四足机器人机构及其控制系统的设计(含CAD装配图,SolidWorks三维图)(任务书,开题报告,外文翻译,论文说明书20000字,CAD图纸1张,SolidWorks三维图)
摘要
四足机器人在实际应用如运输、抢险及军事等活动中体现出了相比其他类型的机器人更加具有优势的实用性,而随着其应用范围的不断扩大,如何提高快速稳定的性能成为了当前四足机器人研究的热点,也对其控制系统的实时性、稳定性提出了越来越高的要求。
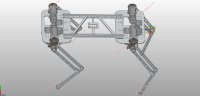
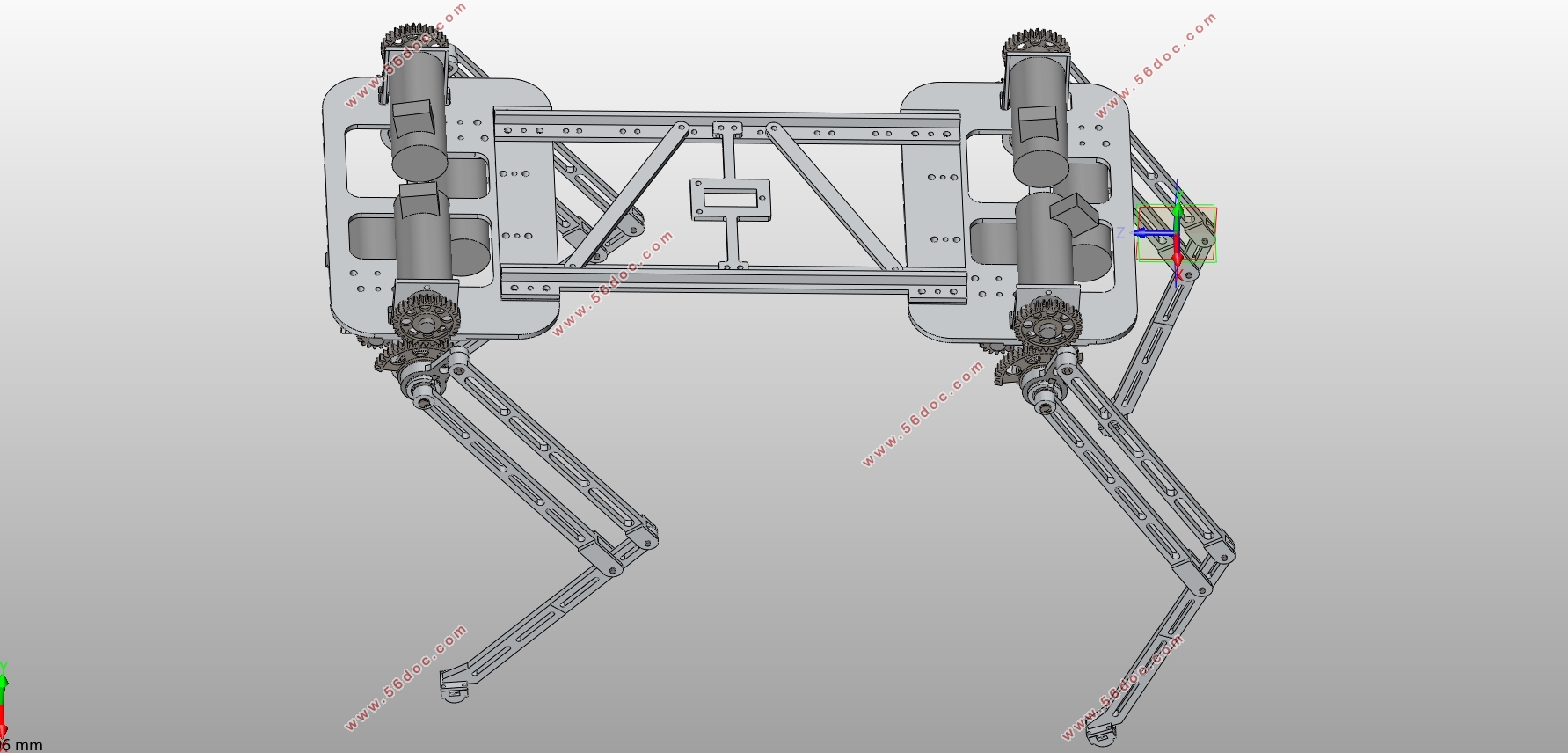
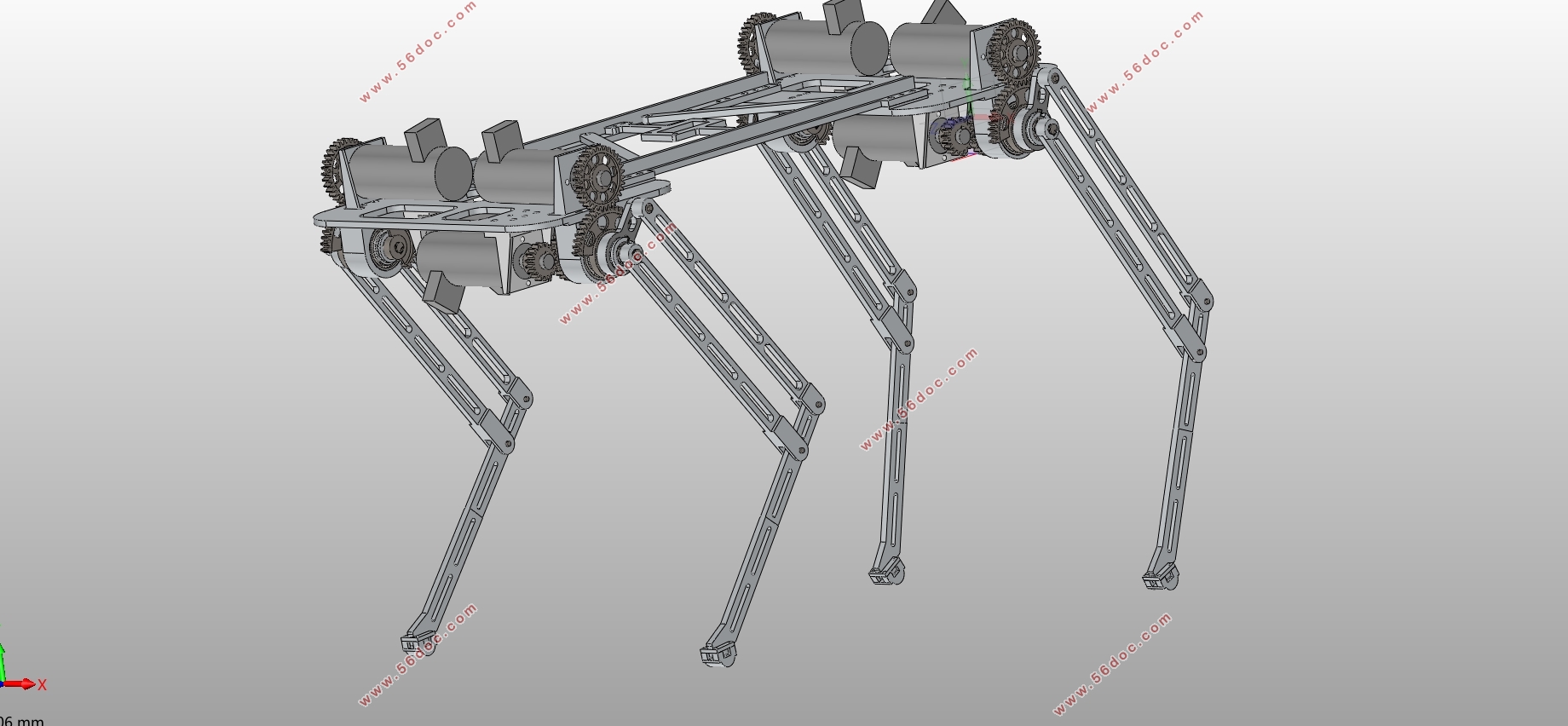
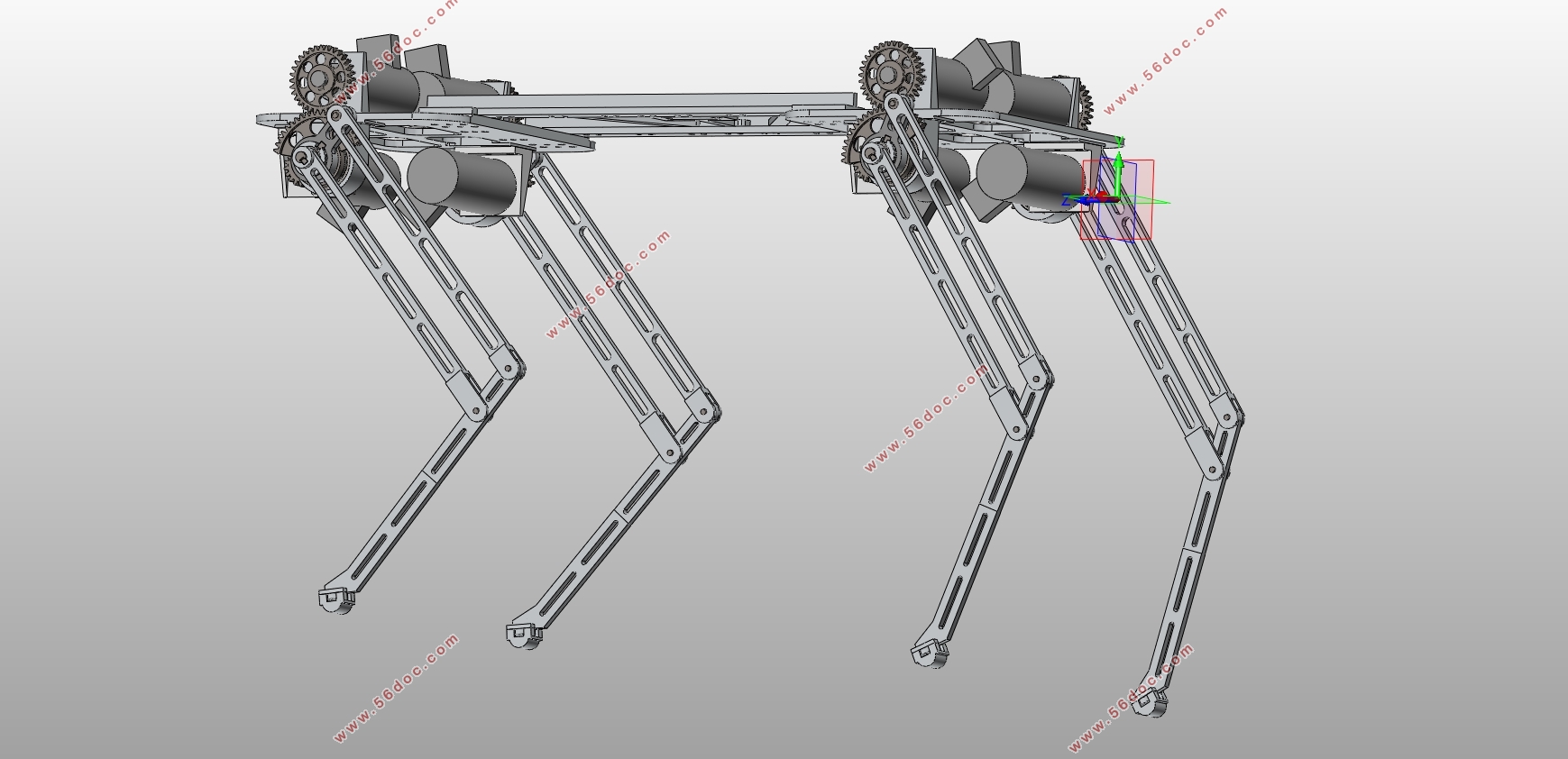
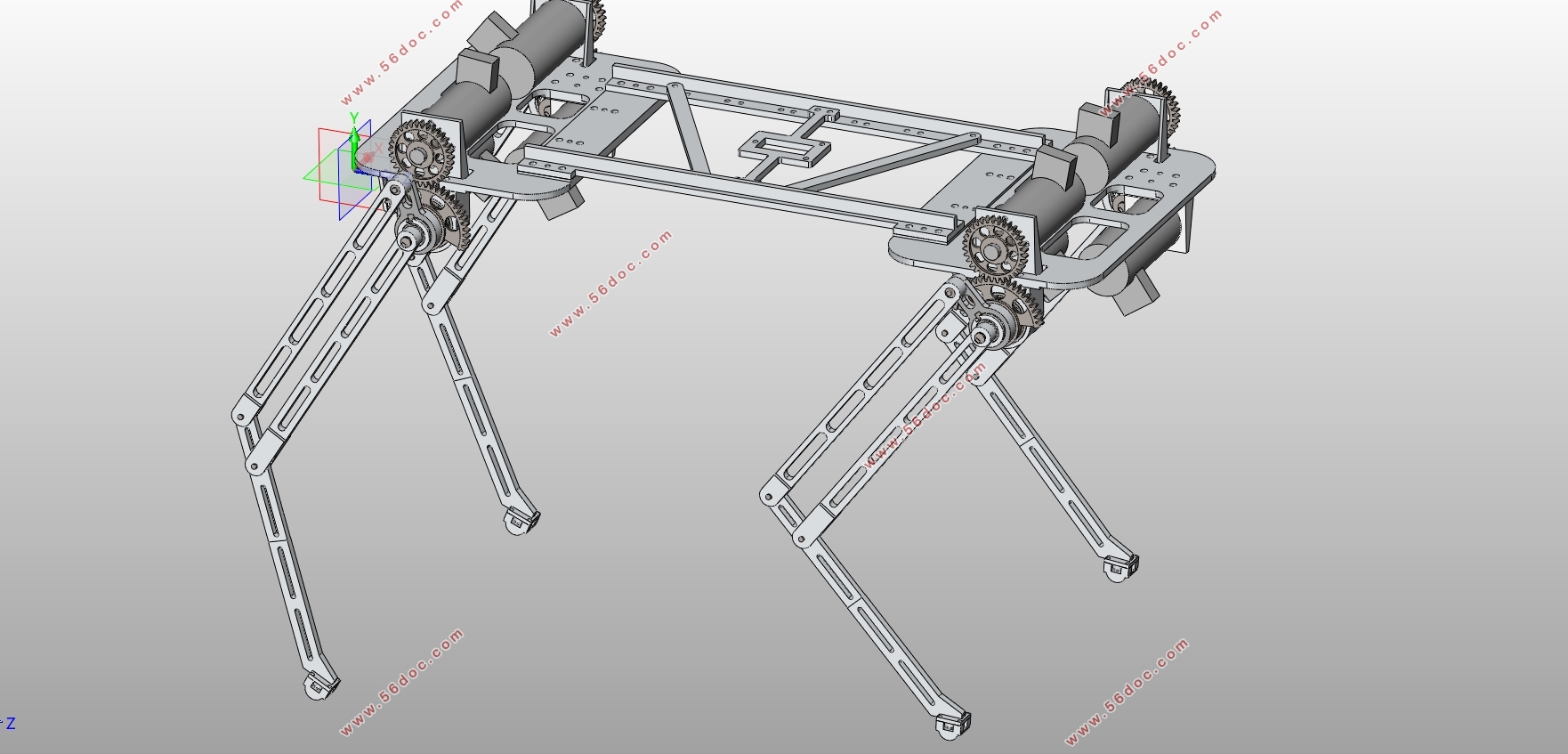
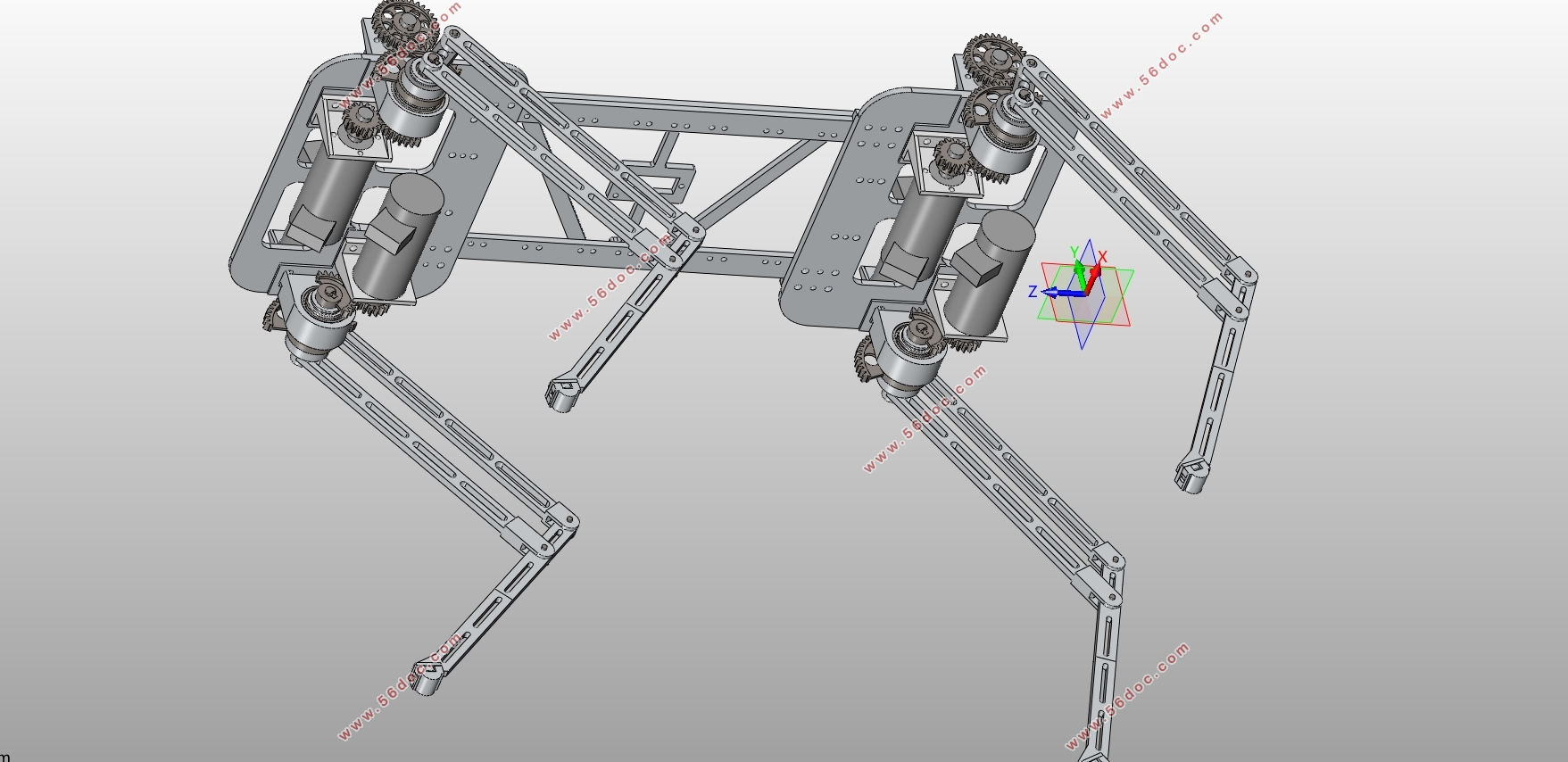
