两轮移动机器人控制及机械系统设计(5kg负载)(含CAD图,SolidWorks三维图)(任务书,开题报告,论文说明书10000字,CAD图纸6张,SolidWorks三维图)
摘 要
两轮移动机器人作为一种本征不稳定轮式移动机器人,具有多变量、非线性、强耦合和参数不确定等特点,这使得它成为验证各种控制算法的理想平台。同时它运动灵活、结构简单,适于在狭小的空间工作,有着广泛的应用前景。两轮自平衡机器人能够完成多轮机器人无法完成的复杂运动及操作,特别适用于工作环境变化大、任务复杂的场合。开展两轮自平衡机器人的研究对于提高我国在该领域的科研水平、扩展机器人的应用背景等具有重要的理论及现实意义。
由于机器人的结构对于自平衡及运动控制具有重要的影响,因此本文研制了一种质量均布式两轮自平衡机器人,该机器人运动灵活、抗干扰能力强。通过分析两轮自平衡机器人的运动规律,采用PID控制算法设计了机器人PID控制器,实现了机器人的动态自平衡,提高了抗干扰能力,并通过实验验证了算法在自平衡、抗干扰和调整时间上的优势。
为了减少位姿估计误差的无限增长,提高机器人的定位精度,在分析两轮自平衡机器人感知系统用惯性传感器误差的产生机理以及误差的漂移特性的基础上,提出了两级分散式异构卡尔曼滤波算法,实现了机器人的组合导航,并补偿了低成本惯性传感器的误差,从而得到机器人位姿的最优估计,保证了波精度和实时性。
关键词:两轮移动机器人 非系统误差 卡尔曼 组合导航
ABSTRACT
As a kind of intrinsicly instable wheeled mobile robot, two-wheeled self-balanced robot (TSR) has multi-variable, non-linear, strong coupling and parameter uncertainty characteristics which make it to be an imagine platform to verify many kinds of control algorithms. TSR has flexible movement and simple structure, suitable for small space, so it has a broad prospect. TSR could perform complicate motion and manipulation tasks which the multi-wheeled robot could not do, and it is very adaptable to the great-change environment or complicated tasks. The research on the TSR system has the important theory and practical significance to heighten the research level and expand the application backgrounds.
Because robot’s structure has important effect on the self-balanced and motion control, an even-distributed molar and fixed centroidal TSR was proposed, which has flexible movement and strong anti-jamming. Those criterions make the TSR’s design rational and practical. Through kinematics analysis of TSR, The PID controller was designed by PID algorithm. The dynamic self-balanced is realized and the anti-jamming performance is increased. Simulation results verify that the algorithm has advantages in self-balancing, anti-jamming and adjusting time.
For decreasing error of position and attitude estimation from inertial sensors and improving positioning accuracy, error mechanism and drift characteristic were analyzed, this paper proposed two-graded decentralized isomeric Kalman Filter algorithm. It realizes integrated navigation of TSR, improves navigation’s performance, and compensates for the inertial sensor error. Thus, an optimal estimation for position and attitude is achieved. Experimental results demonstrate that the method is effective and feasible.
