ГхДВЩЯСЯЛњаЕЪжЕФЩшМЦ
РДдДЃК56doc.com зЪСЯБрКХЃК5D4319 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D4319
зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
еЊЁЁЁЁвЊ
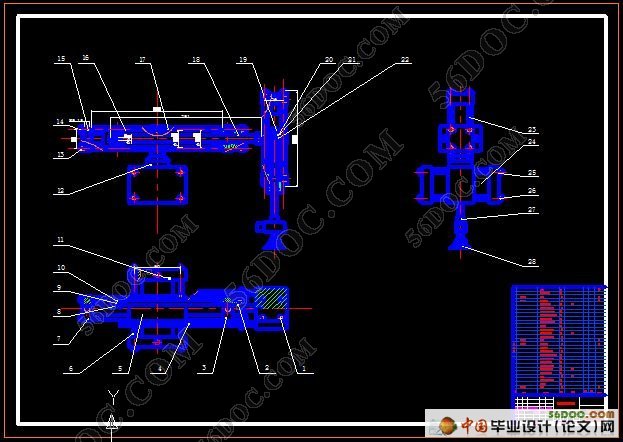
ЙЄвЕЛњаЕЪжЪЧНќМИЪЎФъРДЗЂеЙЦ№РДЕФвЛжжИпПЦММздЖЏЛЏЩњВњЩшБИЁЃЩњВњжагІгУЛњаЕЪжПЩвдЬсИпЩњВњЕФздЖЏЛЏЫЎЦНКЭРЭЖЏЩњВњТЪЃЌПЩвдМѕЧсРЭЖЏЧПЖШЁЂБЃжЄВњЦЗжЪСПЁЂЪЕЯжАВШЋЩњВњЁЃБОЩшМЦЪЧеыЖдГхДВЕФЙЄзїЬиЕуНјааЕФзЈгУЛњаЕЪжЩшМЦЁЃГхДВМгЙЄЖрЮЊАхВФМўЃЌвђДЫдкБОЩшМЦжаЛњаЕЪжЕФЪжВПВЩгУЦјСїИКбЙЪНЮќХЬЛњЙЙЃЌЗНБуЮќШЁВФСЯЁЃећИіЛњаЕЪжВЩгУдВжљзјБъНсЙЙЃЌЪжБлгУЫЎЦНКЭЪњжБСНИіЦјбЙИзЭЦЖЏЃЌФмЙЛПьЫйЭъГЩНЋЙЄМўЮќШЁЕНЙЄзїЮЛжУЕФЖЏзїЃЌЬсИпЙЄзїаЇТЪЁЃ
ЙиМќДЪЃКГхДВ ЛњаЕЪж здЖЏЛЏ
Abstract
Industrial manipulator is in recent decades developed a kind of hing-tech automation production equipment.Production application manipulator can be used to increase the production level of automation and labor productivity, reduce labor intensity, assure product quality, achieve the safety in production.This design is aimed at the working characteristics of punch special manipulator design.For more impacting processing,so in this board piece in the design of manipulator hand adopting airflow suction cups institutions,convenient draw materials.The whole manipulator using cylindrical coordinates structure,with horizontal and vertical two arms.The air cylinder can rapidly push completion will draw to work position of workpiece action,improve work efficiency.
KeyWordsЃКpunching machine manipulator automation
1.ЛњаЕЪжЮЊГхДВЛњаЕЪжЃЌбЁгУдВжљзјБъКЭШ§здгЩЖШЃЌЛњаЕЪжЕФИїжДааЛњЙЙАќРЈЪжВПЪжБлбќВПЕШЁЃВЩгУИКбЙЪНЮќХЬРДЮќШЁАхВФСЯЁЃ
