康复医疗机器人设计(CAXA二维图+PROE三维造型)(精品)☆
来源:56doc.com 资料编号:5D3884 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D3884
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
摘要
本文研究的是一种用于辅助脑卒中和脊椎损伤患者恢复下肢步行能力的康复医疗机器人。传统的康复医疗方式局限于理疗师个人的经验和能力,而这种机器人是把下肢外骨骼技术运用于康复训练之中,可以将理疗师从繁重的训练任务中解放出来,还可以客观记录训练过程中患者的训练数据,供理疗师分析评价治疗效果;机器人所记录下的详细数据,还可以使理疗师能够深入了解中枢神经康复的规律。
本文首先对人体下肢肌肉骨骼运动机理以及脑卒中和脊椎损伤患者下肢康复方法进行研究,明确了采用机器人的康复目标,并为拟人化的机械结构设计打下基础。然后通过拉格朗日动力学方程建立人体步行的动力学模型,利用Matlab对动力学模型进行了计算,为控制策略的制了准备,并且为后续ADAMS的仿真分析打下理论基础。
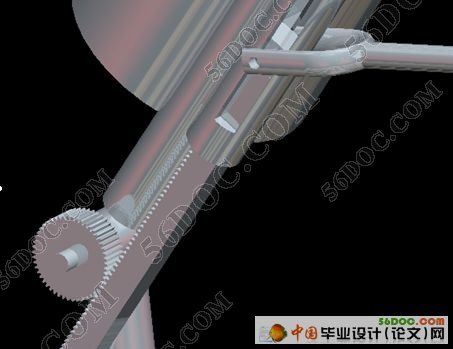
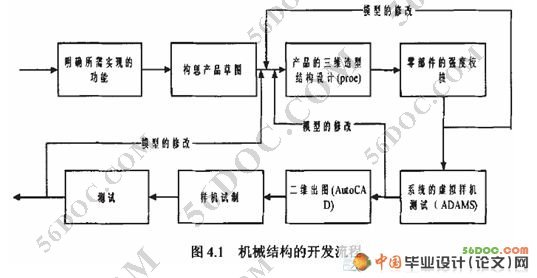
接着按照人机工程学和拟人化的原则,采用电机驱动的方式,设计出机器人的机械结构。并基于三维参数化软件Pro/E建立外骨骼下肢康复机器人的实体模型,在动力学仿真ADAMS中进行仿真。
在上述研究的基础上开发出一套下肢外骨骼康复机器人的原型实验系统,包括机械结构的加工和组装、以及控制系统的具体实现。通过实验研究,该系统能够很好的完成对患者下肢的被动训练任务,为今后开展进一步深入研究打下基础。
关键词: 外骨骼,下肢康复训练,机器人,电机驱动,拉格朗日动力学方程,动力学仿真
Abstract
ABSTRACT
In this research ,we focused on developing a rehabilitation robot for rehabilitation of locomotion in stroke and spinal cord-injured(SCI) individuals.In the traditional way of training,the leg movement of the patient has to be assisted by the physiotherapist.The physical capability and the individual experience of the therapist usually limits this type of training.In this paper ,we combined the exoskeleton technology and the rehabilitation training to develop a robot for helping the physiotherapists disengage from the heavy training work.This robot also call automatically record the training data ,which call be used to analyze and evaluate the therapeutic effect in training process by physiotherapists.
This paper firstly introduced the mechanism of human lower extremity musculoskeletal movement and the rehabilitation training methods of the stroke and SCI patients for design of mechanical structure of the robot.
Based on the Lagrange kinetic equation we built a dynamic model of Bipedal Walking for developing the control strategies of the robot.Then we designed the mechanical structure of the robot and used the three—dimensional parameter software Pro/E to set up the model of the robot.Finally with the interface between Pro/E and
ADAMS software.we inputted the robotics prototype into ADAMS to do dynamic simulation.
In addition,a control strategy of the robot Was explored ,and the prototype of the experimental system was developed to verify our theoretical outcomes and
further experiments will be performed on it.
