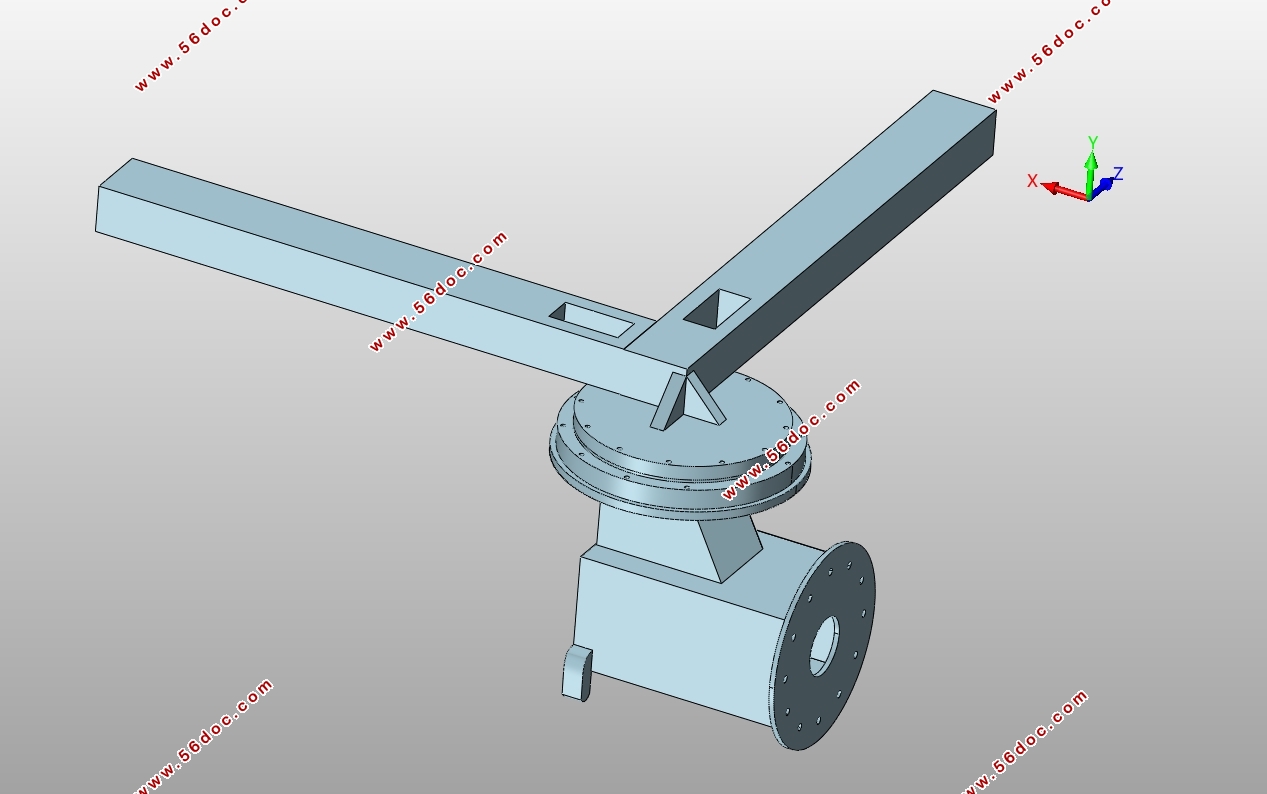
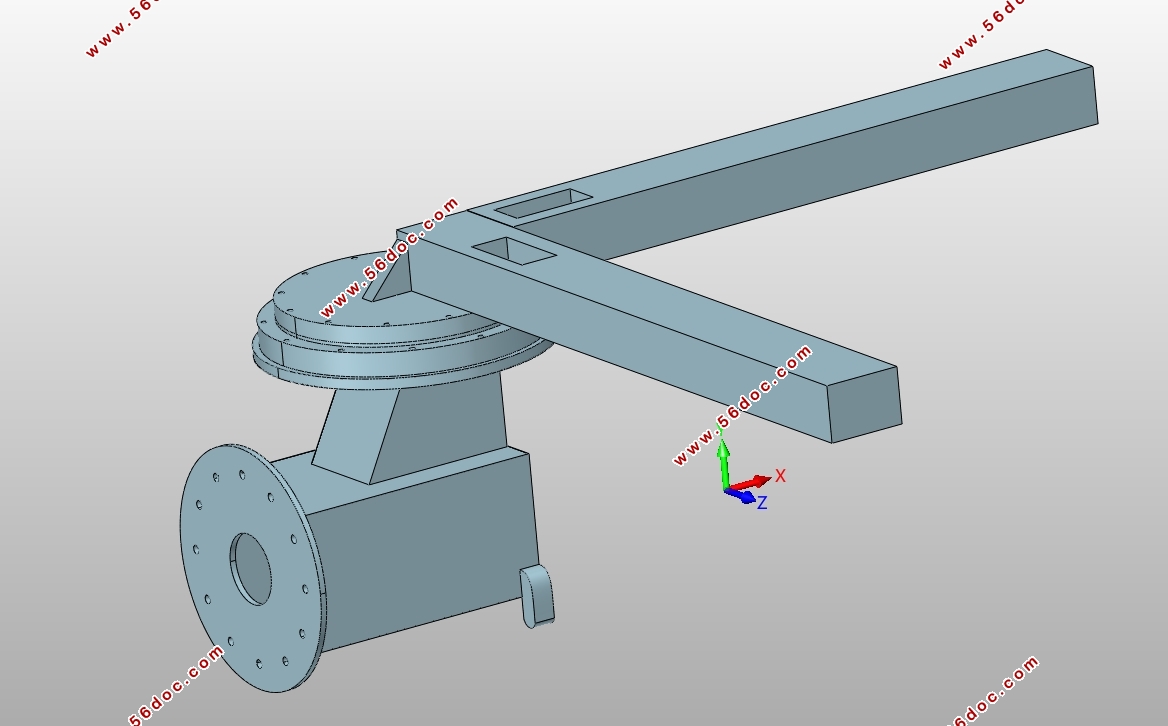
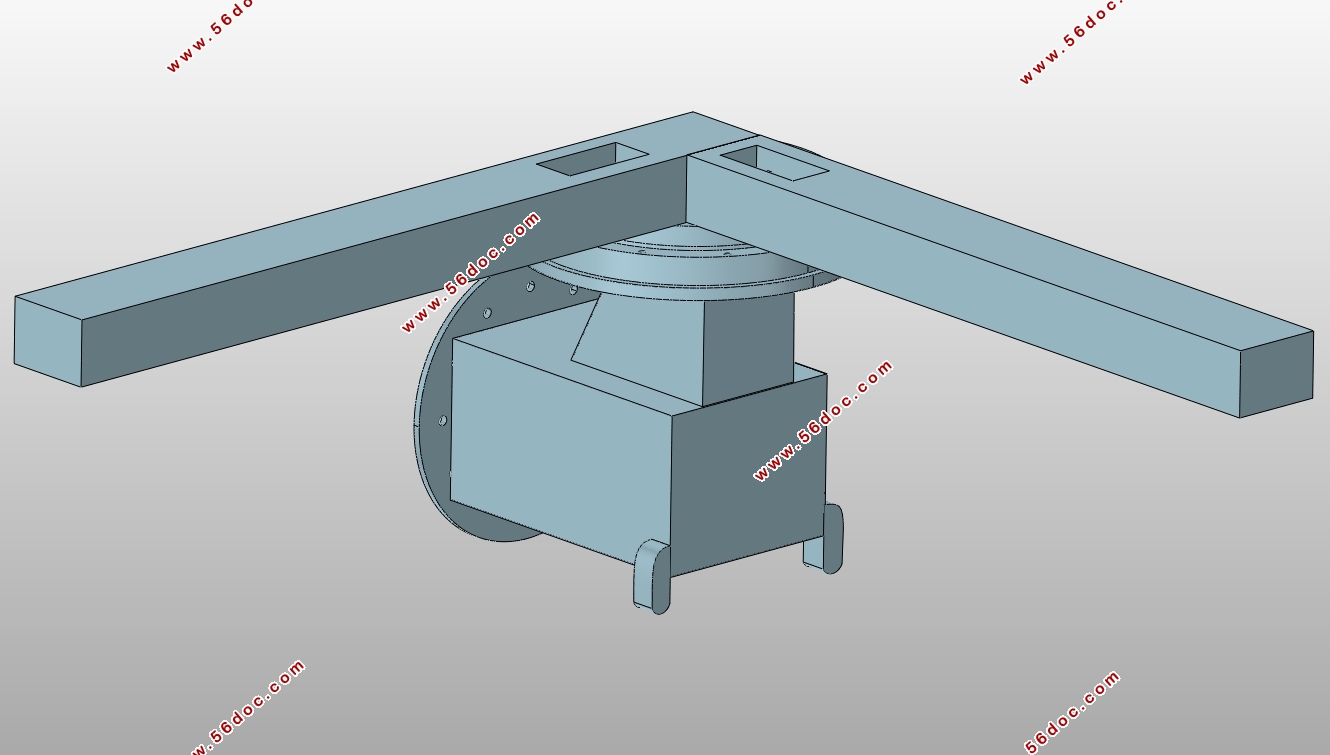
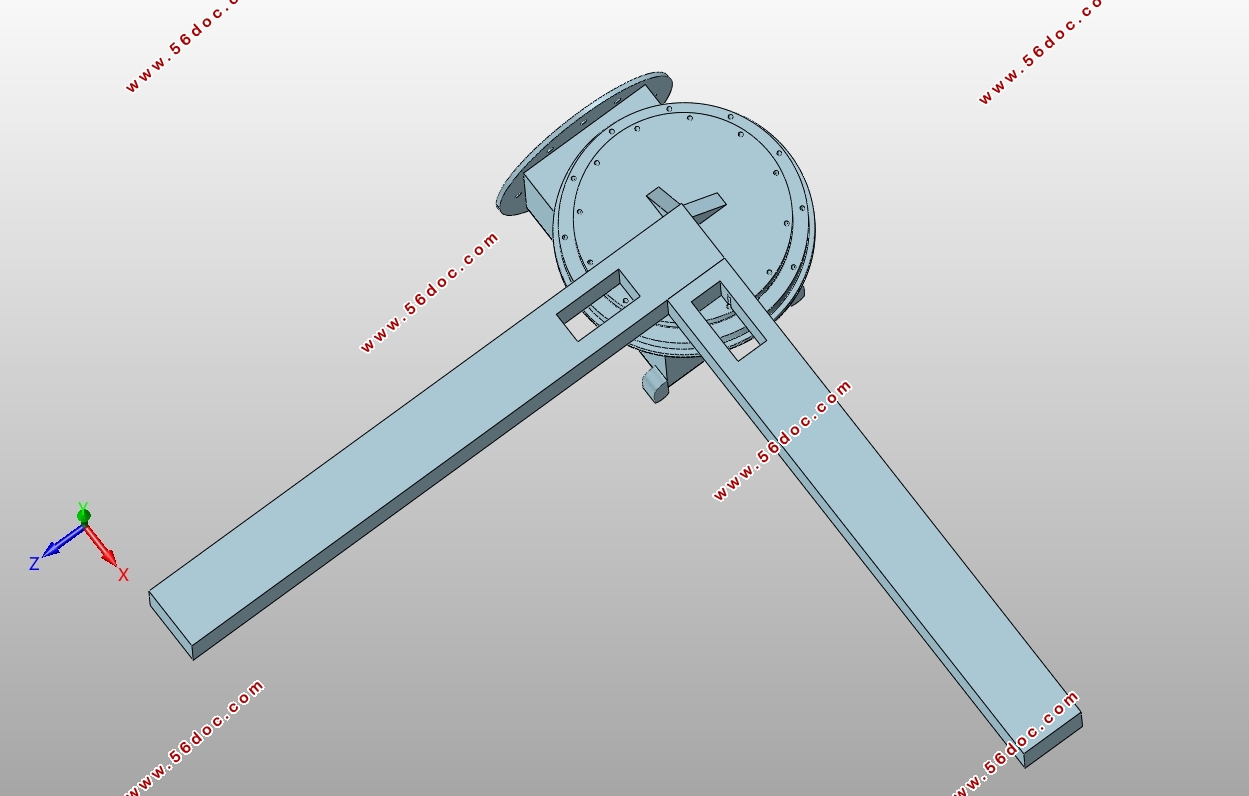
CWGS200аЭВСДАЛњбђНЧБлНсЙЙШ§ЮЌЩшМЦ(КЌPROEШ§ЮЌЭМ)
РДдДЃК56doc.com зЪСЯБрКХЃК5D28021 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D28021
зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
CWGS200аЭВСДАЛњбђНЧБлНсЙЙШ§ЮЌЩшМЦ(КЌPROEШ§ЮЌЭМ)(ШЮЮёЪщ,ПЊЬтБЈИц,ТлЮФЫЕУїЪщ9000зж,PROEШ§ЮЌЭМ)
еЊвЊ
ЫцзХЩчЛсОМУбИУЭЗЂеЙЃЌГЧЪаЙцФЃЛЏЃЌИпТЅДѓЯУШчДКЫёДЃСЂЦ№РДЃЌВСДАЛњгЩДЫЕЎЩњЁЃЯжДњВСДАЛњжжРрЗБЖрЃЌВСДАЛњЕФБлЭЗзАжУжжРрвВВуГіВЛЧюЃЌЫљвдФПЧАВСДАЛњашвЊИќПьНнЗНБуЃЌПЩППадКЭАВШЋадИќКУЕФбђНЧБлЭЗЁЃбђНЧБлЭЗПЩвдЪЙВСДАЛњЕФФмЖЏадФмИќКУЃЌЖјЧвБугкВйзїЁЃ
БОПЮЬтжївЊбаОПВСДАЛњбђНЧБлНсЙЙЕФШ§ЮЌЩшМЦЃЌжївЊАќРЈвдЯТМИИіФкШнЃК
1.НщЩмСЫбђНЧБлЗЂеЙЧїЪЦКЭЯжзДЁЃ
2.ШЗЖЈбђНЧБлНсЙЙЗНАИЁЃ
3.ЖдЛизЊжЇГаМАЦфЧ§ЖЏЕчЛњВПЗжНјаабЁаЭМЦЫуЁЃ
