油茶采摘机械手的机构设计(包含材料:任务书,毕业论文说明书5300字,幻灯片ppt,cad图纸)
摘 要
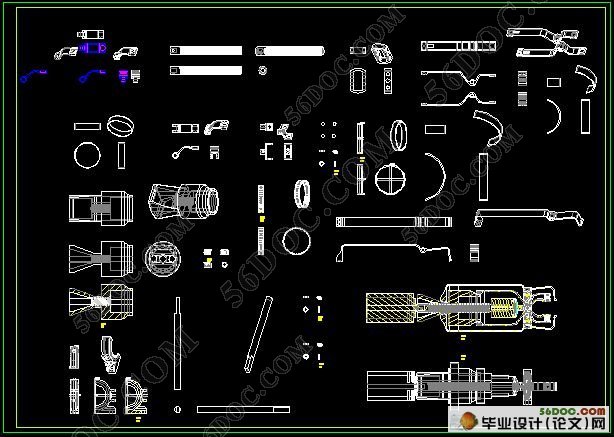
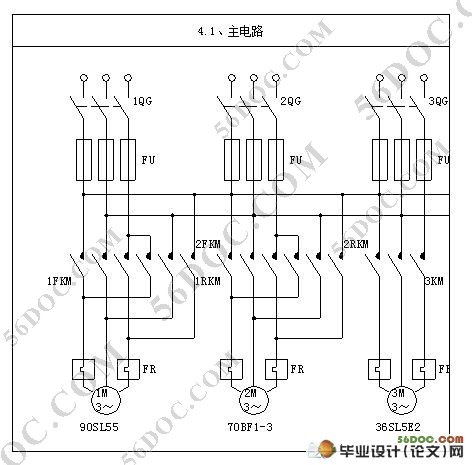
本课题运用制图软件对机械手采摘油茶进行机构设计。包括:旋转机构,蜗轮蜗杆减速装置,直齿减速装置;升降机构,气压缸升降装置;摆臂机构,气压装置和四杆装置;手抓机构,滑动螺旋传动装置,手抓抓紧放开装置,手抓自转装置;PLC程控系统,继电器-接触器控制系统,主电路,PLC外部接线,梯形图,指令语句表。用AutoCAD绘制机构的二维图形,用Pro/E绘制机构的三维造型。熟练掌握AutoCAD和Pro/E绘图,对机械原理、机械设计及机电一体化有较深入的理解和认识。
关键词:油茶采摘、机械手、PLC程序控制系统
Abstract
This subject uses the software of making maps to pluck the tea-oil camellia and design the organization to the manipulator. Including the rotate organization, the worm gear worm decelerating device,the spur gear decelerating device;the hoist or lower organization, the barometric pressure cylinder hoists or lower device; the wave arm organization, atmospheric pressure device and four device ,the skids screw gearing,the hold organization , the slip spiral transmission device, the holding and unlock device, hold the rotation device ; PLC programme-controlled system, the relay - contact device control system.Main circuit, PLC exterior wiring, trapezoidal chart, instruction sentence table.Draw the two-dimentional figures of the organization with AutoCAD, draw the three-dimensional model of the organization with Pro/E. Grasp AutoCAD and Pro/E drawing skillfully, integrate deeper understanding and know to mechanism, machine design and integration of machinery.