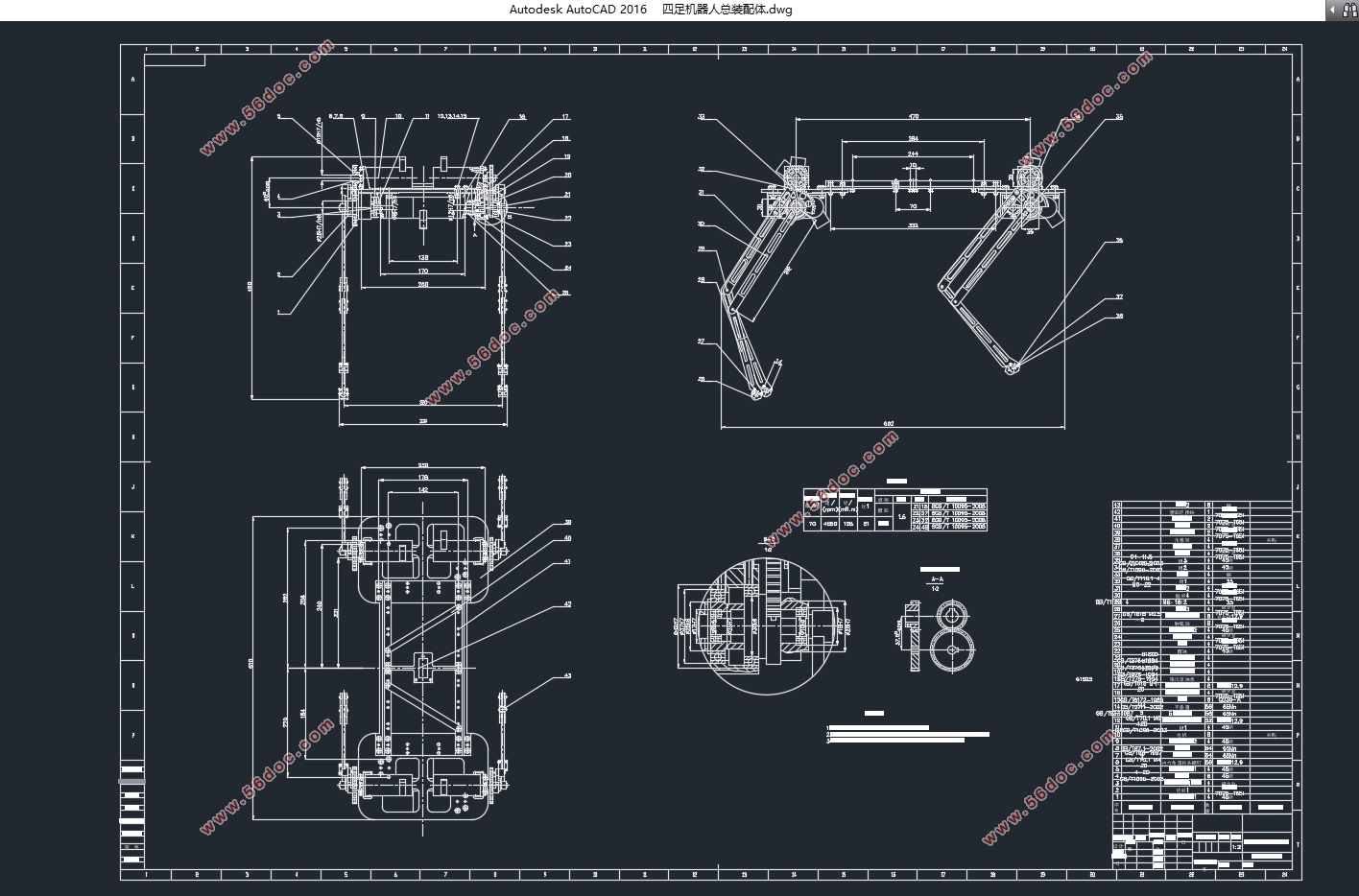
本文以四足机器人为研究对象,对四足机器人的基本结构与运动方式进行了研究,提出了一种能够满足其运动需求的机械结构模型,并在此基础上分析了四足机器人基于对角小跑的步态规划方案。根据结构方案与控制需求,进一步设计了基于CAN通信的控制系统总体框架。
在此控制系统的总体框架下,本文首先提出了硬件系统的设计,在现有硬件资源的基础上介绍了硬件选型与线路布置,接着完成了控制系统的软件设计,搭建了硬件设备之间的通信系统,完成了基于CAN总线通信的多线程程序设计与MFC交互界面的程序设计,使得通信系统能够达到数据传输的要求。
最后介绍了样机实验平台,完成了四足机器人在对角小跑步态下的位置控制。结果表明此次设计的四足机器人机械结构与控制系统能够满足其运动控制的需求。
关键词:四足机器人;机械结构;对角小跑步态;CAN通信
Abstract
Quadruped robot has more advantages than other types of robots in practical applications such as transportation, emergency rescue and military activities. With the continuous expansion of its application scope, how to improve the rapid and stable performance has become a hot topic in the research of quadruped robot, the necessary conditions for the development of quadruped robot put forward higher and higher requirements for the real-time and stability of its control system.
