三吨三轮多模式转向电动叉车液压系统动态分析与设计(含CAD图)(任务书,开题报告,论文说明书22000字,CAD图5张)
摘要
随着国民经济的不断发展,叉车越来越多的运用到工业生产中,但对土地等空间资源的需求也越来越紧张,同时,随着人们对环境质量要求的提高,车辆尾气的污染物排放也受到了严格的限制,而目前国内叉车普遍使用的平衡重式内燃叉车已经越来越不能满足上述要求,因而本文提出了一种新型驱动形式的液压电动叉车,此种叉车的转向灵活性大,作业空间小,使用范围广,并且驱动形式为电动,实现了零排放。
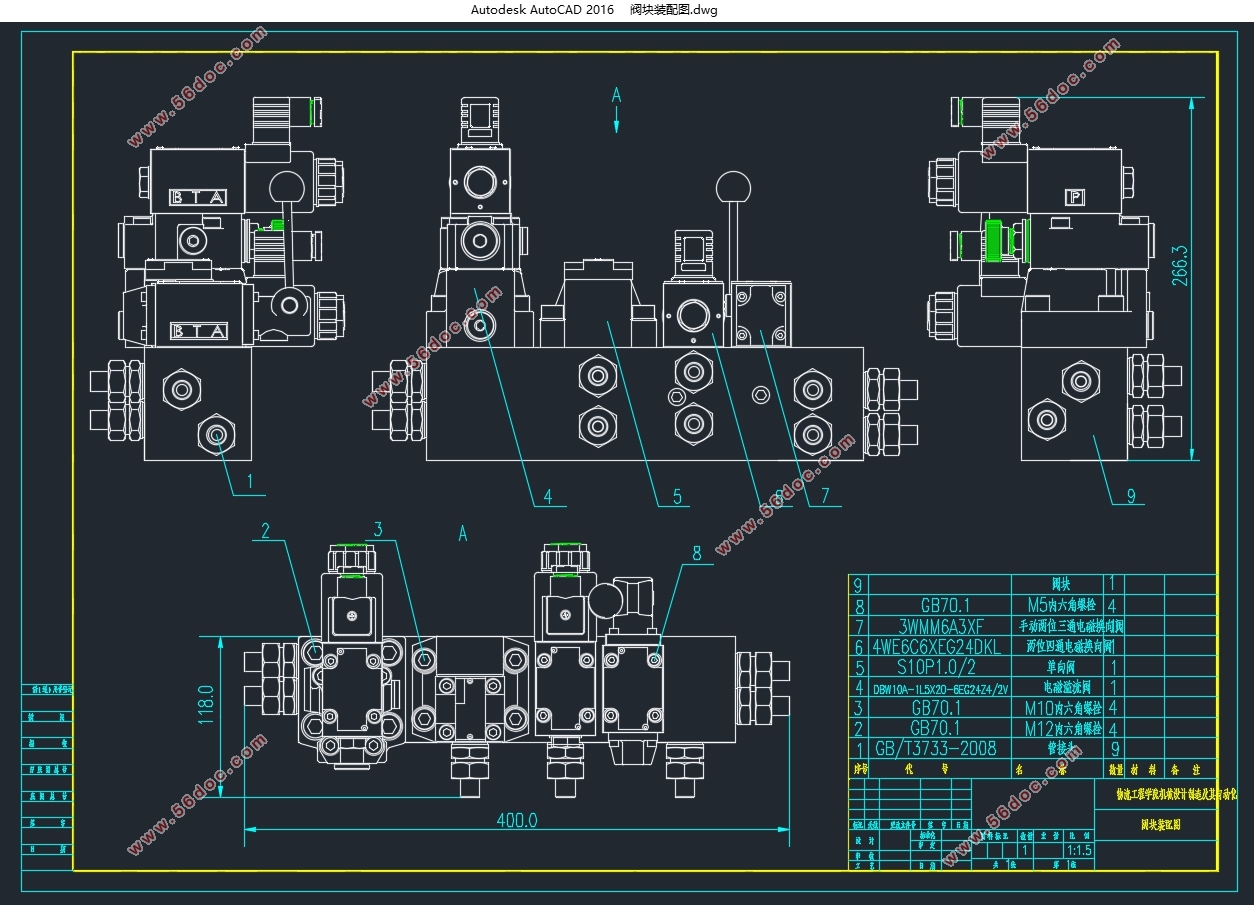
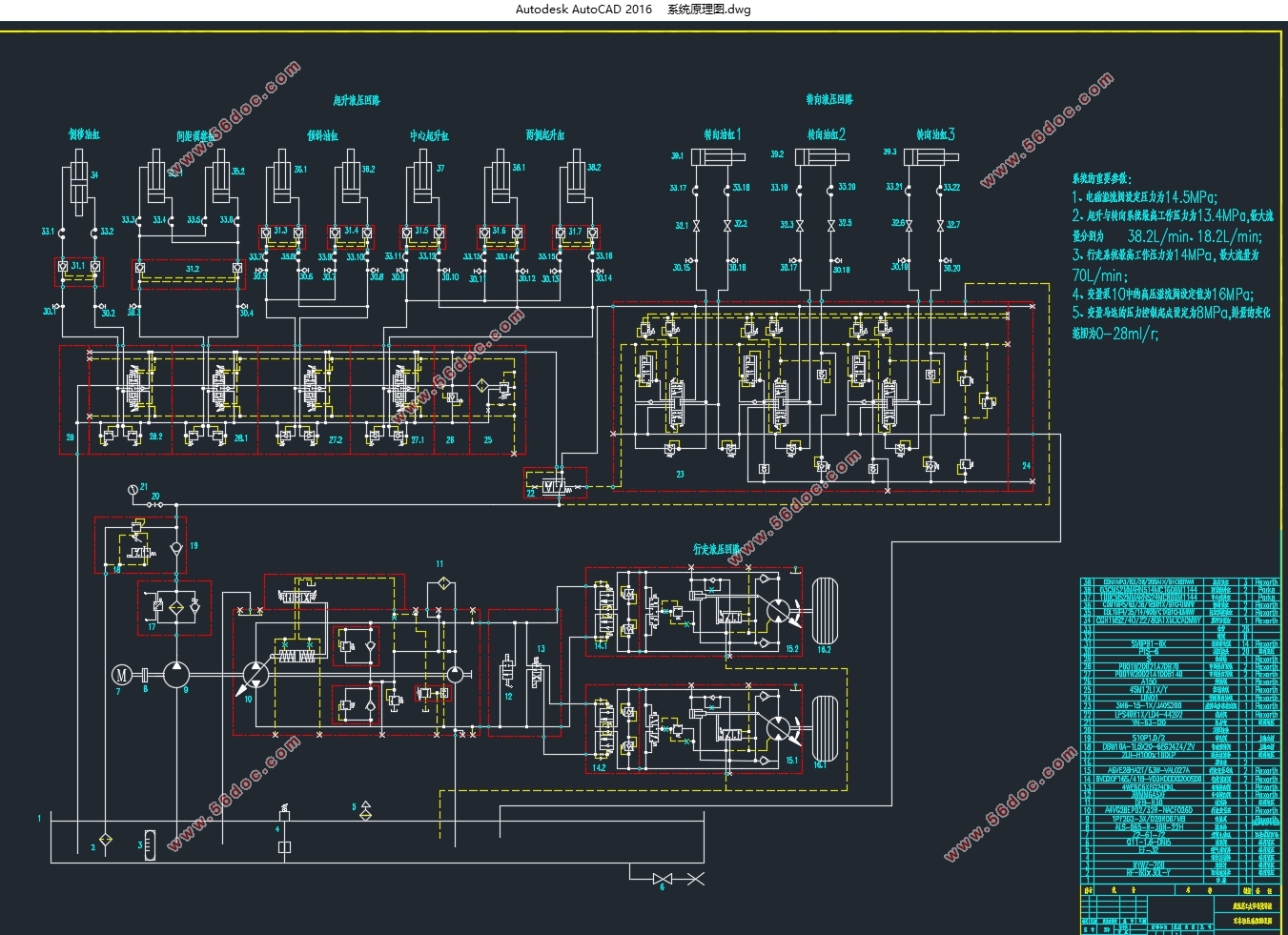
本文首先根据叉车应具备的作业性能对叉车三大系统的总体设计方案做了相关介绍,并分配了叉车的转向模式,接着对叉车的运动学和动力学进行了相关分析,得出了叉车转角与转向轮偏转角、车速、转向时间的关系,在此基础上,建立了叉车行走的两自由度模型,得出了叉车侧偏角、横摆角速度与叉车所受侧向力、车轮转角以及车轮特性之间的关系。最后设计了叉车三大机构的液压系统,并分析了各部分的作用与叉车有关性能的实现形式,计算选型出了相关液压元件,得出了整个液压系统的原理图。针对三轮独立转向,我着重研究了转向时三个轮子之间满足的转角关系以及转向的控制形式和控制性能。
本文设计的叉车达到了基本的设计要求,论文涉及到了叉车设计过程中的理论分析、性能要求和系统原理的呈现,该叉车已经在国外大量生产,畅销全球。
关键词:三轮独立转向、叉车、液压、电动
Abstract
With the continuous development of national economy, the forklifts are more and more applied to industrial production. But now the demand for land and other space resources is also getting more and more intense. At the same time, with the improvement of environmental quality requirements, the emission of pollutants from vehicle exhaust has been strictly limited. And the current domestic commonly used balance weight type internal combustion forklift has