еЊЁЁЁЁвЊ
ЙЄвЕЛњЦїШЫвЛАуПЩРэНтЮЊЃКдкЙЄвЕздЖЏЛЏгІгУСьгђжаЕФвЛжжздЖЏПижЦЁЂПЩжиИДБрГЬЁЂЖрЙІФмЁЂЖрздгЩЖШЕФВйзїЛњЃЈЙЬЖЈЪНЕФЛђЪЧвЦЖЏЪНЕФЃЉЃЌгУгкАсдЫВФСЯЁЂЙЄМўЁЂВйГжЙЄОпЛђМьВтзАжУЃЌЭъГЩИїжжзївЕЁЃ
НќФъРДЫцзХЙЄвЕздЖЏЛЏЕФЗЂеЙЛњаЕЪжж№НЅГЩЮЊвЛУХаТаЫЕФбЇПЦЃЌВЂЕУЕНСЫНЯПьЕФЗЂеЙЁЃЛњаЕЪжЙуЗКЕигІгУгкЖЭбЙЁЂГхбЙЁЂЖЭдьЁЂКИНгЁЂзАХфЁЂЛњМгЁЂХчЦсЁЂШШДІРэЕШИїИіаавЕЁЃЬиБ№ЪЧдкБПжиЁЂИпЮТЁЂгаЖОЁЂЮЃЯеЁЂЗХЩфадЁЂЖрЗлГОЕШЖёСгЕФРЭЖЏЛЗОГжаЃЌЛњаЕЪжгЩгкЦфЯджјЕФгХЕуЖјЪмЕНЬиБ№жиЪгЁЃ
ЛњДВЩЯСЯЛњаЕЪжЪЧЕфаЭЕФЛњЕчвЛЬхЛЏЩшБИЃЌЫќПЩздЖЏЕиЮЊЛњДВзЅШЁЙЄМўЃЌШЁДњВйзїШЫдБЦЕЗБШЁСЯЃЌНЕЕЭРЭЖЏЧПЖШЃЌЬсИпЙЄзїаЇТЪЁЃ
ЛњаЕЪжзд1999 ФъЭЖШыдЫаа, ЙЄзїАВШЋПЩПП, аЇЙћСМКУ, ПЩгУзіЪ§ПиЛњДВздЖЏЩЯСЯЩшБИКЭЩњВњЯпЩЯЕФздЖЏзЅШЁЩшБИЁЃМИФъРД, ж№ВНПЊЗЂСЫЯрЙиЪЕбщЁЂЪЕбЕНЬбЇЯюФП, вдЛњаЕЪжзїЮЊЪЕбщ(бЕ) диЬх, ж№ВНаЮГЩСЫвдбЇЩњЮЊжїЬхЁЂРэТлгыЪЕМљЯрНсКЯЕФНЬбЇФЃЪН, МЄЗЂСЫбЇЩњЕФДДдьадКЭЖЏЪжФмСІ, ЮЊЬсИпбЇЩњЕФЙЄГЬЫижЪЁЂШЋУцЬсИпбЇЩњЕФзлКЯЫижЪДДдьСЫЛљДЁЬѕМўЁЃ
ЙиМќДЪЃКГЕДВЩЯЯТСЯЛњаЕЪж ЦјбЙЯЕЭГ НсЙЙЩшМЦ
Abstract
Industrial robot can generally be understood as: in industrial automation applications in the field of a kind of automatic control, can repeat programming, multi-function, many of the freedom of CaoZuoJi (fixed or movable), used for material handling, workpiece, conducted tools or detection device, finish all kinds of assignments.
In recent years with the development of industrial automation manipulator gradually become a new discipline, and the rapid development. Manipulator is widely used in forging press, stamping, forging, welding, assembling, and machining, paint, heat treatment, and other industries. Especially in heavy, high temperature, toxic and dangerous, radioactive, many dust etc of bad labor environment, due to its advantages of significant manipulator by special attention.
Machine feeding manipulator is typical of electromechanical equipment, it can automatically grab for machine tools, to replace the operators frequently take material, the reduction of labor intensity, improve work efficiency.
Manipulator since 1999 are put into operation, safe and reliable work, the effect is good, can be used as nc machine tools automatic feeding equipment and production line acquirement equipment. For several years, and gradually developed related experiment, practice teaching program in experiments (training) as a manipulator carrier, and gradually formed a take the student as the main body, the theory and the practice teaching mode, stimulate the students' creativity and practical ability, to improve the students' project quality, improve the students' comprehensive quality created the basic conditions.
