直角坐标龙门码垛机械手结构设计(含CAD零件图装配图)(任务书,开题报告,论文说明书18000字,CAD图9张)
摘要
直角坐标机器人,大型的也叫桁架机器人或龙门机器人,其结构简单,功能专一,广泛应用于工业的各个领域,如电子产品、汽车等,主要用于搬运、装码垛以及生产线上的各种工作。随着社会的需求增大和相关技术进步,直角坐标机器人在结构和精密程度上也会进一步的发展。直角坐标机器人的结构如何设计影响着其使用的材料、工作效率以及工作轨迹的规划等,所以研究并应用相关的计算方法,在直角坐标机器人结构设计上进一步优化,具有十分重要的理论意义和实用价值。
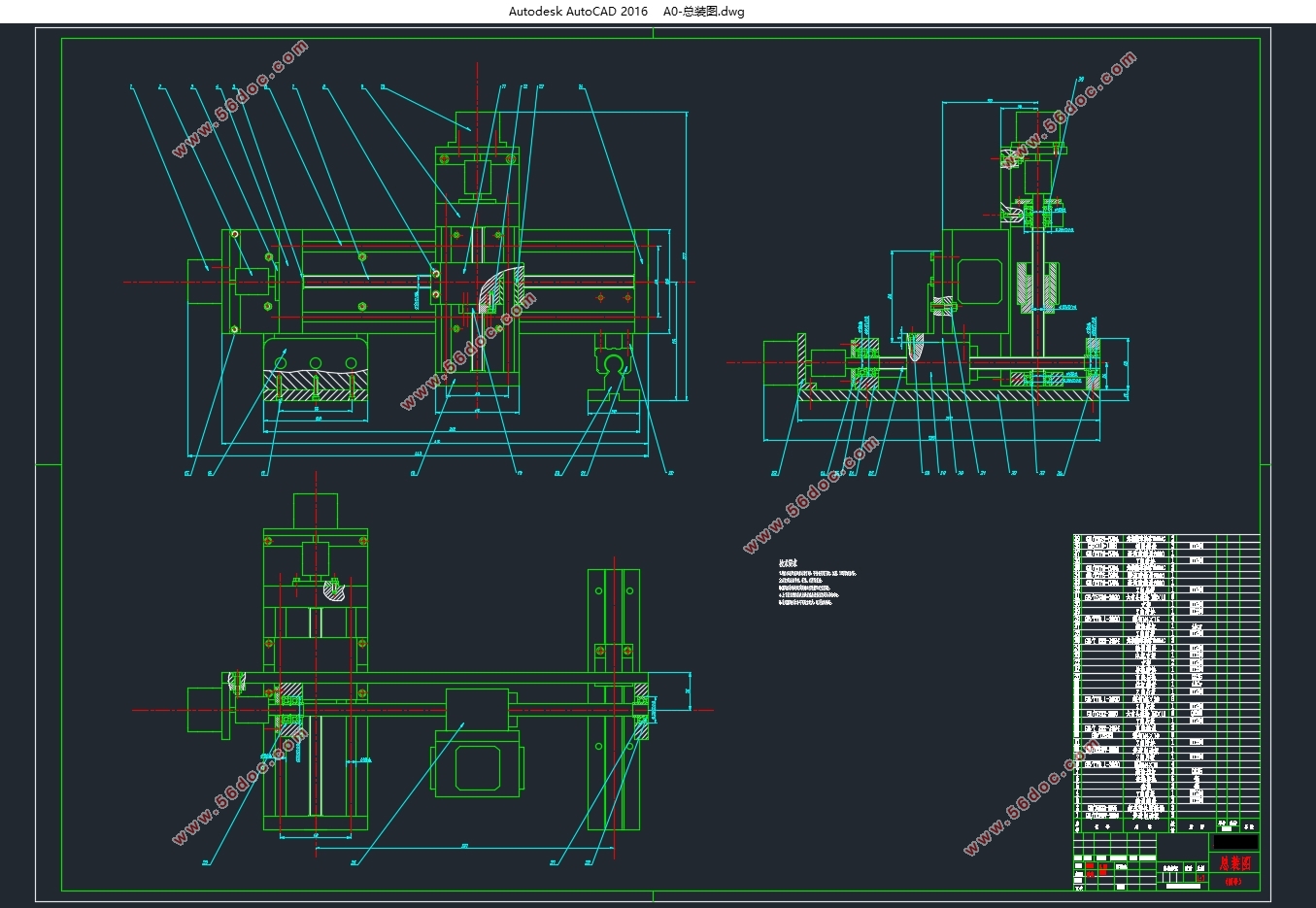
本文设计以小型的直角坐标机器人也叫直角坐标机械手的结构方面进行分析,查阅相关文献资料,通过对直角坐标机械手的功能分析,提出结构设计的总体方案,并通过相关计算,最终选择滚珠丝杠传动并装配以实现在直角坐标3自由度方向上的移动。最终使用SolidWorks软件对零部件分别进行建模,然后装配,并得到整体结构的装配图,通过分析装配图得出设计方案的优劣,然后进行改进。
研究结果表明采用本文的结构设计方案简易明了,传动方案简单且便于选型修改,整体设计方案能够满足所给的直角坐标机械手的框架结构和行程要求。
关键字:直角坐标机械手;机构设计;滚珠丝杠传动方案
Abstract
Cartesian coordinate robot, the robot is also called the large truss or Longmen robot, which has the advantages of simple structure, single function, widely used in various industries, such as electronics and automobiles, mainly used for handling, palletizing and various production. With the increase of social demand and related technical progress, the structure and precision of Cartesian coordinate robot will be further developed. Influence of the use of materials, work efficiency and work trajectory planning how to design the structure of