increasingly unable to meet the above requirements. Therefore, this paper puts forward the newly hydraulic electric forklift. This kind of forklift steers flexibility, has small operation space, and drives in the form of electric realizing zero emissions.
According to the operating performance of the forklift truck, this paper firstly introduces the overall design scheme of the three major systems and distribute the steering mode. Then, analyzes the kinematics and dynamics of the forklift truck. Obtains the relationship between deflection angle and speed and steering time. In the base of this, established forklift two degree of freedom model and obtain the relationship between the forklift side slip angle, yaw angular velocity and forklift side force, steering angel and wheel characteristics. Finally ,design three bodies of forklift hydraulic system, and analyzes the roles and the way of forklift’s performance, calculate and select of the hydraulic components. Obtain the schematic diagram of hydraulic system. Aiming at the three wheel independent steering, I focus on the relationship between the steering wheel and the steering wheel, the steering control mode and the control performance of the three wheels.
In this paper, the design of forklift reaches the requirements. The paper relates to the theoretical analysis, performance requirements and the principle of the system in the design process of the fork lift truck .The forklift has in a large number of foreign production sell well all over the world.
Keywords: Three wheel independent steering, forklift, Hydraulic, Electric

目 录
摘要 I
Abstract II
第1章 绪论 1
1.1 电动多模式转向液压叉车的研究背景与意义 1
1.2 国内外叉车技术的发展现状 1
1.3 叉车设计中的关键问题 2
1.3.1 转向模式的确定 3
1.3.2转角关系的确定 3
1.4本文涉及的主要内容 3
第2章 电动叉车总体设计方案的确定 4
2.1叉车设计的要求 4
2.2 总体方案的确定 4
2.2.1 主控制器的控制方案 4
2.2.2起升机构的设计方案 4
2.2.3转向系统的设计方案 6
2.2.4行走系统的设计方案 9
2.3转向模式的分配 9
2.3.1正常直线行驶转向模式 10
2.3.2定角度直线行驶转向模式 12
2.3.3钟摆和回转运动模式 13
2.4本章小结 15
第3章 叉车的力学运动学及性能分析 16
3.1叉车的运动学分析 16
3.2叉车行走时车轮的受力分析 19
3.2.1静态受力分析 19
3.2.2动态受力分析 21
3.3三轮叉车独立转向两自由度动力学建模 22
3.4本章小结 27
第4章 叉车的液压系统的设计计算与分析 28
4.1起升机构的设计与分析 28
4.1.1起升系统的分析 28
4.1.2起升机构设计计算与元件选型 29
4.2行走机构的设计与分析 33
4.2.1行走系统的分析 33
4.2.3行走系统的设计计算与选型 36
4.3转向机构的特性分析 37
4.3.1转向的性能分析 37
4.3.2转向的设计计算与选型 38
4.4优先阀的作用 42
4.5本章小结 42
第5章 经济性分析 43
第6章 总结与展望 44
6.1总结 44
6.2展望 44
参考文献 45
致谢 46
|