KeyWordsЃКLathe up-down material manipulator Pneumatic system Structure design
БОЦЊЩшМЦЕФЛњаЕЪжзлКЯКЭдЫгУСЫЛњаЕСуМўЁЂРэТлСІбЇЁЂВФСЯСІбЇЁЂЛњаЕдРэЁЂН№ЪєЙЄвебЇЁЂШШДІРэЁЂММЪѕВтСПЁЂЛњаЕжЦЭМЕШжЊЪЖЃЌЫќжївЊЪЧгІгУдкФЧаЉЕЅЕїЁЂЦЕЗБЕФВйзїжагУвдДњЬцШЫЕФРЭЖЏНјааЙЄзїЃЌЫќЕФжївЊгХЕуЪЧЃК
1. ЙЄзїЪБМфГжОУЃЌВЛЛсГіЯжШЫЕФЦЃРЭЃЌПЩвджиИДВЛЖЯЕФРЭЖЏЃЌЮЌГжСїЫЎЯпЕФе§ГЃЙЄзїЁЃ
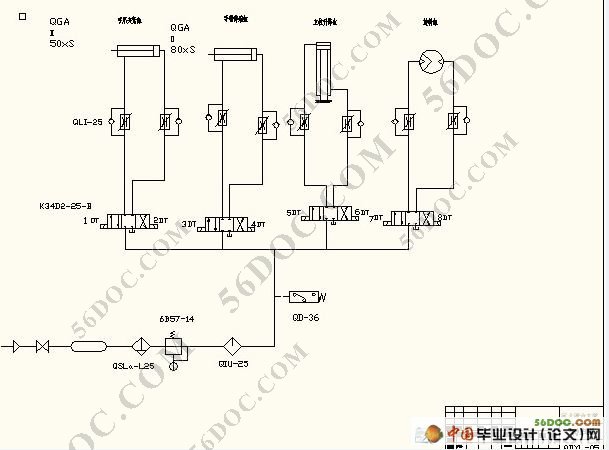
2. ЖдЛЗОГЪЪгІадЧПЃЌПЩвддкЖрЗлГОЁЂвзШМЁЂвзБЌЁЂЗХЩфадЧП ЕШЖёСгЛЗОГжаЙЄзїЁЃ
3. дЫЖЏОЋШЗЁЂСщЛюЁЂЬиБ№ЪЧдкМЦЫуЛњЕФПижЦЯТЃЌПЩвдДяЕНЗЧГЃИпЕФОЋЖШвЊЧѓЁЃ
4. ЭЈгУадКУЃЌГ§СЫЬиЖЈгУЭОЭтЃЌЪЪЕБИФБфЪжВПЃЌБуПЩвдЭъГЩХчЭПЁЂКИНгЕШЁЃ
5. ЙЄзїаЇТЪИпЃЌЬсИпРЭЖЏЩњВњТЪЕФЭЌЪБвВЬсИпСЫГЩБОЁЃ
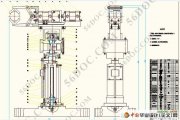
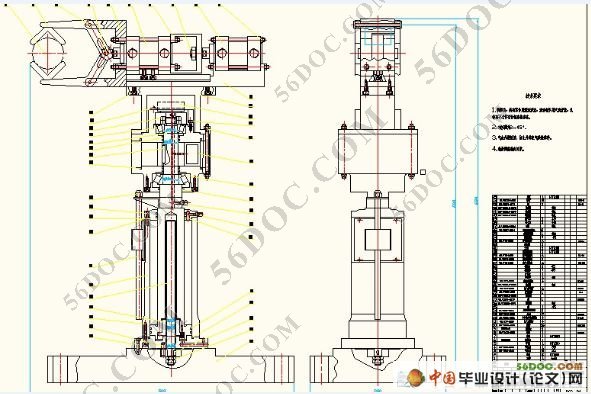
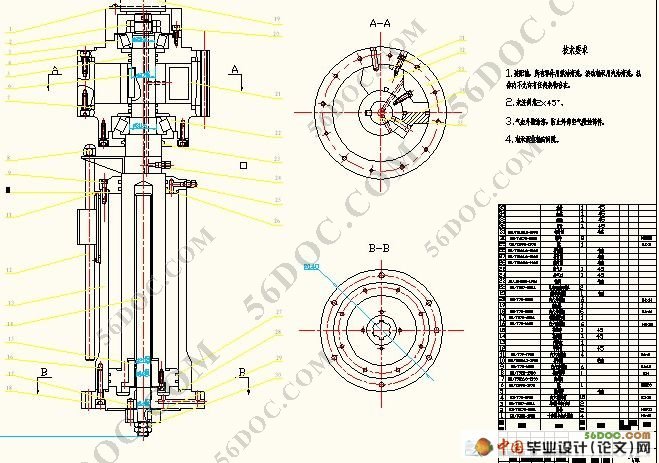
БОЛњаЕЪжПЩвдИљОнашвЊМгЩЯаазпЛњЙЙЃЌвдБуЪЕЯждЖОрРыВйзїЁЃ
ФПЁЁЁЁТМ 18000зж
еЊЁЁЁЁвЊ I
Abstract II
ЕквЛеТ ИХЪі 1