Key words:Exoskeleton,Lower limb rehabilitation training,Robot,Motor Driver ,Lagrange kinetic equation,Dynamic Simulation
本文研究内容
具体来说,本文所涉及到的研究内容主要从以下几个方面分别展开:
首先,对人体下肢康复机理及脑卒中和脊椎损伤患者康复方法进行研究。基于人机一体化的思想,设计出适用于患者下肢康复的外骨骼机器人,其中一个重要的原则就是要尽可能模拟理疗师正确的康复训练的动作以达到最佳的康复目的。所以在进行康复机器人设计之前要对患者下肢运动机理,康复方法进行研究。
其次,建立人体步行的动力学模型。为外骨骼康复机器人的控制策略的研究提供基础,并为结构设计之后的整个机械系统的动力学仿真提供理论基础。
再次,外骨骼机器人的杌械结构设计。由于机械结构的设计是整个外骨骼系统开发过程中的第一步,也是极其重要的一步,因为结构设计的好坏将直接影响到整个系统最终功能的实现程度。因此,在结构设计过程中,包括关节机构的设计和驱动器选择布置设计等工作,都要考虑理疗师康复训练的动作,最大可能地模拟患者真实下肢功能,从而才能最大程度地利用机器人来实现对患者的康复训练的目的。
最后,外骨骼的原型系统实现。包括机械结构的加工和组装、人机协调控制方式的初步实现,为进一步的实验研究创造了条件,并积累相关经验,为产品的产业化创造良好的条件。
目 录 35000字
摘要 4
Abstract II
第1章 绪论 1
1.1 课题背景 1
1.2 国内外研究进展 3
1.2.1国内外康复机器人的研究现状 3
1.2.2国内外下肢外骨骼的研究现状 6
1.3下肢外骨骼康复机器人技术难点分析 9
1.4本文研究内容 10
第2章 瘫痪患者下肢运动及康复研究 11
2.1 引言 11
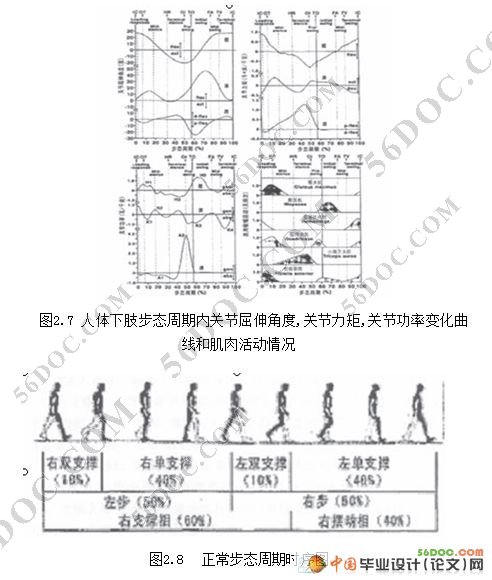
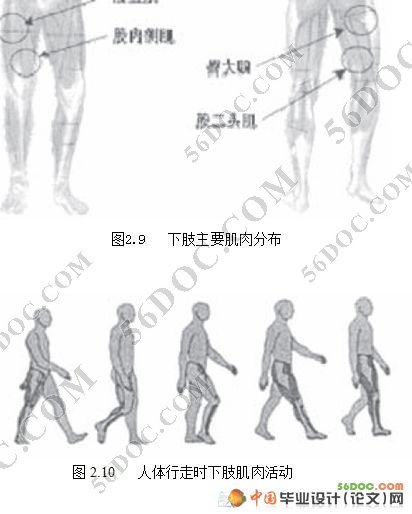
2.2 脑卒中瘫痪患者下肢运动机理的研究 11
2.2.1 下肢解剖学 12
2.3脑卒中及脊椎损伤患者的下肢康复方法 19
2.3.1脑卒中的康复评定及治疗方法 19
2.3.2脊椎损伤的康复评定及治疗方法 21
第3章 人体步行的动力学模型的建立 22
3.1引言 22
3.2动力学模型建立的理论基础 22
3.2.1动力学分析方法及其比较 22
3.2.2分析力学基础及拉格朗日方程 23
3.3人体步行动力学模型的建立 25
3.4人体步行动力学模型的仿真 33
3.4.1相关人体参数的确定 33
3.4.2模型输入参数的确定 33
3.4.3模型的输出力矩 36
第四章 下肢康复机器人机械结构设计 37
4.1引言 37
4.2总体设计要点 37
4.2.1关节设计和自由度分配 40
4.2.2身材兼容性的考虑 40
4.3驱动部分设计 43
4.3.1驱动器的定位 43
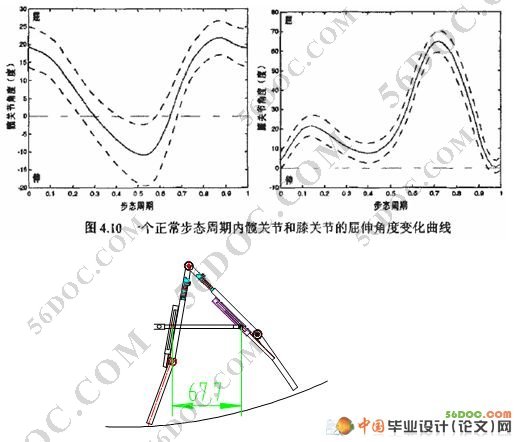
4.3.2驱动器的行程的确定 45
4.3.3驱动器驱动方式的选择和实现 46
4.3.4电机选择及计算 46
4.4 其他零部件设计 47
4.4.1 齿轮设计 47
4.4.2 蜗轮蜗杆 49
4.4.3 底座参数计算: 50
结论 52
参考文献 53
外文翻译 55
致谢 76
附录1 77
附录2 86
|