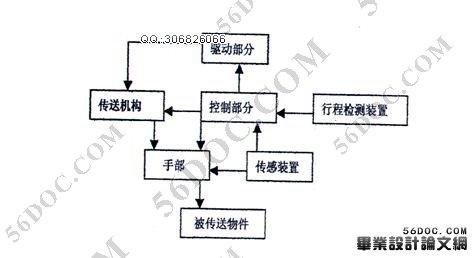
系统组成
本基械手系统由机体,传送机构,动力源和控制装置四部分组成。其中机体由小车及本体等部分组成;传送机构主要由伸缩臂及抓紧机构所组成;动力源由液压驱动和机械驱动两种形式构成控制装置主要由自动控制和手动控制两部分组成。
总体技术方案及系统组成
原始数据
负载重量:10kg
重复定位精度:±1mm
自由度:3(Z的移动,R轴的平动,θ轴的转动)
Z:大臂的升降
R:大臂的伸缩
θ:腰轴
各轴最大运动速度:
Z轴上下:200mm/s
θ轴回转:30°/s
R轴伸缩:200mm/s
各轴最大运动范围:
Z轴上下:550mm
θ轴回转:90°
R轴伸缩:400mm
工作要求:
机械手的工艺流程:
机械手原位→机械手前伸→机械手上升→机械手抓取并夹紧→机械手后退→机械手前进(小车)→小车停止→机械手左转90°→机械手前伸→机械手松开→机械手后退(小车)→机械手下降→机械手右转90°→小车后退→退至原位
参考文献
1、杨黎明.机械零件设计手册.第一版.国防工业出版社,1986,12
2、吴宗泽.机械设计. 第一版.中央广播电视大学出版社,1998,2
3、卢颂峰.机械设计课程设计手册. 第一版.中央广播电视大学出版社,1998,4
4、非标准零件手册.第三版.国防工业出版社
5、液压与气动传动.机械工业出版社
6、机械手及其应用.机械工业出版社
7、液压元件样本.机械工业出版社
8、杨长能, 张兴毅.可编程序控制器基础及应用. 第一版.重庆大学出版社,1992,1
9、左建民.液压与气压传动.第二版.北京:机械工业出版社,1999,5
10、孙燕华.AutoCAD2000机械制图.北京:机械工业出版社,2002,9
11、顾京.数控加工编程及操作.北京:高等教育出版社,2003,9
12、陈立德.机械设计基础课程设计指导书.第二版.北京:高等教育出版社,2004,6
13、金大鹰.机械制图.北京:机械工业出版社,2001,7
14、柴鹏飞.机械设计基础.北京:机械工业出版社,2004,8
15000字
|