4.бЁЖЈЛизЊжЇГаЕФТнЫЈВЂНјаааЃКЫЁЃ
5.ЖдбђНЧБлБлЭЗНјааЪмСІЗжЮіЃЌНјааЧПЖШаЃКЫМЦЫуЁЃ
6.гУPROEШэМўЖдбђНЧБлНсЙЙЭъГЩШ§ЮЌзАХфЁЃ
ЙиМќДЪЃКЛизЊжЇГа бђНЧБл аЃКЫМЦЫу Ш§ЮЌНЈФЃ
The 3D design of Knuckle arm structure of CWGS type 200 window cleaning machine
Abstract
With the rapid development of social economy, city scale, many-storied buildings such as bamboo shoots stands up, the windows cleaner was born. There are many kinds of modern window cleaners, and the arm head of the window wiper device is endless, so the windows cleaners need to be more convenient, reliability and safety. This requires that the dynamic performance of the window cleaning machine is better and easy to operate.
This paper mainly studies the 3D design of Knuckle arm structure of window cleaning machine, the main contents are as follows:
1.Introduced the development trendency and current situation of Knuckle arm windows cleaner in the article.
2.Analysis of the claw arm structure and three-dimensional modeling by PROE software.
3.Including the design and analysis of the Knuckle arm seat structure,and the selection on the slewing bearing part.
4.Select the bolt of the rotary bearing and check it.
5.The force analysis of boxer arm and the actual situation, combined the lifting force with the working mode which is considering that impose a oblique direction.then check the final calculation.
6.Selected knuckle arm parameters and motor reducer type, and calculate the gear and the rotary bearing.
7.The brief introduction of the 3D modeling part and the steps of assembly.
KeywordsЃКSlewing bearing;Straight arm;Checking calculation;Three-D modeling
ФП ТМ
еЊвЊ I
Abstract II
ЕквЛеТ аїТл 1
1.1ВСДАЛњНщЩмМАЗЂеЙЧїЪЦ 1
