污水管道探测机器人系统设计及控制(含CAD零件图装配图)(论文说明书10000字,CAD图5张)
摘要
通过对污水管道近况的分析,结合移动机器人的机械本体构造,工作环境的要求,采用模块化设计方法,设计其对应的机器人控制系统。由于该类型机器人涉及多个研究范畴,这也就意味着研究的难点在于让机器人自己懂得完成特定的任务,特别是针对未知复杂的动态状况。
本设计围绕污水管道机器人涉及的内容展开,从机械本体结构、控制系统理论及相应的信息处理技术等方面进行阐述。论文首先阐述污水管道机器人的概念以及发展现状,结合应用实例介绍本体设计的相关技术,提出机器人的系统硬件设计和软件设计的基本思路。恶劣的管道环境,这对机器人的设计要求很高,通过对机器人的约束分析,处理其自由空间运动控制问题。对于污水管道机器人系统的视觉控制,目标估计相机位置与方向的问题可以通过解析与数值两种技术解决。
最后,对整个污水管道机器人的系统平台进行完善,并对机器人进行测试,记录相关参数,确保其每个功能性能优良。
关键词:污水管道探测;控制系统; 本体设计
Design and control of the sewage pipeline detection robot system (2 type)
ABSTRACT
By analyzing the status of domestic sewers, combined sewers robot machine body structure, requiring the work environment, the use of modular design, the design of its corresponding robot