1. 1ЛњаЕЪжЕФЗЂеЙРњЪЗ 1
1. 2ЛњаЕЪжЕФЗЂеЙвтвх 1
1. 3ЛњаЕЪждкЛњаЕжЦдьжаЕФгІгУ 2
1. 3.1ЙњЭтгІгУ 2
1. 3.2ЙњФкгІгУ 3
ЕкЖўеТ ЙЄвЕЛњаЕЪж 4
2.1 ЙЄвЕЛњаЕЪжЕФЗжРр 4
2.2ЙЄвЕЛњаЕЪжЕФЧ§ЖЏЗНЪН 4
2.2.1ЦјбЙЧ§ЖЏ 4
2.2.2вКбЙЧ§ЖЏ 5
2.3 ЙЄвЕЛњаЕЪжЕФЩшМЦЗНЗЈ 6
2.3.1ЪжВПЕФЩшМЦ 6
2.3.2ЭѓВПЕФЩшМЦ 7
2.3.3БлВПЕФЩшМЦвЊЧѓ 8
2.3.4ЛњаЕЪжЕФааГЬЮЛжУМьВтзАжУ 9
ЕкШ§еТ ГЕДВЩЯЯТСЯЛњаЕЪжЗНАИБШНЯ 12
3. 1ЙЄвЕЛњаЕЪжИХЪі 12
3. 2ЗНАИЩшМЦКЭЖдБШ 13
3. 2.1ЗНАИ1 13
3. 2.2ЗНАИ2 16
3. 2.3ЗНАИ3 18
3. 2.4ЗНАИЖдБШ 19
ЕкЫФеТ ЪжВПМЦЫугыЗжЮі 20
4.1 ЪжВПМЦЫугыЗжЮі 20
4.1.1 ЛЌВлИмИЫЪНЪжВПЩшМЦЕФЛљБОвЊЧѓ 20
4.1.2 ЪжВПЕФМЦЫуКЭЗжЮі 20
4.2 ЭѓВПМЦЫугыЗжЮі 27
4.2.1 ЭѓВПЩшМЦЕФЛљБОвЊЧѓ 27
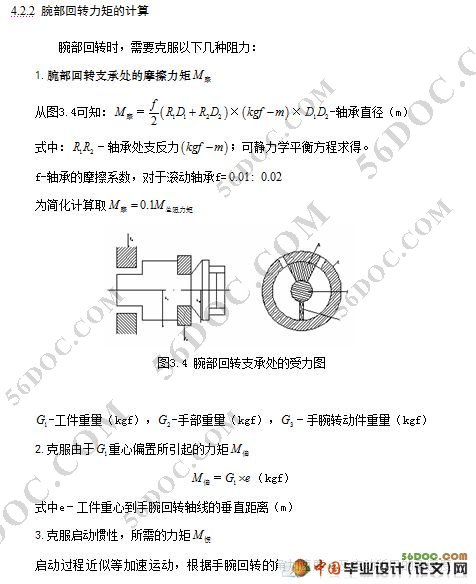
4.2.2 ЭѓВПЛизЊСІОиЕФМЦЫу 28
4.2.3 ЭѓВПАкЖЏгЭИзЩшМЦ 31
4.2.4 бЁМќВЂаЃКЫЧПЖШ 33
4.3 БлВПМЦЫугыЗжЮі 34
4.3.1 БлВПЩшМЦЕФЛљБОвЊЧѓ 34
4.3.2 ЪжБлЕФЩшМЦМЦЫу 37
4.4 ЛњЩэМЦЫугыЗжЮі 45
4.5БОеТаЁНс 45
Нс Тл 46
ВЮПМЮФЯз 47
жТ аЛ 48
ИН ТМ 50
|