1.2бђНЧБлНсЙЙЖЈвх 1
1.3бђНЧБлНсЙЙЗжЮігыБШНЯ 2
1.4бђНЧБлЙІФмНщЩм 2
ЕкЖўеТ бђНЧБлШ§ЮЌНсЙЙЗНАИ 4
2.1жївЊММЪѕВЮЪ§ 4
2.2бђНЧБлНсЙЙЕѕБлЩшМЦЗНАИ 5
2.3ЕззљЕФЩшМЦЗНАИ 7
2.4МѕЫйЛњГнТжМАЛизЊжЇГХЕФЩшМЦЗНАИ 8
2.5ЛизЊЛњЙЙТнЫЈЕФЩшМЦЗНАИ 10
2.6ЯоЮЛПЊЙиЕФбЁаЭЩшМЦ 10
ЕкШ§еТ бђНЧБлНсЙЙМЦЫу 15
3.1ЕчЖЏЛњЕФбЁаЭ 15
3.1.1бЁдёЕчЖЏЛњЕФРраЭ 15
3.1.2бЁдёЕчЖЏЛњЕФШнСП 15
3.1.3ШЗЖЈЕчЖЏЛњЕФзЊЫй 16
3.2ЦННЧБлгІСІМЦЫугыаЃКЫ 17
3.3ЛизЊжЇГаЗжЮіМЦЫуМАаЃКЫ 19
3.3.1ГнТжЗжЮіМЦЫу 20
3.3.2ГнТжаЃКЫ 24
3.3.3ЛизЊжЇГаМЦЫу 29
3.4ЛизЊжЇГаТнЫЈМЦЫуаЃКЫ................................................................................33
ЕкЫФ еТ PROEШ§ЮЌНЈФЃ
4.1бђНЧБлНЈФЃВНжш............................................................................................35
4.2бђНЧБлзАХф....................................................................................................40
ВЮПМЮФЯз 40
|