In this thesis, the basic structure and movement mode ofquadruped robot is studied, and a mechanical structure model that can meet its movement demand is proposed, and on this basis, the gait planning scheme of quadruped robot based on trot is analyzed.According to the structure scheme and control requirements, the overall framework of the control system based on CAN communication is designed.
Under the overall framework of the control system, this paper puts forward the design of the hardware system, on the basis of the existing hardware resource introduces the selection of the hardware and circuit arrangement, then completes the software design of the control system, set up the communication between the hardware system, completed the multithreaded programming with MFC based on CAN bus communication interface programming, make communication system CAN meet the requirements of data transmission.
Finally, a prototype experimental platform is introduced, and the position control of the quadruped robot in the trot gait is completed.The results show that the mechanical structure and control communication system of the designed quadruped robot can meet the requirements of its motion control.
Key Words:Quadrupedrobot;Mechanical structure;Trot;CAN communication
目录
第1章绪论 1
1.1 研究背景与意义 1
1.2 国内外研究现状 1
1.2.1 国外研究现状 1
1.2.2 国内研究现状 3
1.3 本文主要研究内容 3
第2章四足机器人机械结构设计与步态规划 4
2.1 引言 4
2.2 犬类生理结构分析 4
2.3 四足机器人结构模型分析 4
2.4 四足机器人机械结构设计原则 5
2.5 四足机器人机械结构设计 7
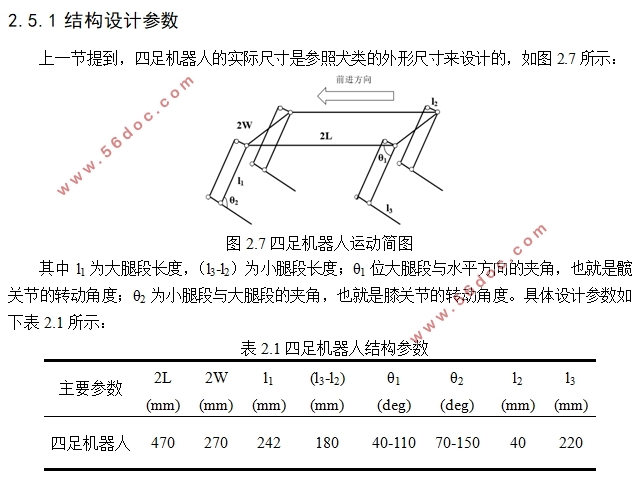
2.5.1 结构设计参数 7
2.5.2 四足机器人整机设计 7
2.5.3 单腿髋部及其支撑板结构设计 8
2.5.4 腰部结构设计 13
2.6 四足机器人步态规划 13
2.6.1 四足机器人基本步态分析 14
2.6.2 四足机器人运动学分析 15
2.6.3 四足机器人足端轨迹规划 17
2.6.4 仿真分析 17
2.7 本章小结 18
第3章四足机器人控制系统硬件设计 19
3.1 引言 19
3.2 硬件系统设计 19
3.2.1 硬件系统设计总体框架 19
3.2.2 主控制器硬件设计 20
3.2.3 从控层与执行层硬件设计 23
3.3 本章小结 24
第4章四足机器人控制系统软件设计 25
4.1 引言 25
4.2 基于CAN总线通信的控制电机任务需求 25
4.3 软件系统设计 26
4.3.1 软件系统设计总体框架 26
4.3.2 基于CAN总线通信的多线程程序设计 27
4.3.3 MFC交互界面与程序设计 32
4.4 本章小结 38
第5章四足机器人样机平台实验 39
5.1 引言 39
5.2 样机平台介绍 39
5.3 实验验证 39
5.4 本章小结 40
第6章总结与展望 41
6.1 工作总结 41
6.2 研究展望 41
参考文献 42
致谢 43
|