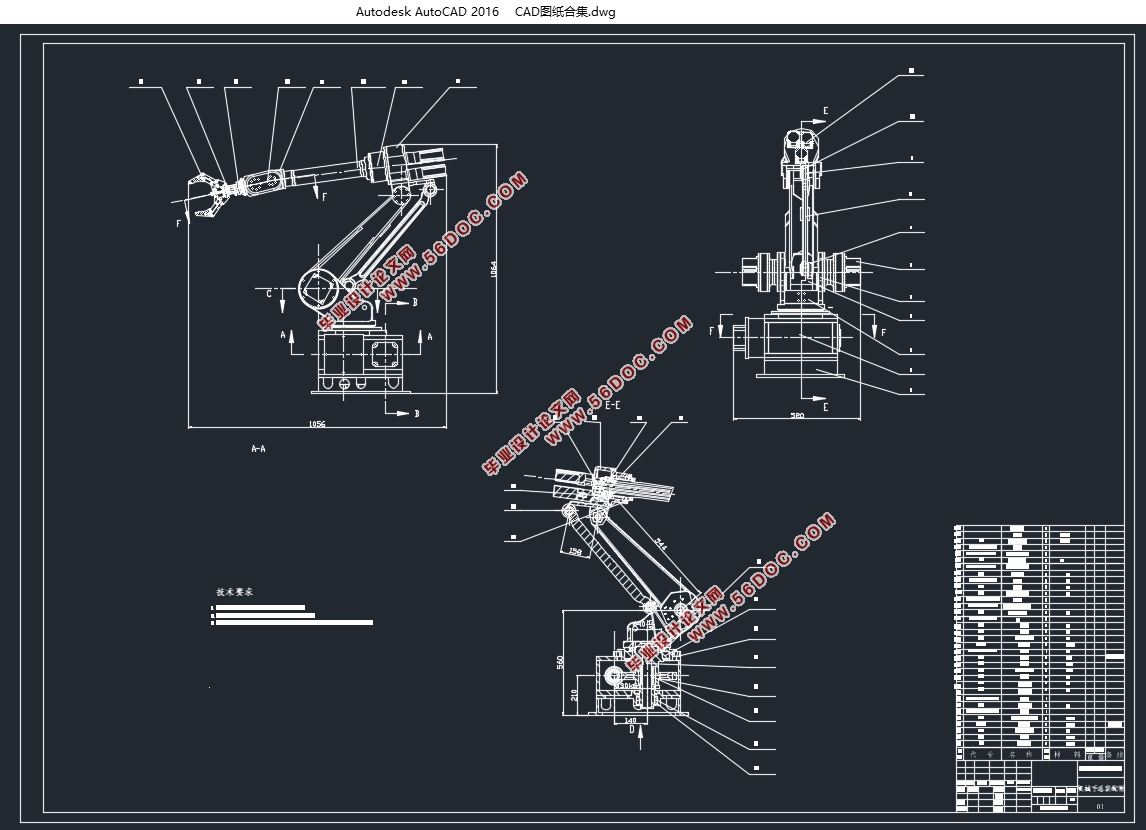
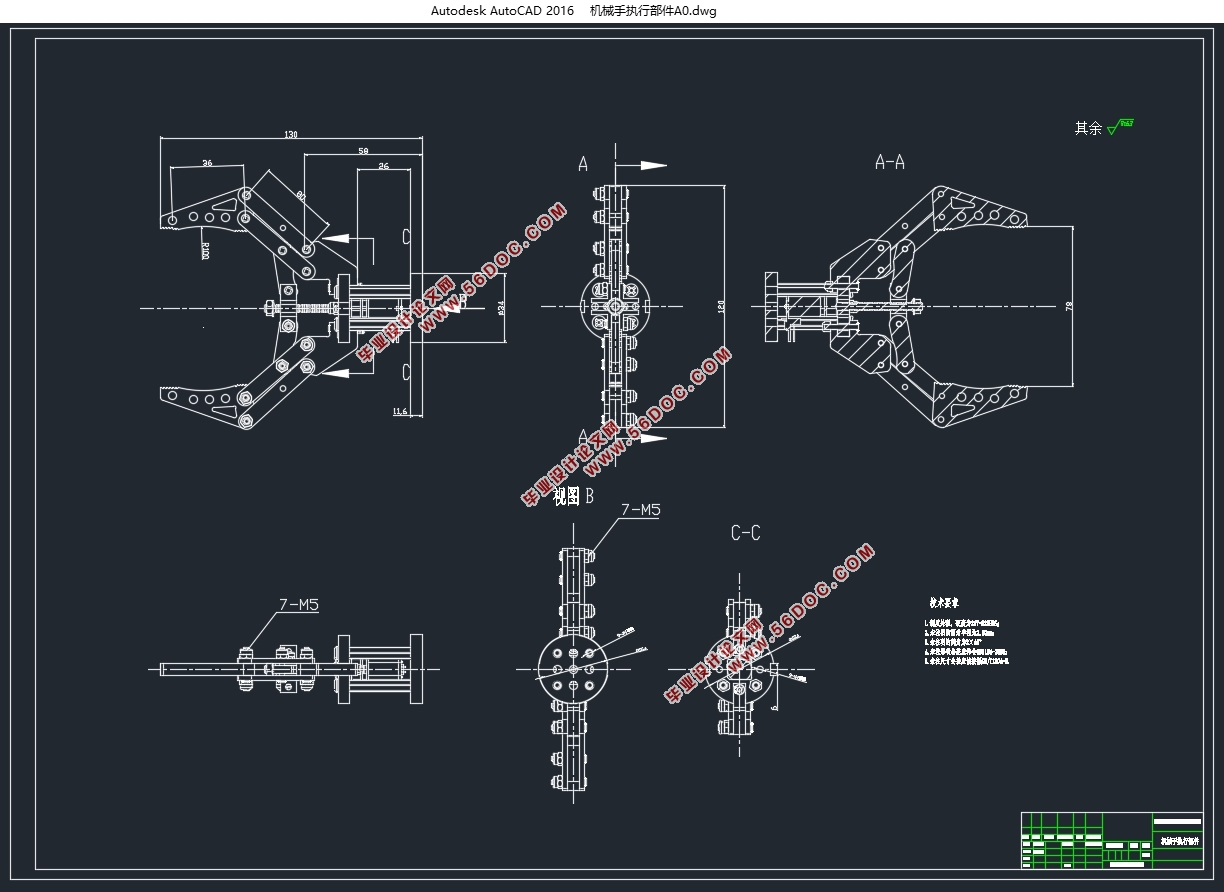
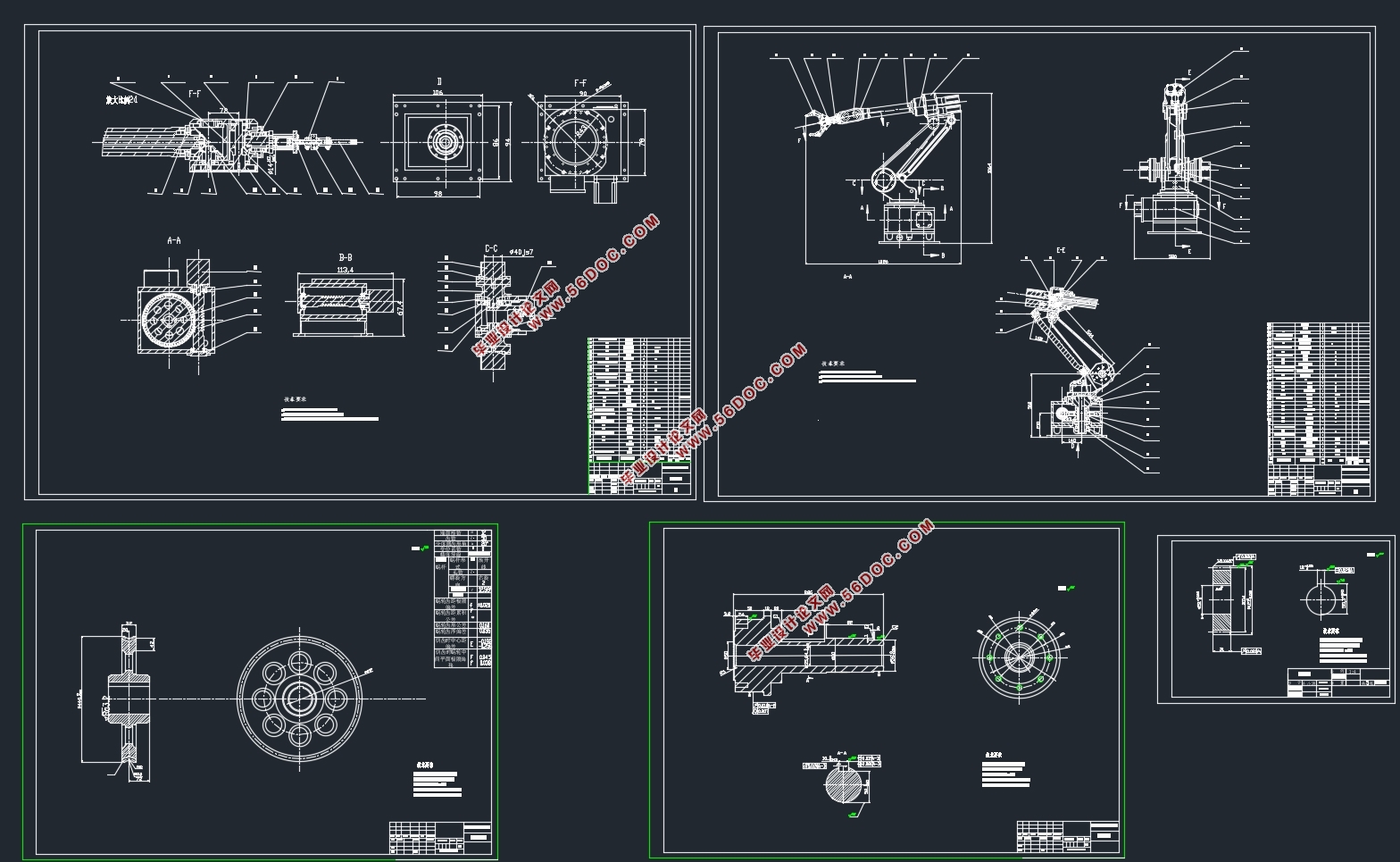
五自由度工业送料机械手的设计(含CAD零件图装配图) 来源:56doc.com 资料编号:5D21856 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D21856 资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助 我要下载该资源 资料介绍 五自由度工业送料机械手的设计(含CAD零件图装配图)(论文说明书17000字,外文翻译,CAD图6张) 机械手主要技术指标 根据机械手的工作要求,其应满足以下技术指标: 1:工件负载>0.5Kg; 2:自由度数:5; 3:末端抓取定位精度<3mm; 4:各关节转速<5rpm。 