自行走轮椅的设计(机械设计制造及其自动化)

摘要:为实现高性能和低成本的自行走轮椅, 开发了全数字自行走轮椅控制器; 采用先进的无速度传感器测速技术, 设计了带电流补偿的电压负反馈加负载不平衡补偿的双电机协调控制方案。驱动部分采用有刷幅条电机的后轮驱动。幅条电机传动具有转矩大、噪音低、效率高、耗电少、寿命长、绿色环保等优点,克服了链传动噪声大、冲击大、传动不平稳等缺点,且外观新颖,控制部分采用采用平等四边形连杆机构,结构简单,并实现了大角度的转向控制和两轮同步运动,同时增加轮椅在行进中的稳定性,而且起到防倒的功能,遇上下坡也能自主掌控,安全性高;制动部分采用特制的涨刹机构,达到前后手柄都可以制动,安全性高。 关键词: 自行走轮椅; 控制器; 双电机; 协调控制; S曲线; 误差检测;幅条电机;连杆机构;涨刹机构;电动控制;辅助装置 Automatic walk a wheelchair Signature of Supervisor: 本文以自行走轮椅运动控制为背景,依据系统控制方案编制了相应的控制软件, 软件模块化并考虑了参数修改和运行状态显示等功能。经调试和试运行, 技术指标达到了预期要求。从考虑人的舒适性和可靠性出发, 提出了基于电压检测的功率管故障及主电路故障判断、定位的实施方案, 并给出了速度给定S曲线计算公式和软件编程算法。运行效果良好。操纵杆是轮椅运动速度方向和大小的给定装置。  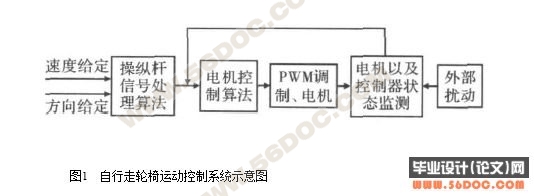  目 录 9000字 1 绪论 ............................................................................................................................ 2 1.1 国内外发展情况 ............................................................................................................. 4 1.2 设计内容 ........................................................................................................................5 1.3 设计思路 ........................................................................................................................5 2 系统方案 .......................................................................................................................7 2.1 机械系统方案 ....................................................................................................................7 2.2 控制方案 ........................................................................................................................9 2.3 总体方案 .......................................................................................................................10 3 机械结构计 .................................................................................................................11 3.1 链条的传动设计 ............................................................................................................11 3.2 电动机的选用 ..............................................................................................................11 3.3 驱动电路设计 ................................................................................................................12 4 控制系统设计 ...............................................................................................................13 4.1 控制系统软件设计 ...........................................................................................................14 5 总 结 14 5.1 设计总结 14 5.2 展望 14 参考文献 15 附录 .18 致谢 ..................................................................................................................................... 19 |