the robot, so the research and application of computational methods, further optimization in the Cartesian coordinate robot structure design, has very important theoretical significance and practical value.
The structure of this design with small rectangular coordinate robot also called Cartesian coordinate manipulator were analyzed, relevant literature based on Cartesian coordinate manipulator function analysis, puts forward the overall scheme of structure design, and through the relevant calculation, the final choice of ball screw drive assembly and moving to realize the Cartesian coordinates of 3 degrees of freedom direction the. Finally, the SolidWorks software is used to model the parts and components, and then assemble and get the assembly drawings of the whole structure. Then the design scheme is proved to be good and bad after analysis of the assembly drawings, and then improved.
The research results show that the structure of this design program is simple and clear, simple and easy to modify the transmission scheme selection, the overall design scheme can meet the frame structure and stroke Cartesian coordinate manipulator to the requirements.
Key words:rectangular coordinate manipulator; mechanism design; ball screw drive scheme
1.基本参数:工作空间要求,长×宽×高=100mm×100mm×60mm;工作负载,0.5kg
2.总体方案分析及设计
3.主要零部件的设计与校核。
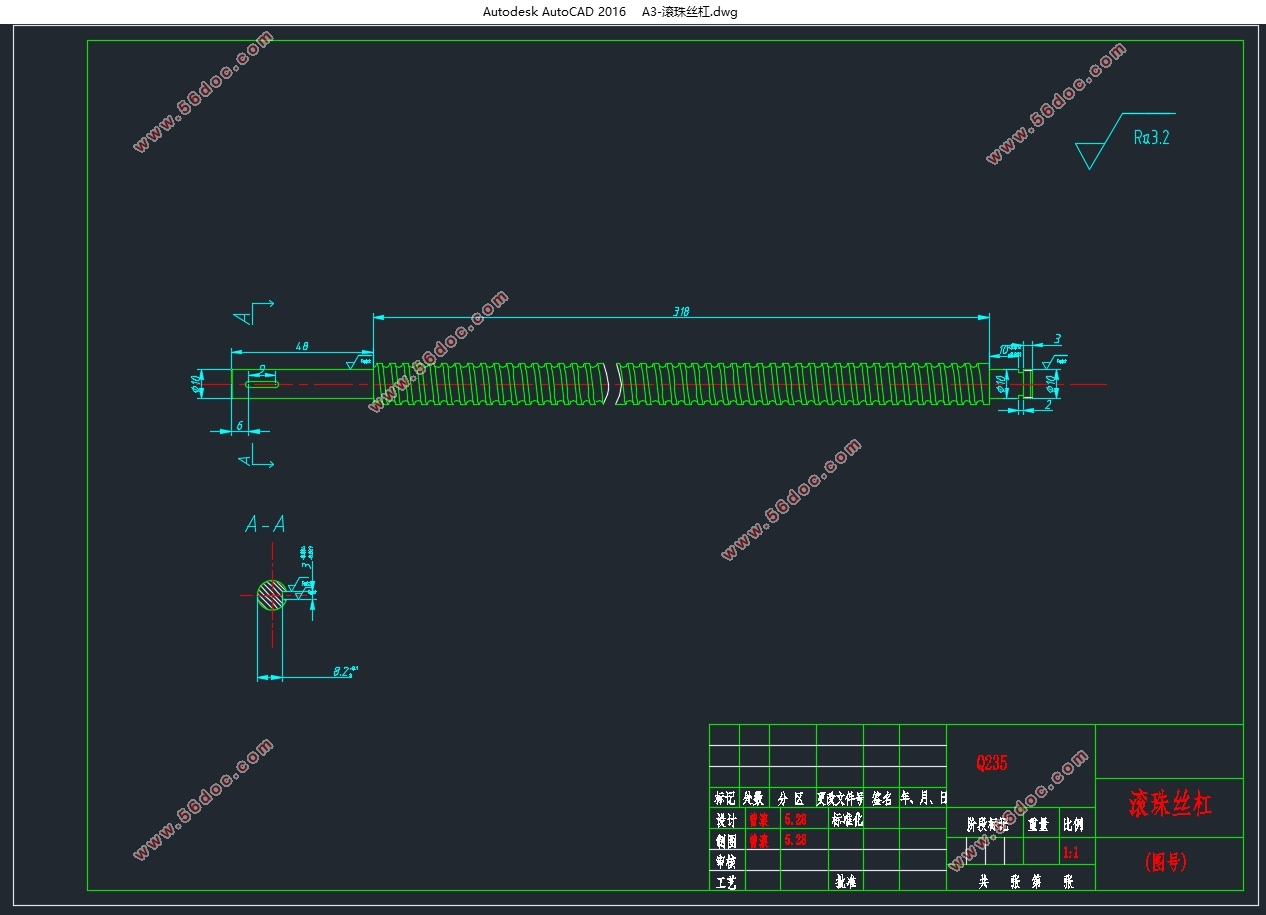
其主要目的是完成直角坐标龙门码垛机械手的结构设计,实现机械手在XYZ三个方向上的移动,由于机械手的工作行程比较小,所以为了实现机械手各个自由度方向上的传动,我将它们都采用相同的传动方式——滚珠丝杠传动,这样做有两个好处,一是为了使整体机构更协调和紧凑,二是方便机械手各运动模组零件的加工。所设计机械手能够抓取一定质量的工件,一些简单的功能如搬运、上下料功能都能够实现,而且机械手具有较高的定位精度以及运动平稳性。
设计内容包括机械手总体设计方案的分析确定,包括主体部分结构设计、手爪的设计以及各零部件的校核。在设计过程中要考虑到很多问题,所涉及的关键问题有:机械手直线运动模块执行元件的选择,即电机的选型;机械手传动机构的设计,即滚珠丝杠副的选择和导向机构的设计;丝杠支撑结构的设计等等。

目录
第一章绪论 1
1.1 选题背景及其意义 1
1.2 国内外研究现状分析 1
1.2.1 国外研究现状 1
1.2.2 国内研究现状 2
1.3 本设计主要研究的内容 3
第二章直角坐标龙门机械手总体方案设计 5
2.1 机械手的应用与分类 5
2.1直角坐标龙门机械手驱动方式的选择 6
2.2 直角坐标龙门机械手传动方式的选择 8
2.3我所设计的机械手的外观结构图 9
2.4设计思路 9
第三章机械抓手的设计 10
3.1概述 10
3.2真空吸盘的选择 11
第四章 手臂结构的设计 12
4.1 Z轴运动模组的设计 12
4.1.1 滚珠丝杠螺母副的设计 13
4.1.2滚动轴承的选择与校核 17
4.1.3步进电机的选择 19
4.1.4移动滑块的设计 20
4.1.5轴承端盖的设计 21
4.1.6联轴器的选择 22
4.2 Y轴运动模组的设计 22
4.2.1滚珠丝杠螺母副的设计 23
4.2.2滚动轴承的选择与校核 26
4.2.3步进电机的选择 27
4.2.4移动滑块的设计 28
4.3X轴运动模组的设计 28
4.3.1滚珠丝杠螺母副的设计 29
4.3.2滚动轴承的选择与校核 31
4.3.3步进电机的选择 33
4.3.4移动滑块的设计 33
第五章结束语 35
参考文献 36
致谢 37
|