Key Words:two-wheeled self-balanced robot; unsystematic error; Kalman; integrated navigation; real-time motion identification
目录
摘 要 I
ABSTRACT II
第一章 绪论 1
1.1前言 1
1.2课题背景 3
1.3研究价值 4
1.4发展历史与研究现状 5
1.4.1两轮自平衡机器人国外研究情况 5
1.4.2两轮自平衡机器人国内研究情况 8
1.5本文主要研究内容 9
第二章 系统总体设计 11
2.1 两轮移动机器人(5kg负载)系统总体设计 11
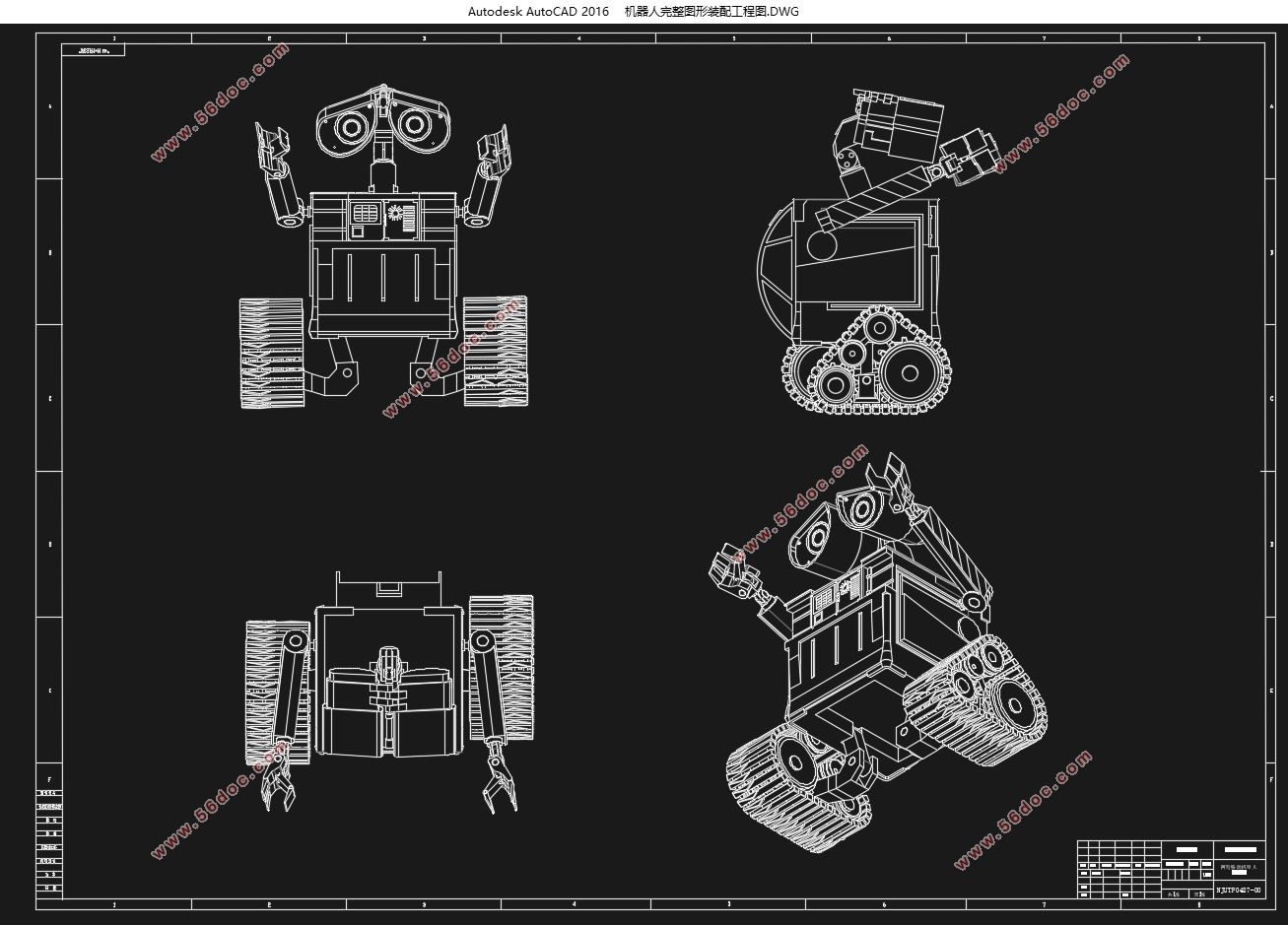
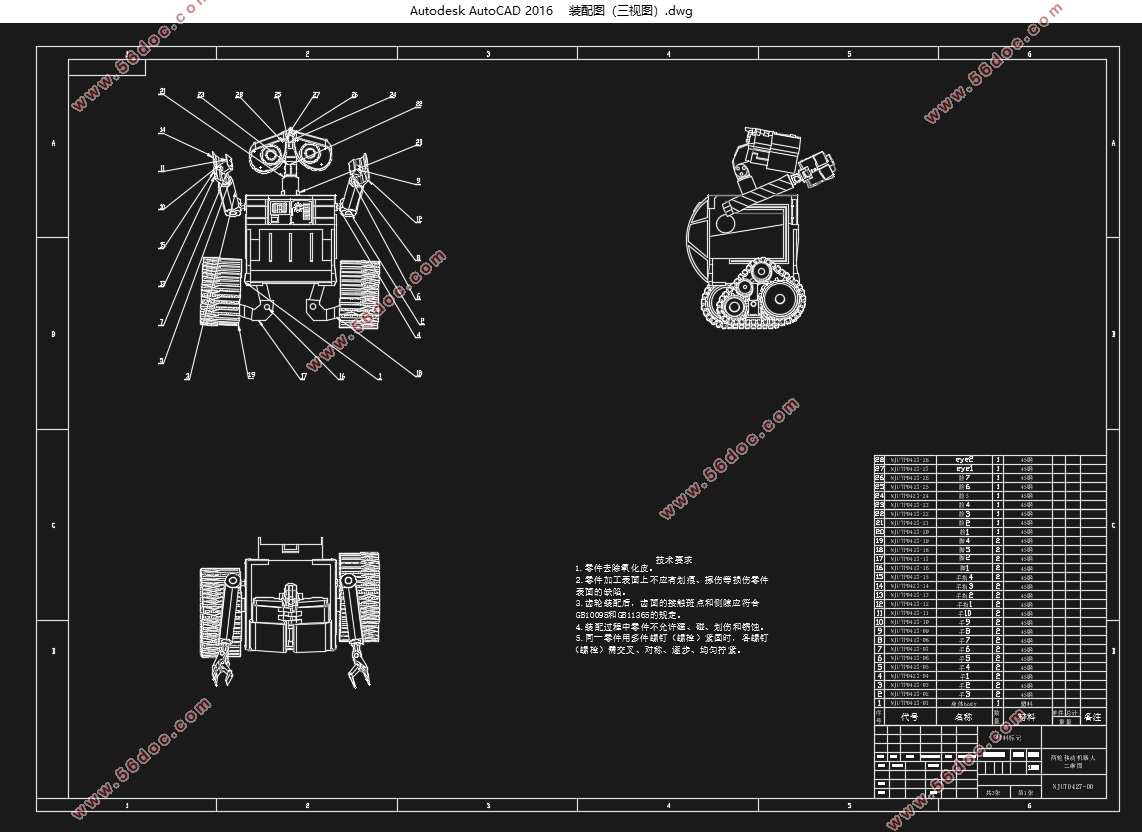
2.2机械系统设计 12
2.3控制系统设计 12
2.3.1控制器的选型 13
2.3.2驱动机构控制电路设计 14
2.3.3串口通讯电路设计 16
2.3.4传感器电路设计 17
2.4驱动系统的设计 22
2.4.1电机的选型 22
2.4.2 电机的转速控制 22
第三章 机器人的建模 25
3.1两轮移动机器人的建模 25
3.2使用牛顿力学的方法进行数学建模 25
3.3对车轮建立模型 25
3.4 对车身建立模型 27
3.5机器人模型 29
第四章 数据处理与实验 33
4.1引言 33
4.2.卡尔曼滤波理论 34
4.2.1滤波器的计算原型 35
4.2.2 滤波器的概率原型解释 37
4.2.3 离散卡尔曼滤波器算法 37
4.2.4 滤波器系数及调整 39
4.3 数据融合实验 40
第五章 小结 42
参考文献 43
致谢 47
|