Key words:The tea-oil tree picks, the manipulator, the PLC procedure control system
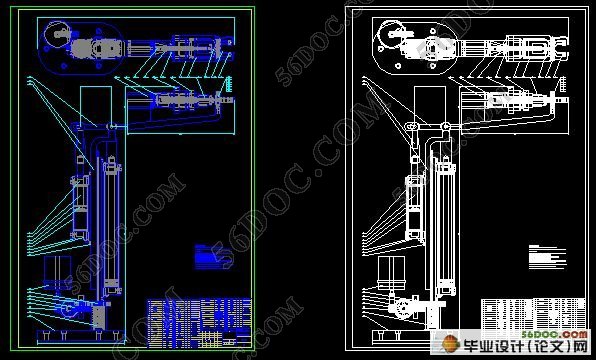
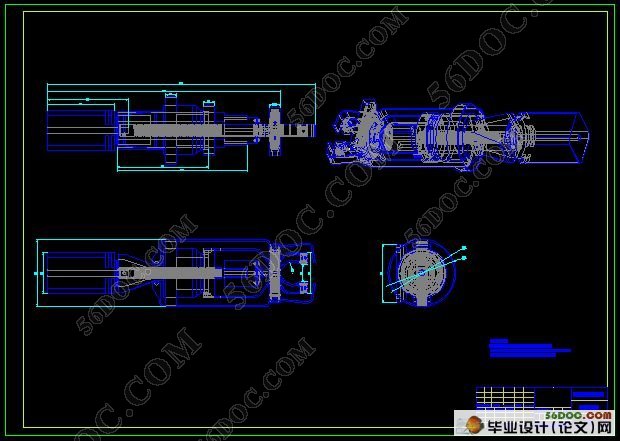
本机械手工作原理:底盘通过蜗轮蜗杆二级减速、圆柱直齿减速获得转速为4.35º/s,运用两个行程开关控制机械手左右摆动120º的扇形区域内;手臂升降通过气缸行程为374mm,经滑块导轨实现上下运动;摆臂通过气缸行程为128mm,经过四杆装置实现沿水平上下摆幅为30º的运动;手抓抓紧、放开通过步进电动机时间为t=4s,经滑动螺母实现对目标的夹紧、放松,并通过伺服电动机带动内手抓自转达到脱落目标的目的。
目 录
摘 要
Abstract
一、前 言 1
二、油茶采摘机械手原理图 2
三、油茶采摘机械手的设计与选型 4
3.1、电动机的选型 4
3.2、旋 转 减 速 机 构 5
3.2.1、第一级蜗轮蜗杆减速装置 5
3.2.2、第二级蜗轮蜗杆减速装置 7
3.2.3、直齿减速装置 8
3.2.4、旋转机构转速 9
3.3、气 压 升 降、摆 臂 机 构 9
3.3.1气压升降装置 10
3.3.2气压摆臂装置 10
3.4、手 抓 机 构 10
3.4.1、滑动螺旋传动装置 10
3.4.2、手抓工作装置 11
四、油茶采摘机械手的PLC程序控制系统 12
4.1、主电路 12
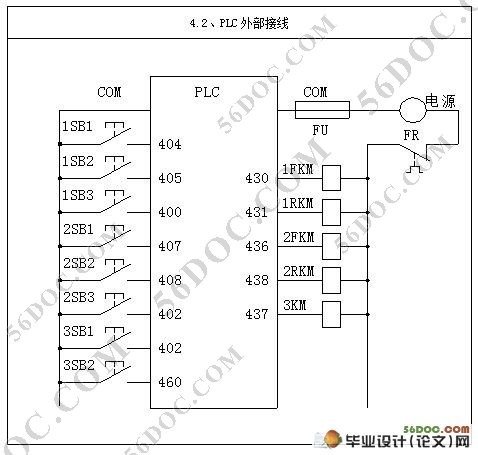
4.2、PLC外部接线 13
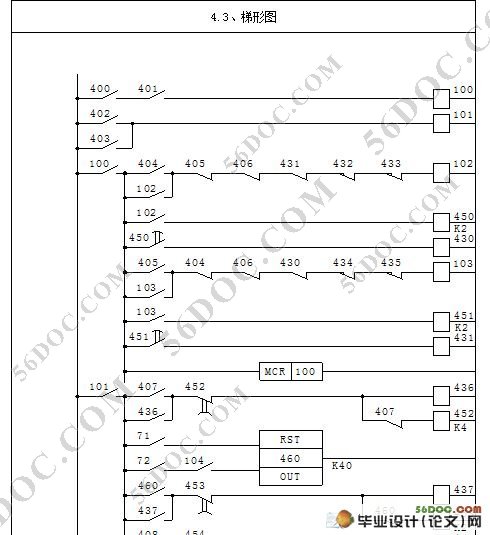
4.3、梯形图 14
4.4、指令语句表 15
参 考 文 献 16
致 谢 17
|