五指灵巧手结构设计(含CAD零件图装配图)(任务书,开题报告,文献摘要,论文说明书15000字,CAD图17张)
摘 要
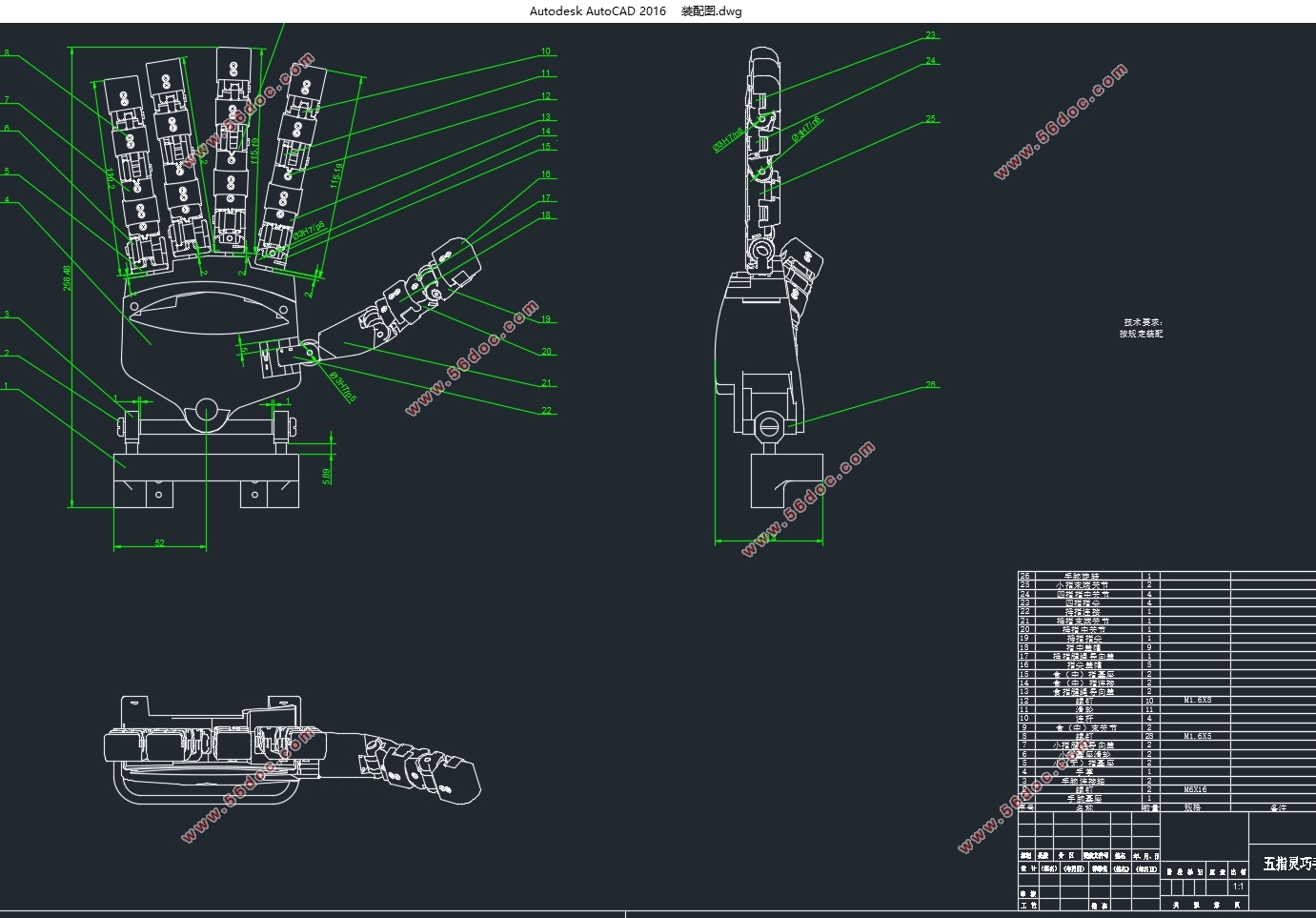
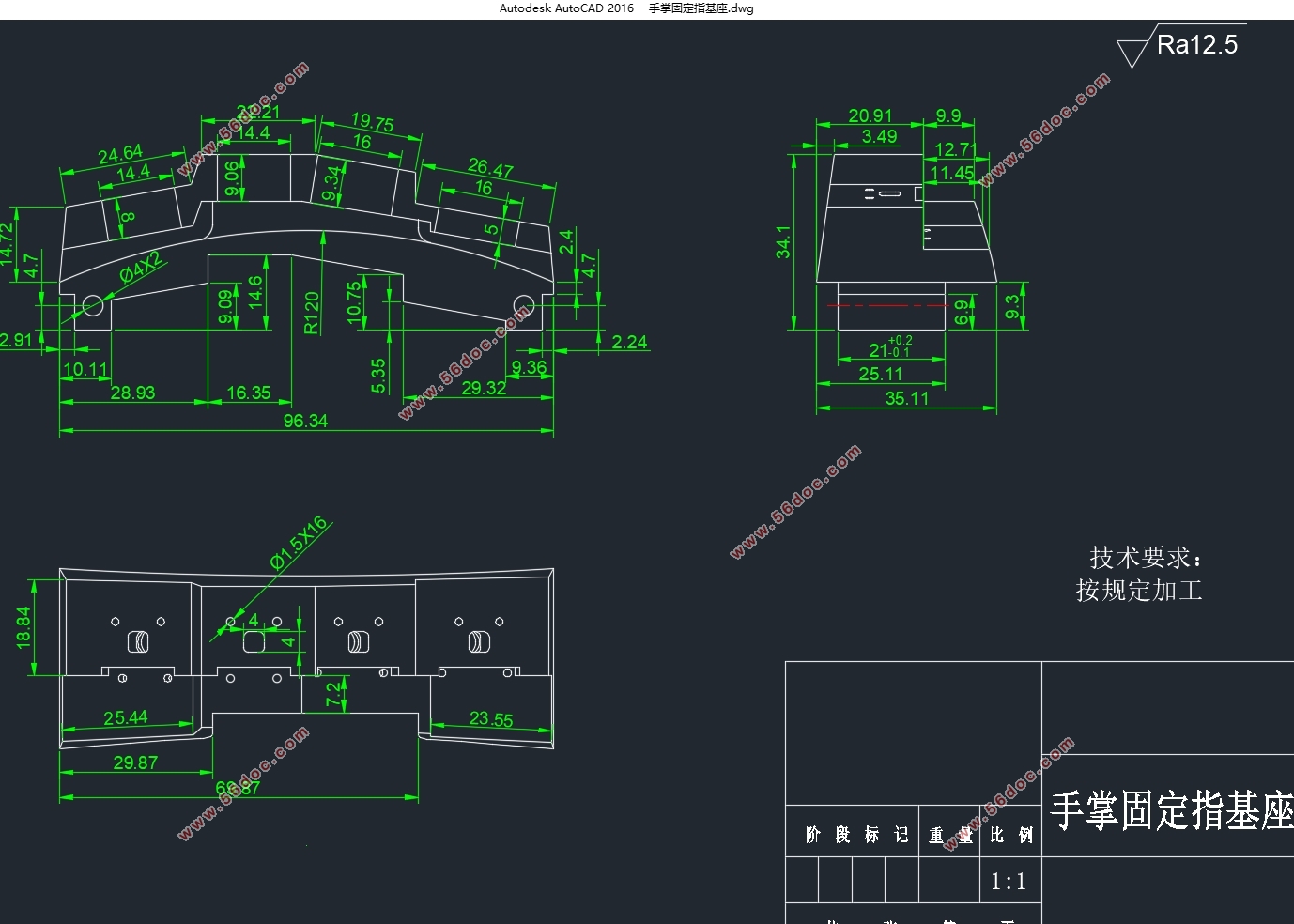
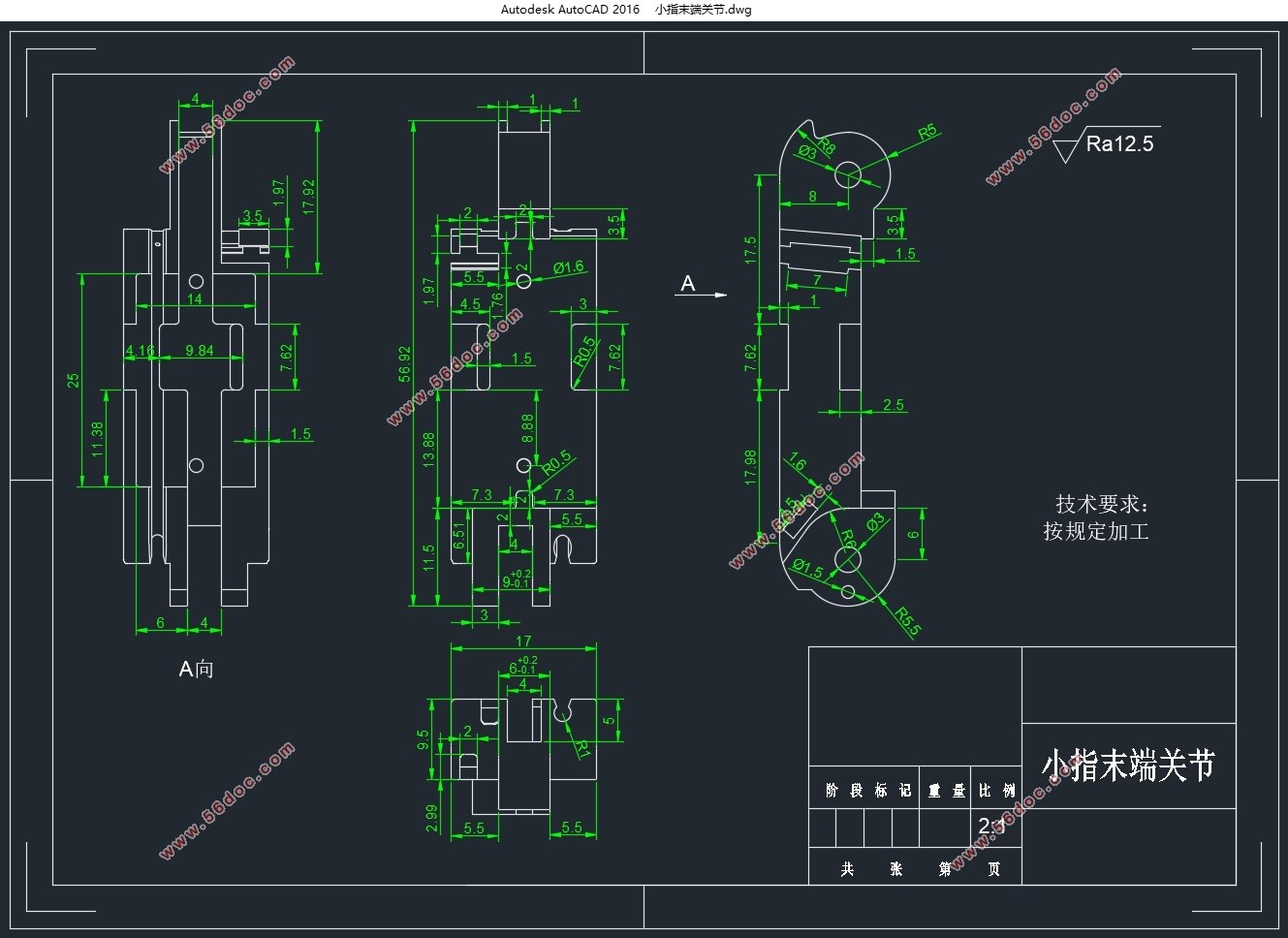
近些年来,随着机器人技术的发展,多指灵巧手逐渐代替了传统机器人的末端夹持器,被应用在了航空航天、核能开发、海洋勘探等很多高新技术领域,无论是国内或者国外,多指灵巧手都得到了迅猛的发展,涵盖了机械、材料及控制等学科,并逐渐成为了一个专门的研究领域。为迎合以上发展需求,本文设计了一种由腱驱动的五指灵巧手,包括手掌和手指的结构设计,以及腱绳驱动方案的研究。
论文首先以人手的生理结构及骨骼解剖为理论基础,得出灵巧手各手指所需自由度数,完成了灵巧手机械结构设计,这其中包含关节耦合机构的设计;进而分析腱绳传动原理,并设计了腱张力分配算法;同时完成了腱绳材料及驱动电机的选型,并设计了相应的驱动机构;最后为检验设计方案能否达到合理的效果,对五指灵巧手完成了ADAMS的运动学及动力学仿真,结果表明方案设计合理可行。
关键词:五指灵巧手;腱绳驱动;结构设计;ADAMS仿真
Abstract
