四自由度装卸料工业机器人转动机构设计(含SolidWorks三维图)
来源:56doc.com 资料编号:5D25487 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D25487
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
四自由度装卸料工业机器人转动机构设计(含SolidWorks三维图)(任务书,开题报告,论文说明书11000字,SolidWorks三维图)
摘要
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能根据所输入的命令指令程序自动地执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。
工业机器人由主体、驱动系统和控制系统三个基本部分组成,根据不同的实用环境,工业机器人有多种类,例如点焊用的焊接工业机器人,装卸料用的装卸料工业机器人等。
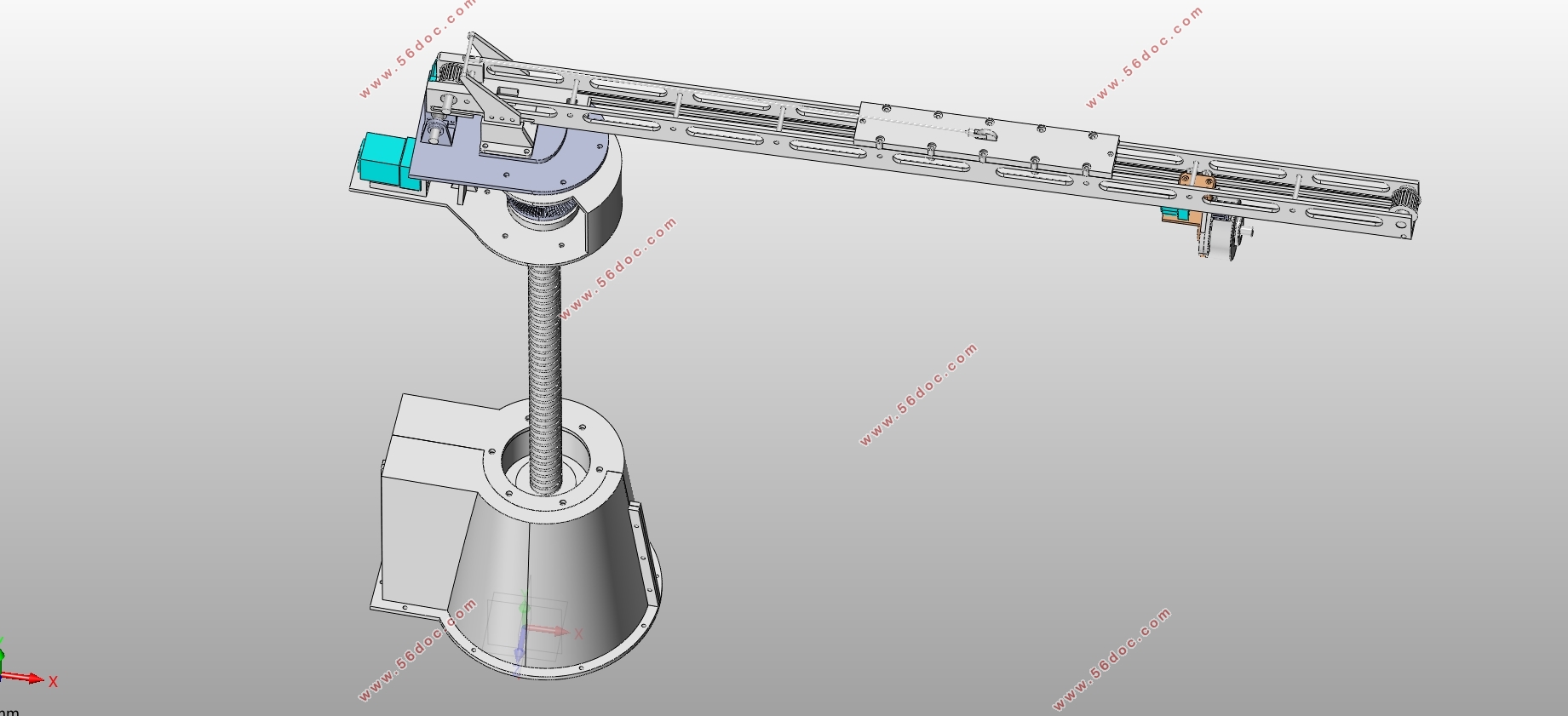
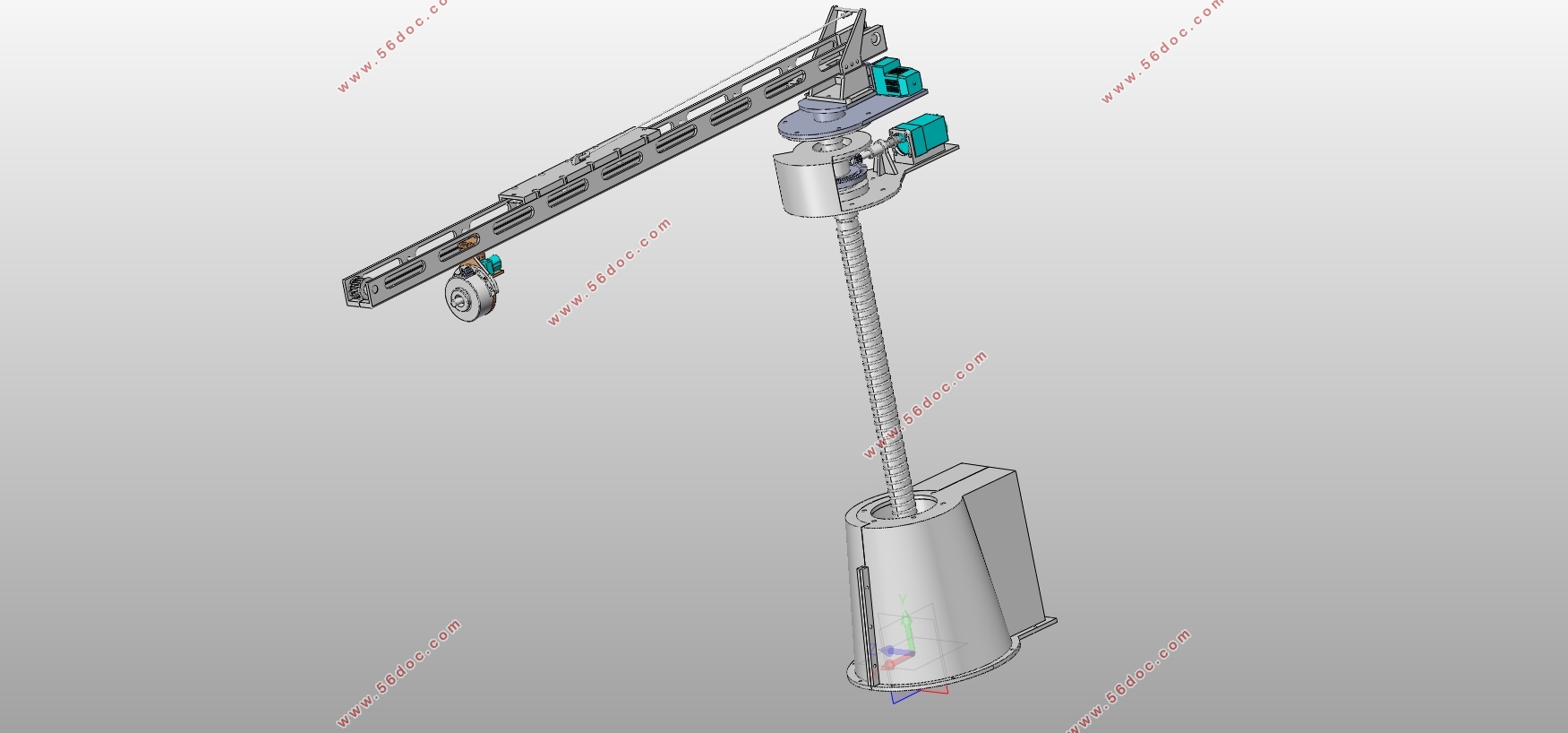
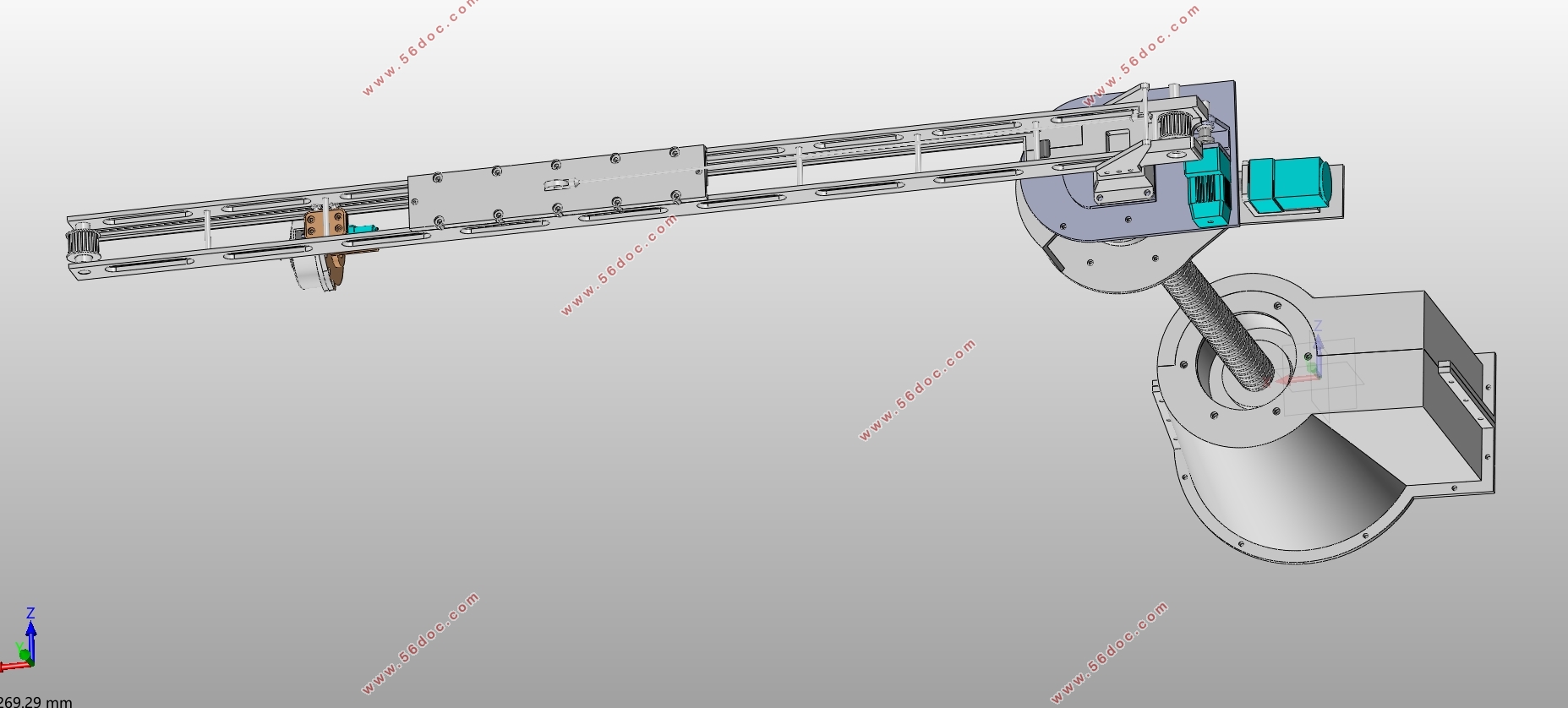
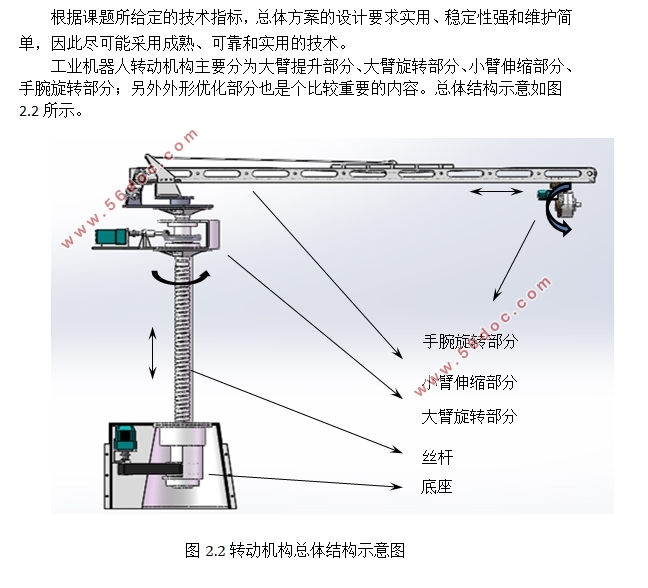
本论文的内容是对装卸料工业机器人的转动机构作出的设计,设计将从方案设计、机械系统结构设计、控制系统方案设计三个方面展示出该机器人的转动机构的具体工作特性。该工业机器人拥有四个运动自由度,包括大臂伸缩、大臂旋转、小臂伸缩、手腕旋转动作,由这些动作的合成与协调,从而可以完成装卸料等功能。
关键词:工业机器人;装卸料;转动机构;结构设计;控制系统
Abstract
Industrial robot is facing multi-joint manipulator or multiple degrees of freedom machine device in the field of industrial. It can execute work automatically based on input command program, which is under their own power and control ability to realize vwrious functions of machine.
