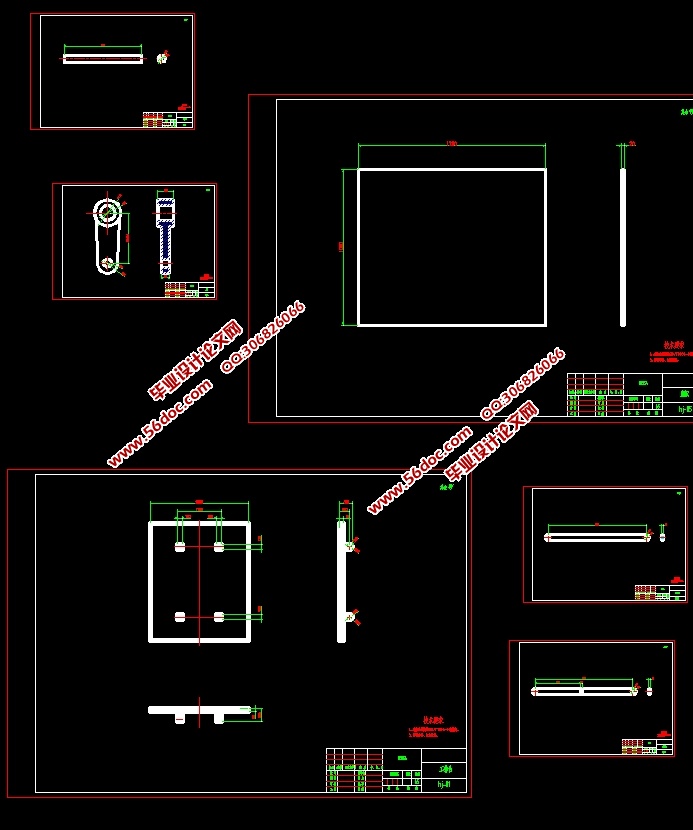
2.1 МєВцЪНЩ§НЕЛњЕФзмЬхЗНАИЭМ
МєВцЪНЩ§НЕЛњвЛАугУгкНЈжўЮяВуИпМфдЫЫЭЛѕЮяЃЌВњЦЗжївЊгУИїжжЙЄзїВуМфЛѕЮяЩЯЯТдЫЫЭЃЛСЂЬхГЕПтКЭЕиЯТГЕПтВуИпМфЦћГЕОйЩ§ЕШЁЃВњЦЗвКбЙЯЕЭГЩшжУЗРзЙЁЂГЌдиАВШЋБЃЛЄзАжУЃЌИїТЅВуКЭЩ§НЕЛњЙЄзїЬЈУцОљПЩЩшжУВйзїАДХЅЃЌЪЕЯжЖрЕуПижЦЁЃВњЦЗНсЙЙМсЙЬЃЌГадиСПДѓЃЌЩ§НЕЦНЮШЃЌАВзАЮЌЛЄМђЕЅЗНБуЃЌЪЧОМУЪЕгУЕФЕЭТЅВуМфЬцДњЕчЬнЕФРэЯыЛѕЮяЪфЫЭЩшБИЁЃИљОнЩ§НЕЬЈЕФАВзАЛЗОГКЭЪЙгУвЊЧѓЃЌбЁдёВЛЭЌЕФПЩбЁХфжУЃЌПЩШЁЕУИќКУЕФЪЙгУаЇЙћЁЃЦфзмЬхЗНАИЭМШчЯТЭМ2-1ЫљЪОЃК
2-1 МєВцЪНЩ§НЕЛњзмЬхЗНАИЭМ
2.2.МєВцЪНЩ§НЕЛњЕФзмЬхЩшМЦ
2.2.1 ШЗЖЈМєВцЪНЩ§НЕЛњВЮЪ§ЕФддђ
1ЁЂвЊТњзуХфЬзЩшБИЕФЯрЙивЊЧѓЃЛ
2ЁЂгыМєВцЪНЩ§НЕЛњЕФЙЄзїЗНЪН(МДЪБжЇЛЄЛђжЭКѓжЇЛЄ)ЯрЪЪгІЃЛ
3ЁЂНсЙЙНєДеЃЌШЫВйзїЗНБуЃЛ
4ЁЂМєВцЪНЩ§НЕЛњЕФЙЄзїЮШЖЈадКУЁЃ
2.2.2 ШЗЖЈМєВцЪНЩ§НЕЛњНсЙЙВЮЪ§ЕФФкШн
1ЁЂШЗЖЈе§ГЃЙЄзїЬѕМўЯТЃЌМєВцЪНЩ§НЕЛњгыЯргІЩшБИЕФЮЛжУЙиЯЕЃЛ
2ЁЂШЗЖЈМєВцЪНЩ§НЕЛњзмЬхгыжївЊВПМўЕФВМжУгыГпЁЃ
2.2.3 МєВцЪНЩ§НЕЛњжївЊГпДчЕФШЗЖЈ
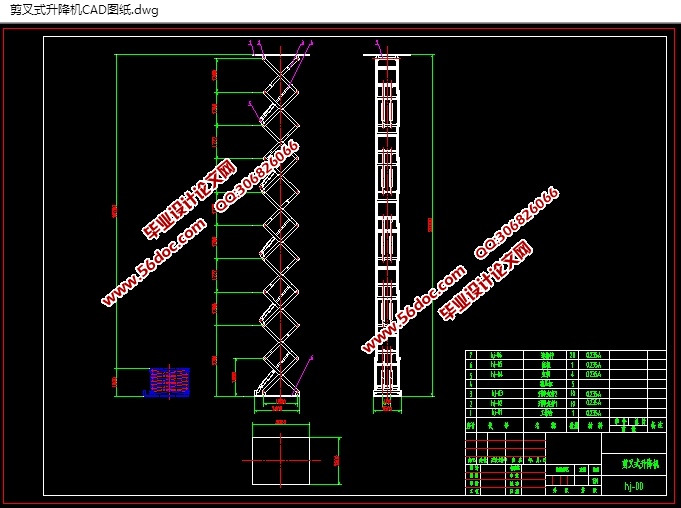
1ЁЂМєВцЪНЩ§НЕЛњИпЖШ
МєВцЪНЩ§НЕЛњзюаЁИпЖШЮЊЃКHm=1.8m
МєВцЪНЩ§НЕЛњзюДѓИпЖШЮЊЃКHn=20m