In recent years, with the development of robot technology, multi fingered dexterous hand gradually replaced the traditional robot end of the gripper, is used in many areas of High Technology such as aerospace, nuclear energy development, ocean exploration and so on, whether domestic or foreign, multi fingered dexterous hand has been the rapid development, covering machinery, materials and control subjects, and gradually become the a special field of study. In order to meet the above needs, this paper designs a tendon driven fingers dexterous hand, including the structural design of the palm and fingers, as well as the tendon rope driving scheme.
Firstly, with the hand physiological structure and skeletal anatomy as the theoretical foundation, obtains the dexterous hand with each finger of the required number of degrees of freedom, the dexterous hand mechanical structure design, which includes joint coupling mechanism design.And then analyzes the transmission principle of tendon rope, and the design of the tendon tension distribution algorithm.Tendon rope material and the drive motor selection, and design the corresponding drive mechanism.To test design scheme if can achieve reasonable results, completed the kinematics and dynamics simulation of Adams of the five fingered dexterous hand and the results show that the design scheme is reasonable and feasible.
Key Words:five fingered dexterous hand;tendon rope drive;structure design;ADAMS simulation
目录
第一章绪论 1
1.1 项目的研究背景及意义 1
1.2 国内外的研究现状分析 2
1.2.1 内置型多指灵巧手的国内外现状 2
1.2.2外置型多指灵巧手的国内外现状 4
1.3 本文的研究内容及预期目标 6
第二章仿人五指灵巧手机械结构设计 7
2.1 引言 7
2.2 五指灵巧手的设计原则 7
2.3 五指灵巧手设计的理论基础 7
2.4 灵巧手机械结构设计 9
2.4.1 灵巧手整体设计 10
2.4.2 灵巧手手指设计 11
2.4.3 四连杆耦合机构的设计 13
2.4.4 腱绳传动系统 14
2.4.5 腱绳固定装置 16
2.4.6 关节处各个腱绳的张力分配 17
2.4.7 前臂和手腕的结构设计 18
2.4.8 腱绳材料及驱动部件的选型 19
2.4.9 腱绳及腕部驱动机构 20
2.5 本章小结 21
第三章仿人五指灵巧手的ADAMS仿真 22
3.1 仿真软件的选用及模型的导入 22
3.2 灵巧手的运动学仿真 23
3.3 灵巧手的动力学仿真 24
3.4 本章小结 26
第四章总结与展望 28
4.1 全文总结 28
4.2 研究展望 28
4.3 经济性分析 28
参考文献 30
致谢 32
|
