Design of Three - dimensional Knitting Robot for Carbon Fiber
Abstract
Composite materials have been widely used in different industries of life. In the last century it has been deeply used in the aerospace, military and other fields. How to quickly and efficiently stitch the composite parts is a great challenge to improve the application of carbon fiber materials. In this paper I decided to choose the design which can be equipped with industrial robots as a general equipment. This kind of equipment can stitch the three-dimensional complex carbon fiber material parts automatically.In this paper, I did these jobs:
(1)Analysisthe application status of carbon fiber materials around the world. The wide application of carbon fiber materials and the demand of 3D knitting for complex parts are clarified.
(2)The characteristics of bilateral knitting technology and unilateral knitting technology are analyzed. Then select the design of double needle unilateral suture technique to design the equipment.
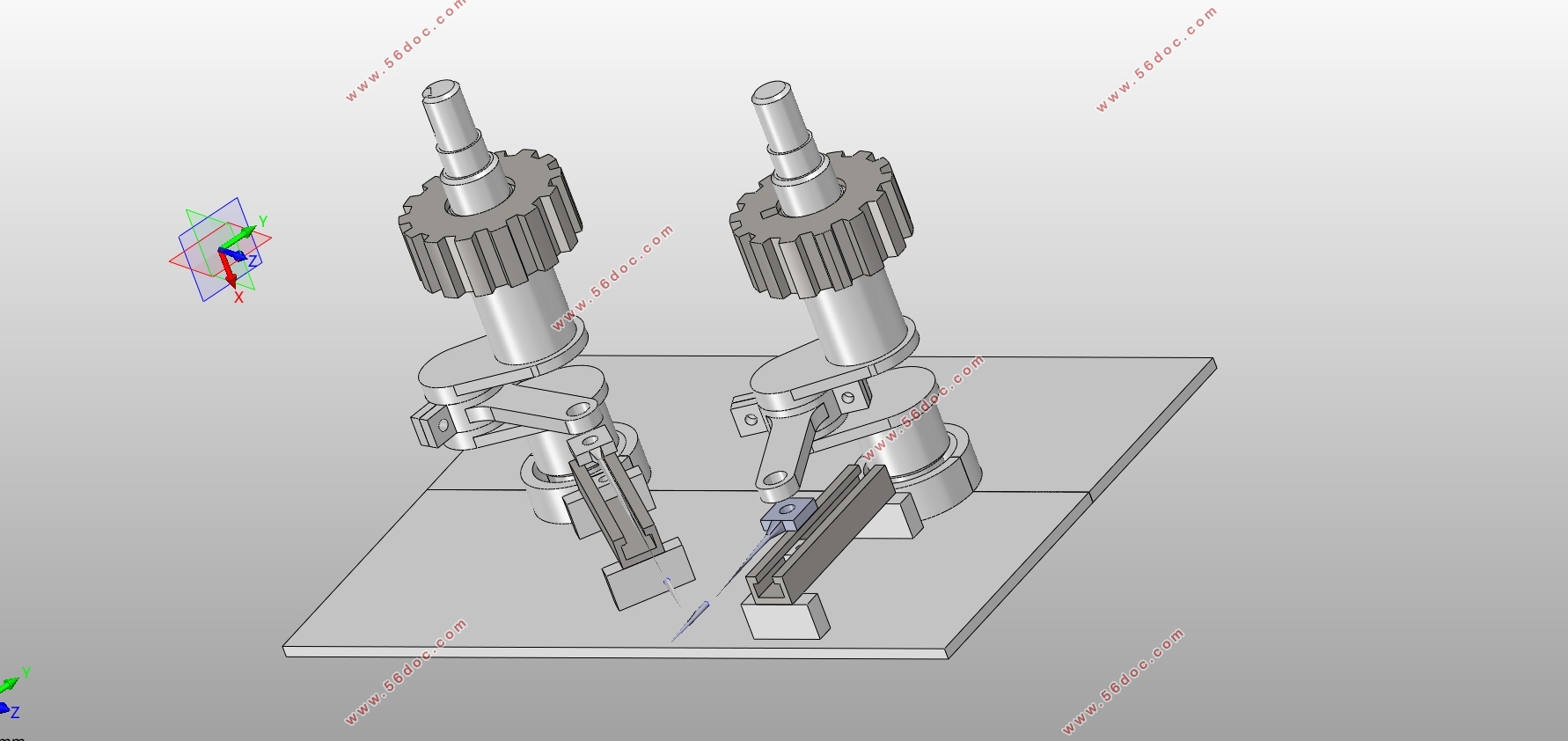
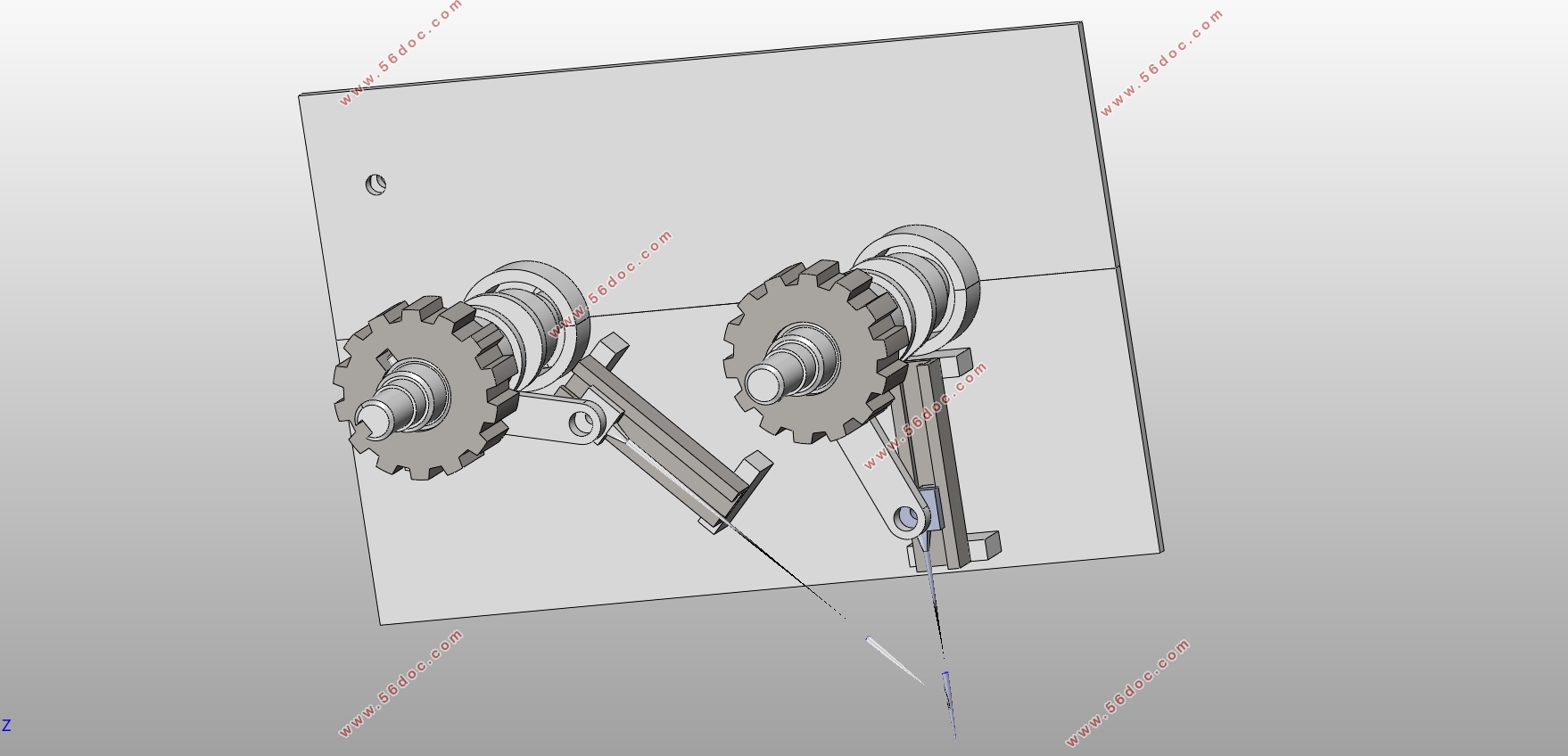
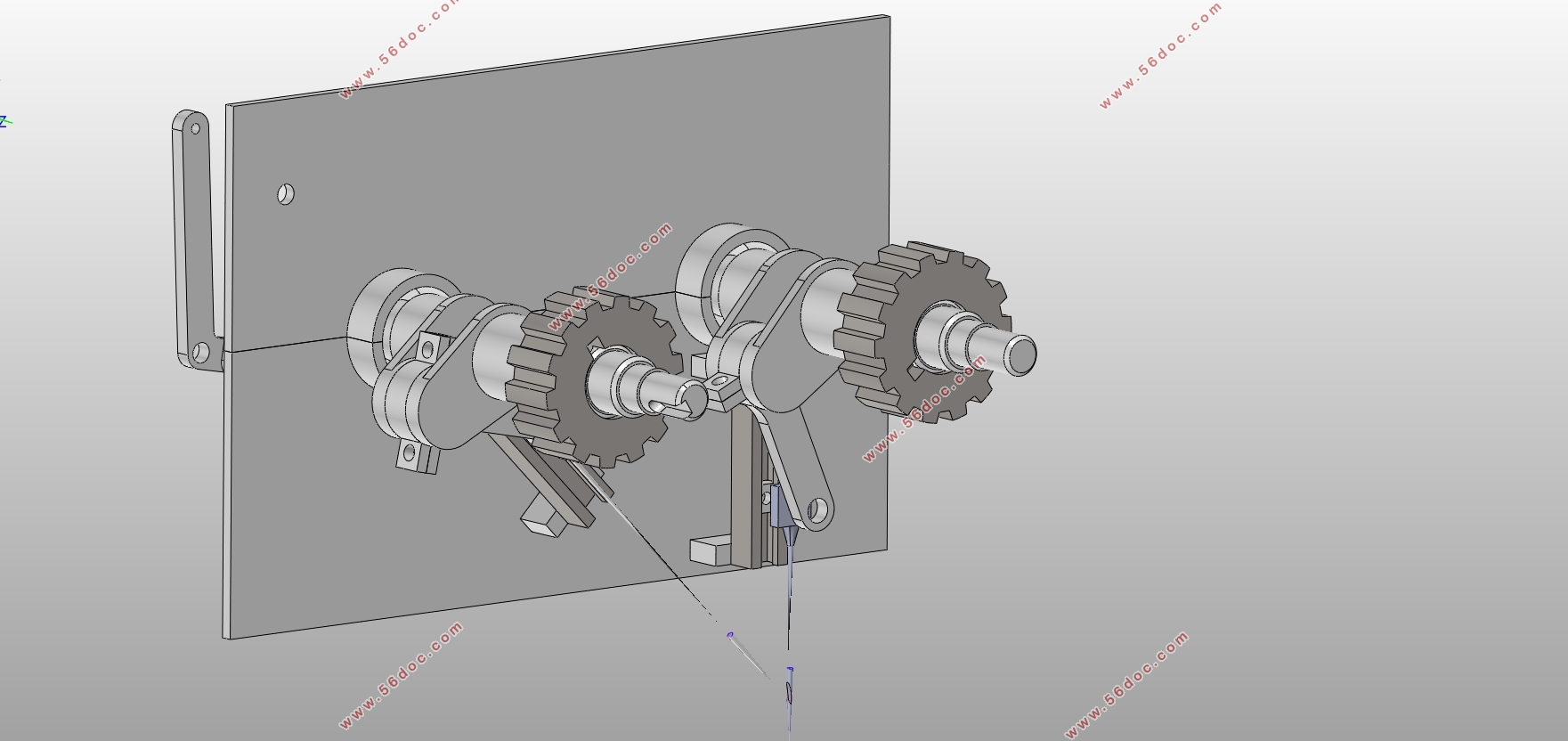
(3)I designed the structure of the stitching device, including the thread taking-up, leading and threading devices.I designed and check the specific size of the design. And I analysis the three institutions of movement. Then I built the model and simulated the motion in Solidworks.
(4)I introduced the industrial robot system, and chose the five-degree-of-freedom manipulator to carry the stitching machine. Set the angle of each joint. The drive system used the AC servo motor drive.
(5)I introduced the homogeneous coordinate transformation and the D-H parameter method. Then I used them to analysis the motion of the manipulator and to solve the positive problem and inverse problem in the process of manipulator movement.
Keyword:Carbon-Fiber;Three - dimensional Knitting; Robot; Oss