本课题研究的机械手是五自由度的机械手,有三部分组成包含执行机构、驱动机构、控制机构。运动包含手抓张合、手爪回转、手臂伸缩、手臂回转、手臂升降5个主要运动。 目录 摘 要 I ABSTRACT II 1 绪论 4 1.1 工业机器人的历史、现状及应用 4 1.2 我国的工业机器人 6 1.3 机器人发展趋势 7 1.4 本课题研究的目的与意义 7 1.5 机械手简介 8 1.6运动学分析的常用方法 9 1.7 本课题主要研究内容 9 2 机械手的总体结构设计 10 2.1 引言 10 2.2 机械手主要技术指标 10 2.3 执行机构 10 2.3 本章小结 11 3 机械手的三维建模 12 3.1 软件介绍 12 3.2 机械人总体外形设计 12 3.3 谐波减速器的设计 13 3.3.1 谐波减速器 13 3.3.2腰部结构设计 16 3.3.3 大臂结构设计 17 3.3.4 连杆结构设计 18 3.3.5 小臂结构设计 20 3.1 机械手前端结构的设计 22 3.5本章小结 23 4 机械手手爪的设计计算 24 4.1 手爪设计基本要求 24 4.2 典型的手爪结构 24 4.3机械手手抓的设计计算 24 4.3.1选择手抓的类型及夹紧装置 24 4.3.2 手抓的力学分析 24 4.3.3 夹紧力及驱动力的计算 25 4.3.4 手爪夹持范围计算 27 4.4 机械手手爪夹持精度的分析计算 27 4.5 手指夹紧液压缸的尺寸参数的确定 28 4.6 本章小结 29 5 运动学与动力学分析 30 5.1 引言 30 5.2 关节型机器人二指平动手爪运动学仿真 30 5.3 机械手UG仿真 35 5.4 本章小结 35 6 技术经济分析 37 6.1 技术分析 37 6.2 经济分析 38 结论 40 参考文献 42 外文文献 44 中文翻译 48 致谢 51