2ЁЂМєВцЪНЩ§НЕЛњЩьЫѕБШ
МєВцЪНЩ§НЕЛњЕФЩьЫѕБШжИзюДѓгызюаЁМєВцЪНЩ§НЕЛњИпЖШжЎБШжЕЮЊЃК ДњШыЪ§ОнЕУm=2ЁЃ
2.2.4 МєВцЪНЩ§НЕЛњМфОр
ЫљЮНМєВцЪНЩ§НЕЛњМфОрЃЌОЭЪЧЯрСкСНМєВцЪНЩ§НЕЛњжааФЯпМфЕФОрРыЁЃАДЯТЪНМЦЫуЃКbc=Bm+n∙C3ЃЛ
ФП ТМ
еЊвЊ I
Abstract II
1в§бд 1
1.1ПЮЬтЕФРДдДгыбаОПЕФФПЕФКЭвтвх 1
1.2БОПЮЬтбаОПЕФФкШн 3
1.3МєВцЪНЩ§НЕЛњЕФЗЂеЙЯжзД 5
2МєВцЪНЩ§НЕЛњзмЬхНсЙЙЕФЩшМЦ 7
2.1МєВцЪНЩ§НЕЛњЕФзмЬхЗНАИЭМ 9
2.2МєВцЪНЩ§НЕЛњЕФзмЬхЩшМЦ 11
2.2.1ШЗЖЈМєВцЪНЩ§НЕЛњВЮЪ§ЕФддђ 12
2.2.2ШЗЖЈМєВцЪНЩ§НЕЛњНсЙЙВЮЪ§ЕФФкШн 14
2.2.3МєВцЪНЩ§НЕЛњжївЊВЮЪ§ЕФШЗЖЈ 15
2.2.4МєВцЪНЩ§НЕЛњМфОр 16
2.3 ОйЩ§ЛњЕФСІбЇЗжЮігыМЦЫу 17
2.3.1 ОйЩ§ЛњзюЕЭзДЬЌЪБЃЌИїБлЪмСІЧщПі 17
2.3.2 ОйЩ§ЛњОйЩ§ЕНзюИпЮЛжУЪБЃЌИїБлЪмСІЧщПі 18
2.3.3 МєЕЖЪНОйЩ§ЛњЙЙжївЊЪмСІИЫМўЧПЖШаЃКЫМЦЫу 18
2.3.4 СЌНгТнЫЈЕФаЃКЫ 19
2.4вКбЙИзЕФбЁаЭМЦЫу 20
2.4.1ИзЬхБкКёЕФМЦЫу 21
2.4.2ИзЕзКёЖШЕФМЦЫу 22
2.4.3ИзЭВЗЂЩњЭъШЋЫмадБфаЮЕФбЙСІМЦЫу3.2.4ИзЭВОЖЯђБфаЮМЦЫу 23
2.4.4ЛюШћИЫЧПЖШЕФМЦЫу 23
2.4.5ЙмТЗЕФЩшМЦ 24
3ИКдиЭМКЭЫйЖШЭМ 25
4ИїжївЊСуВПМўЧПЖШЕФаЃКЫ 26
4.1ЙЄзїЬЈЕФЧПЖШаЃКЫ 27
5МєВцЪНЩ§НЕЛњЕФПижЦдРэ 28
НсТл 29
жТаЛ 30
ВЮПМЮФЯз 31
|