control system. Because the sewage pipe robot involved in mechanical design, sensor technology, computer technology, control technology, machine vision, artificial intelligence and other areas of research, which means that robot research difficulty is how to make robots in unknown complex dynamic environment complete independence a particular task.
The robot is designed around content related to sewers commencement elaborated from mechanical body structure, control systems theory, and information processing technology and other aspects. Firstly elaborate concept and development status sewers robot, combined with application examples described the body design of the related art, the basic idea proposed system hardware design and software design of the robot. Harsh environment pipeline, which is demanding the robot design, robot through the constraints analysis, processing the free space motion control problems. For visual control sewer robot system, the target camera position and orientation estimation problem can be produced by two techniques to solve analytical and numerical.
Finally, the entire sewer system platform to perfect the robot, and the robot for testing, recording parameters to ensure good performance of each of its functions.
Keywords:Sewers detection; control system; body design
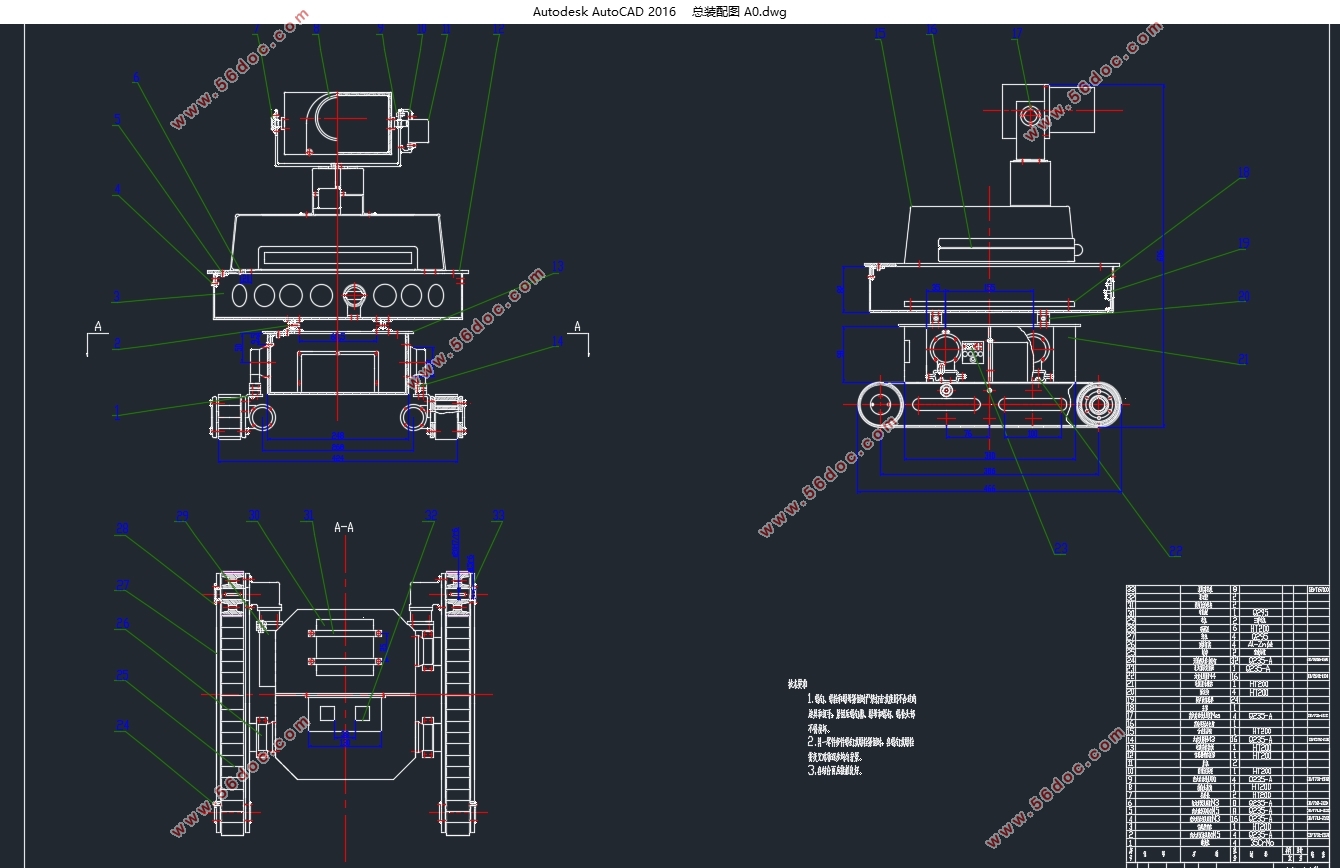
机械系统的设计
探测机器人的机械本体设计是机器人整个设计的基础,至关重要,因为只有具备了高效稳定的机器人“身躯”,即机械本体,才能在其控制系统的指挥下很好地完成指定的任务。
对于机器人的结构来说,要想满足作业的要求,一般需要依照以下原则:
①必须能够完成设计方案所规定的动作指标。
②必须具备较高的可靠性。
③维护维修的过程简便。
④所用的结构材料重量轻,强度刚度好。
⑤在保证功能的前提下充分提高机构的精妙性。
⑥充分考虑电气控制技术实现的可能性,降低对控制的要求。
目 录
摘要 I
ABSTRACT II
第一章 概述 1
1.1 机器人的应用范围 1
1.2 移动机器人的现状及发展 3
1.3 研究内容 4
第二章 管道机器人本体设计 4
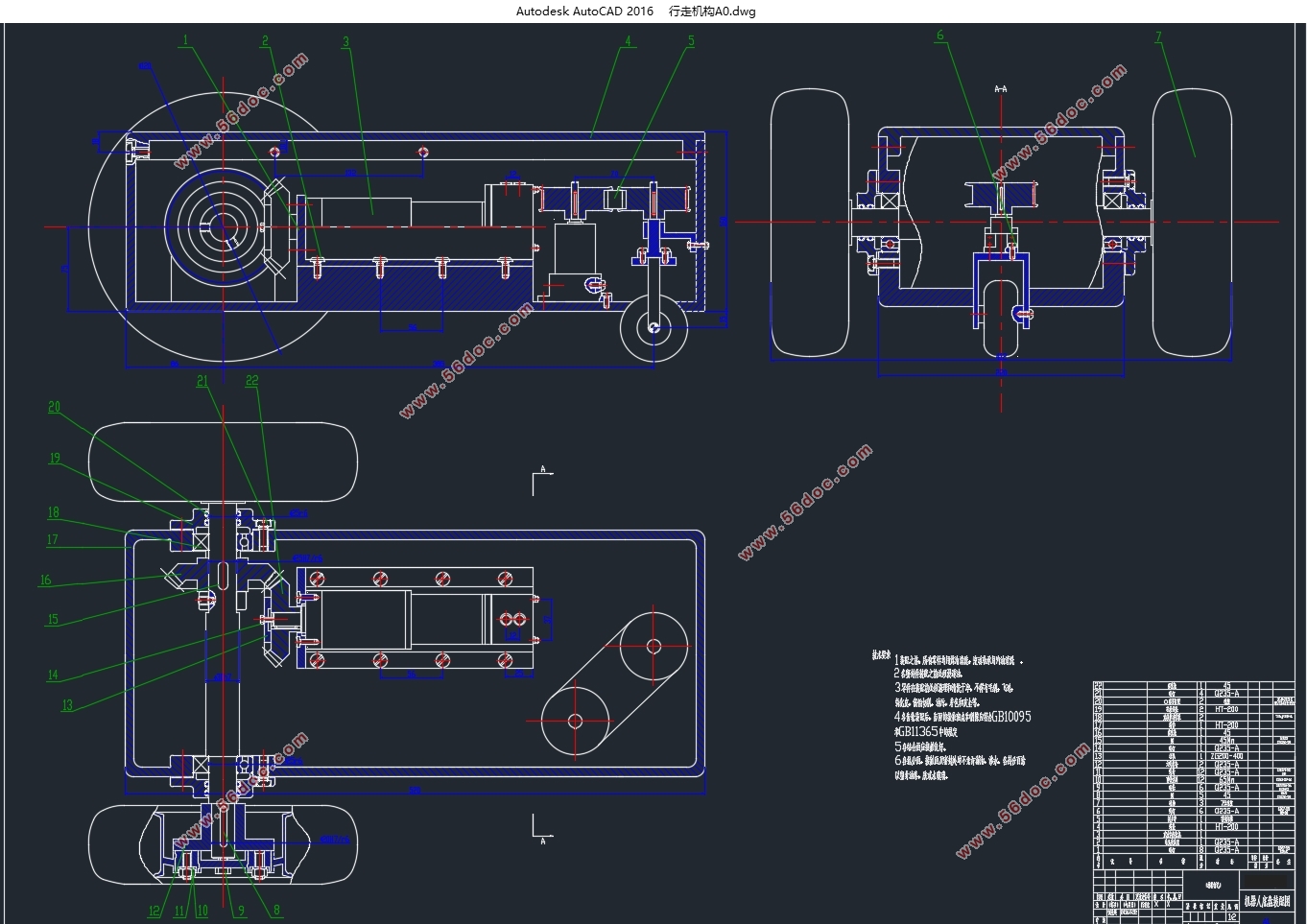
2.1走行机构概述 5
2.2走行电动机选型 6
2.3走行机构设计 9
2.4计算机模块设计 10
2.5底盘结构设计 12
2.6提升机构设计 15
第三章 能源驱动的设计选择 17
3.1能源的供给 17
3.2电机的选用 18
3.3电机驱动的选择 19
第四章 传感器系统的设计 20
4.1视觉传感器 21
4.2超声波传感器 22
4.3红外传感器的配置 24
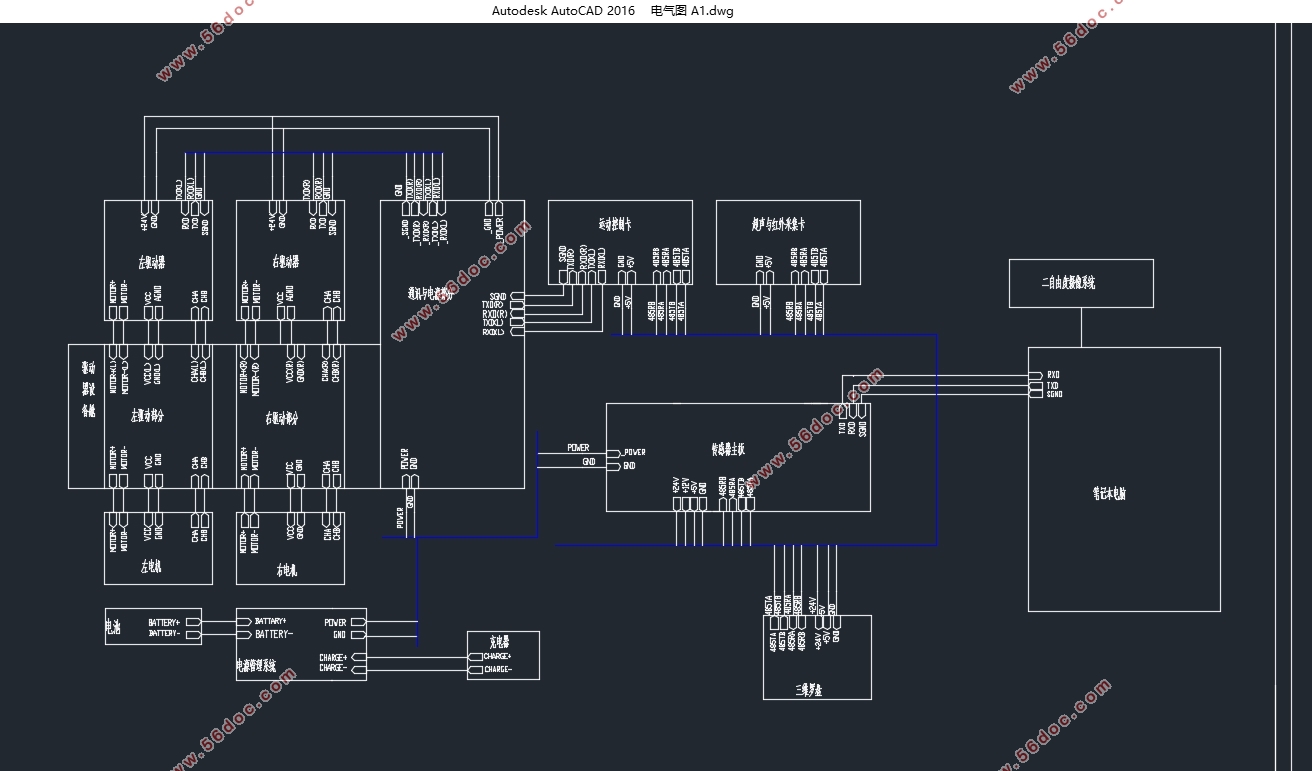
4.4传感器采集系统 24
第五章 污水管道探测机器人的硬件系统 25
5.1电源保护电路 25
5.2红外传感器的接线 26
5.3转换电路 27
5.4罗盘处理 28
5.5超声波传感器的接线 28
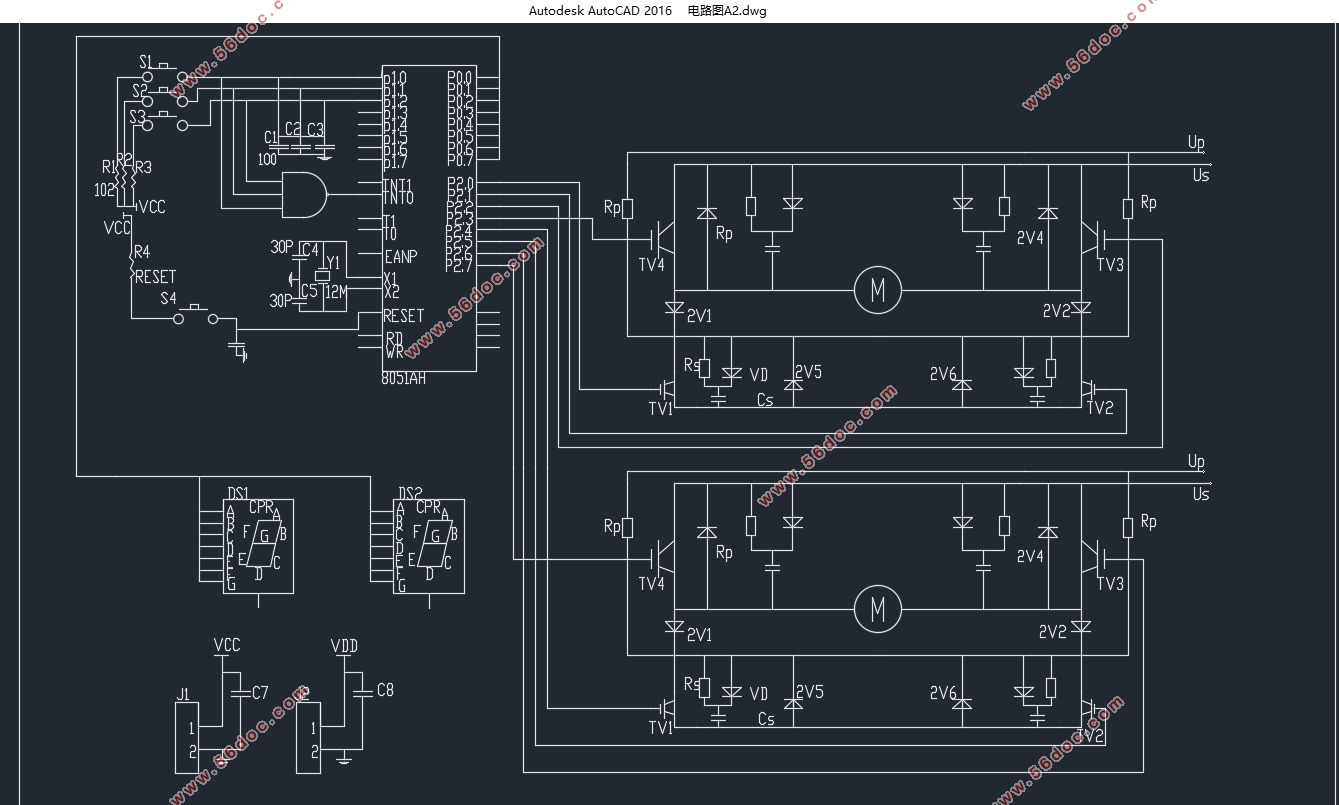
5.6电机调速系统控制原理 29
第六章 污水管道探测机器人软件系统的开发 31
6.1软件系统设计概要 31
6.2软件系统总体设计 31
6.3软件抗干扰技术 33
结语 35
参考文献 36
致谢 38
|