Industrial robot consist of main body、drive system and control system. According to the practical environment, industrical robot have mang types, such as spot welding with welding industrial robots, loading with loading industrial robots etc.
the content of this paper is some designs about the loading industrial robots' rofating mechanism, which will show the robot's scheme design、structural design of mechanical system and contorl system. The industrial robot has four degrees of freedom of movement, including the big arm escalation、The big arm rotation、Wrist escalation and rotation. Thereby, It can complete the basic function of loading by these actions' synthesis and coordination.
Key Words:Industrial robots ; loading with loading; rotation mechanism; structure design; control system
2.1 装卸料机器人转动机构的技术指标
本设计课题的基本内容:完成装卸料工业机器人转动机构部分设计。
工业机器人相关技术参数如下:
承载能力:40kg;
自由度数: 4;
位移范围:手臂水平面转动:340°,水平提升:800mm,手臂伸出:1500mm,手腕相对纵轴转动:90°;
位移速度:手臂转动:150°/s,水平提升:0.6m/s,手臂伸出:1.5m/s,手腕转动:90°/s。
2.2 拟采用的方案与措施
2.2.1研究方案:
结合所给的工业机器人技术指标,先初步确定转动机构的机械结构。包括工业机器人的各部分结构选用,例如大臂抬升、大臂转动、小臂伸缩等结构的选用与设计;
对工业机器人的运动过程进行分析,并计算出相关机构运动的功率,这里选用电机驱动,由此推算出所选电机最低功率;
根据计算分析所得的结果,去网上找到合适的电机,减速器以及其他非标准件的实物,以利于之后的建模与分析;
根据所选用的电机、减速器和其他物件,利用SolidWorks进行三维建模,然后设计出一个合适的壳体底座,同时将之前确定的各部分方案的设计进行建模后,在基于SolidWorks平台将其装配到一起,组装成工业机器人转动机构总体设计模型;
通过分析,对模型进行外型优化,设计出合理顶部外壳模型。将现有机构进行拓展,分析是否有其他更优方案;
基于之前对零件的选型,进行四自由度工业搬运机器人控制系统方案设计。
目录
第一章绪论 1
1.1 研究背景与意义 1
1.2 国内外研究现状 1
1.3 工业机器人在生产生活中的应用 3
1.4 工业机器人未来发展方向 4
第二章技术指标与总体结构设计 6
2.1 装卸料机器人转动机构的技术指标 6
2.2 拟采用的方案与措施 6
2.2.1研究方案 6
2.2.2 技术路线 7
2.3.2 大臂旋转部分 9
2.3.3 小臂伸缩部分 10
2.3.4 手腕旋转部分 11
第三章各部分结构部件的选用 12
3.1 大臂提升部分的结构部件的选用 12
3.1.1 大臂提升部分的丝杆结构选型 12
3.1.2 大臂提升部分的电机选型 14
3.1.3 带传动的选择 16
3.5 联轴器的选用 20
3.3.1 联轴器的种类及选用原则 20
3.3.2 选用的联轴器结构与参数 21
第四章工业机器人运动控制系统方案设计 23
4.1 工业机器人运动控制系统的设计原则 23
4.2工业机器人运动控制系统总体设计方案 24
4.2. 1硬件系统控制方式的选择 24
4.2.2 硬件系统方案比较及选择 25
4.2.3 系统总体架构 26
4.3 工业机器人运动控制系统软件总体设计方案 28
4.3.1 程序执行方式的选择 28
4.3.3运动控制语言解释系统架构 29
4.4 本章小结 30
总结与展望 32
参考文献 33
致谢 35
|