自动线通用多关节机械手设计☆(含选题审批表,任务书,开题报告,中期检查表,论文说明书8600字,CAD图纸9张)
摘 要:工业机械手是工业生产的必然产物,它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。因而具有强大的生命力受到人们的广泛重视和欢迎。实践证明,工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。工业生产中经常出现的笨重工件的搬运和长期频繁、单调的操作,采用机械手是有效的。此外,它能在高温、低温、深水、宇宙、放射性和其他有毒、污染环境条件下进行操作,更显示其优越性,有着广阔的发展前途。液压机械手具有快速、高效等优点。该机械手采用液压驱动,控制手臂的伸缩、手腕的回转和手部的抓放运动,上下运动由电机控制[1]。
关键词:工业;机械手;液压;
Design of the manipulator General Multi-joint for production line
Abstract:Industrial machinery hand is the inevitable product of industrial production, it is a copy of the upper part of the human body functions,it is accordance with the scheduled transfer request or the work piece hold the tools to operate the equipment automation technology, industrial automation, and promote the further development of industrial production from the An important role. So they have strong vitality of the people by the extensive attention and welcome. Practice has proved that the industrial robot can replace the staff of the heavy labor, significantly reduced labor intensity of workers and improve working conditions, improve labor productivity and the level of automation. Industrial production in the often cumbersome work piece handling and frequent long-term, monotonous operation, a mechanical hand to be effective. In addition, it can at high temperature, low temperature, Sham Shum Po, the universe, radioactive and other toxic and pollution of the environment under the conditions of operation, but also show its superiority, there are broad development prospects. Hydraulic manipulator is fast, efficient, and other advantages. The mechanical hand used hydraulic drive, control the telescopic arm, wrist and hand the rotary-grasping movement, movement from top to bottom by motor control.
Key words:Industry;Manipulator; Hydraulic;
主要内容和要求
自动线通用多关节机械手的设计主要用于机械设备间进行搬运和卸装工件。其技术参数为:
1、抓重:20Kg (夹持式手部)
2、自由度数:3~4个自由度
3、座标型式:圆柱座标
4、最大工作半径:1600mm
5、手臂最大中心高:900mm
根据所给的设计参数,设计自动线通用多关节机械手。
一、确定机械手总体传动方案,查阅相关资料
二、对主要零件进行设计计算,选定各标准件
三、绘制机械手总装图
四、绘制部分自制零件的工程图
五、编写设计说明书
设计说明书的内容就包括传动方案的拟定及各自行设计零件的设计计算过程,必要时应用图表说明.
说明:设计工作量应至少完成折合A0号图纸三张和一份12000字以上的设计计算说明书。
机械手的主要部件及运动参数设计
根据设计任务,为了满足设计要求,本设计关于机械手具有4个自由度既:手部抓取;手臂伸缩;手臂回转;手臂升降4个主要运动。
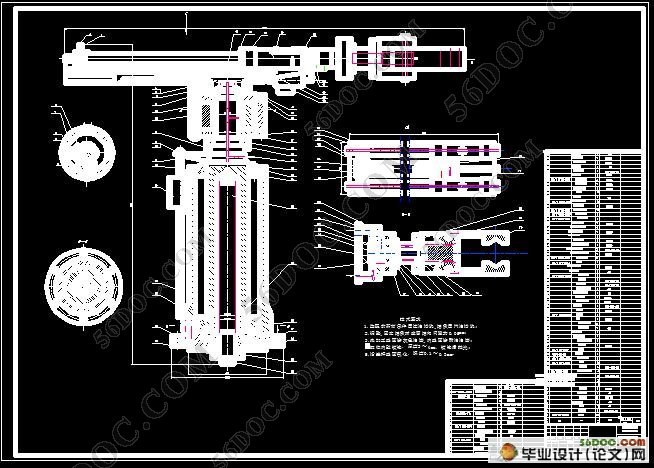
本设计机械手主要由3个大部件和4个液压缸组成:
(1)手部,采用一个直线液压缸,通过机构运动实现手抓的张合;
(2)臂部,采用直线缸来实现手臂平动0.8m;
(3)机身,采用一个直线缸和一个回转缸来实现手臂升降和回转。
驱动机构是工业机械手的重要组成部分, 工业机械手的性能价格比在很大程度上取决于驱动方案及其装置。根据动力源的不同, 工业机械手的驱动机构大致可分为液压、气动、电动和机械驱动等四类。采用液压机构驱动机械手,结构简单、尺寸紧凑、重量轻、控制方便,驱动力大等优点。因此,机械手的驱动方案选择液压驱动。
设计技术参数:
(1)抓重:20Kg (夹持式手部)
(2)自由度数:4个自由度
(3)座标型式:圆柱座标
(4)最大工作半径:1600mm
(5)手臂最大中心高:900mm
(6)手臂运动参数
伸缩行程:800mm
伸缩速度: 250mm/s
升降行程: 330mm
升降速度: 60mm/s
回转范围: 180°
(7)手腕运动参数
回转范围: 180°[3]
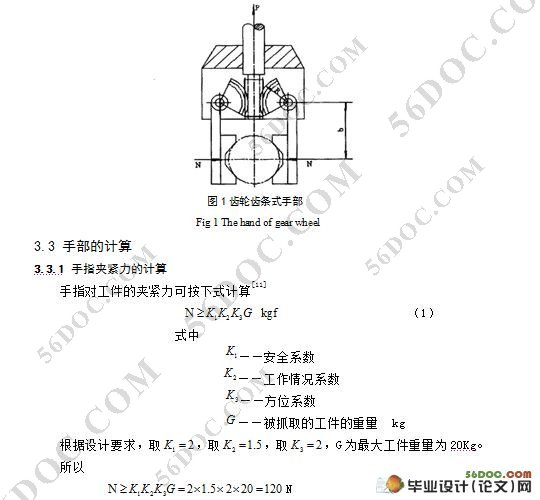
3 手部的设计
3.1 手部的基本要求
1、有适当的夹紧力
手部在工作时,应具有适当的夹紧力,以保证夹持稳定可靠,变形小,且不损坏工件的已加工表面。对于刚性很差的工件夹紧力大小应该设计得可以调节,对于笨重的工件应考虑采用自锁安全装置。
2、有足够的开闭范围
夹持类手部的手指都有张开和闭合装置。工作时,一个手指开闭位置以最大变化量称为开闭范围。对于回转型手部手指开闭范围,可用开闭角和手指夹紧端长度表示。手指开闭范围的要求与许多因素有关,如工件的形状和尺寸,手指的形状和尺寸,一般来说,如工作环境许可,开闭范围大一些较好
3、力求结构简单,重量轻,体积小
手部处于腕部的最前端,工作时运动状态多变,其结构,重量和体积直接影响整个机械手的结构,抓重,定位精度,运动速度等性能。因此,在设计手部时,必须力求结构简单,重量轻,体积小。
4、手指应有一定的强度和刚度
5、其它要求
因此送料时,夹紧机械手,根据工件的形状,采用最常用的外卡式两指钳爪,夹紧方式用常闭式弹簧夹紧,松开时,用单作用式液压缸。此种结构较为简单,制造方便[8] [9]。
|