2.ИУЛњаЕЪждкЙЄзїжаашвЊ3жждЫЖЏЃЌЦфжаЫЎЦНЪжБлЕФЩьЫѕКЭЪњжБЪжБлЕФЩ§НЕЮЊСНИіжБЯпдЫЖЏЃЌСэвЛИіЮЊЪжБлЕФЛизЊдЫЖЏЁЃзлКЯПМТЧЛњаЕЪжздгЩЖШЪ§ФПШЁ3ЃЌзјБъаЮЪНбЁдёдВжљзјБъаЮЪНЃЌМДвЛИізЊЖЏздгЩЖШЃЌСНИівЦЖЏздгЩЖШЁЃЦфЬиЕуЪЧНсЙЙБШНЯМђЕЅЃЌЪжБлдЫЖЏЗЖЮЇДѓЃЌЧвгаНЯИпЕФЖЈЮЛОЋЖШЁЃ
3.ПМТЧЕНбќВПЪЧЛњаЕЪжЕФЕквЛИіЛизЊЙиНкЃЌЖдЛњаЕЪжзюжеОЋЖШгАЯьНЯДѓЃЌЙЪВЩгУГнТжГнЬѕЪНАкЖЏЦјИзЪЕЯжбќВПЕФЛизЊдЫЖЏЁЃ
4.ПМТЧЕНЛњаЕЪжЕФЖЏЬЌадФмМАдЫЖЏЕФЮШЖЈадЁЂАВШЋадЃЌСНЪжБлЕФЧ§ЖЏЗНЪНОљбЁдёЦјбЙЧ§ЖЏЗНЪНЃЌЭЈЙ§ЦјбЙИзжБНгЧ§ЖЏЪжБлЕФдЫЖЏЁЃ
5.БОДЮЩшМЦЫљЩшМЦЕФЛњаЕЪжНсЙЙМђЕЅЃЌЬхЛ§аЁЧЩЃЌЪЪгУгкаЁаЭГхДВЩЯСЯЪЙгУЁЃИУЛњаЕЪжгадЫЖЏЫйЖШПьЃЌЖЈЮЛзМШЗЕШЬиЕуЁЃ
ЛњаЕЪжЕФЛљБОВЮЪ§газЅжиЃЈМДБлСІЃЉЁЂздгЩЖШЁЂЙЄзїааГЬЃЈЛђзЊНЧЃЉЁЂЙЄзїЫйЖШКЭЖЈЮЛОЋЖШЁЃ
Щ§НЕааГЬЃК80КСУз
ЪжБлЩьЫѕааГЬЃК200КСУз
ЪжБлЛизЊНЧЖШЃК0~90°
Ч§ЖЏЗНЪНЃКЦјбЙЧ§ЖЏ
ПижЦЗНЪНЃКЕуЮЛГЬађПижЦ
ФПЁЁЁЁТМ 16000зж
еЊЁЁЁЁвЊ I
Abstract II
1 аїТл 1
1.1 ЙЄвЕЛњаЕЪжИХЪі 1
1.2 ЙЄвЕЛњаЕЪжЕФЙњФкЭтбаОПЯжзДКЭЗЂеЙЧїЪЦ 2
1.2.1 ЦјЖЏЛњаЕЪжЕФЗЂеЙ 3
1.3 ЛњаЕЪжЕФзщГЩ 6
1.4 БОДЮЩшМЦЕФФПЕФ 9
2 ЛњаЕЪжЕФзмЬхЩшМЦ 10
2.1 ЛњаЕЪжзмЬхНсЙЙРраЭ 10
2.1.1 ЩшМЦОпЬхВЩгУЗНАИ 12
2.2ЛњаЕЪжбќВПНсЙЙ 14
2.2.1 бќВПНсЙЙОпЬхВЩгУЗНАИ 14
2.3ЛњаЕЪжЪжБлНсЙЙ 15
2.3.1 ЪжБлНсЙЙОпЬхВЩгУЗНАИ 16
2.4ЛњаЕЪжЪжВПНсЙЙ 20
2.4.1 ецПеЯЕЭГЕФзщГЩ 20
2.4.1 ЪжВПецПеЗЂЩњЦїЕФдРэ 21
3 ЛљБОВЮЪ§ЕФШЗЖЈ 24
3.1 ВЮЪ§ШЗЖЈ 24
3.1.1 зЅжиЃЈМДБлСІЃЉ 24
3.1.2здгЩЖШЁЂЙЄзїааГЬМАзЊНЧ 24
3.1.3ЙЄзїЫйЖШ 24
3.1.4ЖЈЮЛОЋЖШ 25
4 ЛњаЕЪжЛњаЕНсЙЙЩшМЦ 26
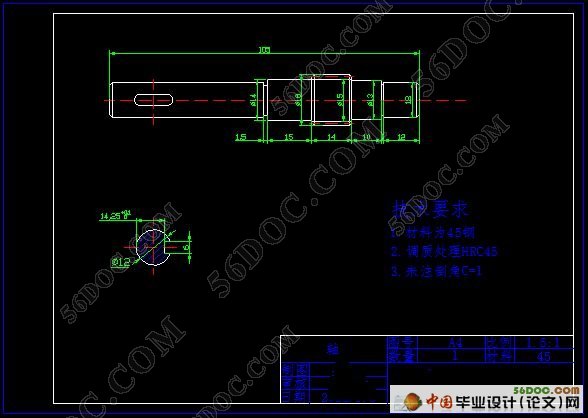
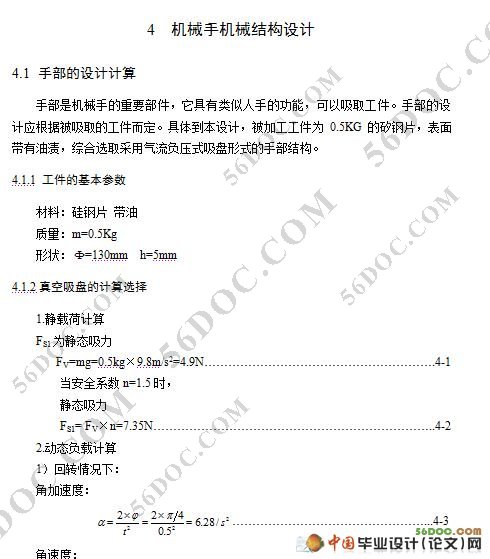
4.1 ЪжВПЕФЩшМЦМЦЫу 26
4.1.1 ЙЄМўЕФЛљБОВЮЪ§ 26
4.1.2ецПеЮќХЬЕФМЦЫубЁдё 26
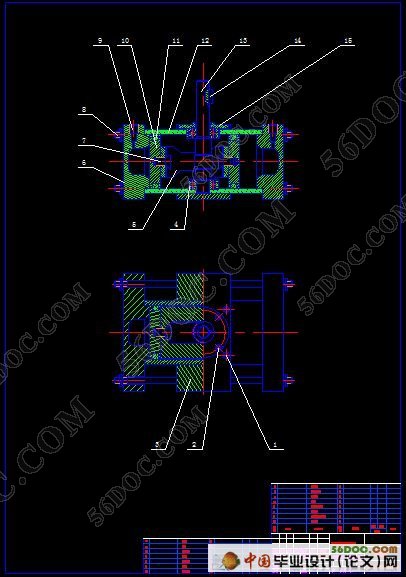
4.2 ЪжБлЕФЩшМЦМЦЫу 29
4.2.1 ЪњжБЪжБлЕФЩшМЦМЦЫу 29
4.2.2ЫЎЦНЪжБлЕФЩшМЦМЦЫу 34
4.3 бќВПЕФЩшМЦМЦЫу 39
Нс Тл 43
ВЮПМЮФЯз 44
жТ аЛ 45
|