RRR平面连杆机构的动态仿真(MATLAB)(含任务书,开题报告,外文翻译,论文说明书12000字,MATLAB仿真)
摘要:平面连杆机构的动态仿真分为机构的运动分析和动力分析两种。机构的运动分析,主要获得机构中某些构件的位移、角速度和角加速度,以及某些点的轨迹、速度和加速度,它是机械设计及评价机械运动和动力性能的基础,也是分析现有机械优化综合新机械的基本手段;机构的动力分析,主要是在运动学分析的基础上,由已知工作阻力,求出运动副的约束反力和驱动力(或力矩),为选择和设计轴承、零部件强度的计算及选择原动机提供理论依据。
本文用矢量和矩阵理论建立了适用于MATLAB/SIMULINK仿真的曲柄、RRRⅡ级杆组运动学和动力学数学模型,以该数学模型编制了M函数仿真模块,对给定的RRR四杆机构和RRR-RRR六杆机构进行了建模和仿真,通过仿真得到各转动副的反力及驱动力矩.其主要目的是以构成机构的基本杆组为仿真模块,搭建杆组MATLAB/SIMULINK仿真模型,可以对不同类型平面连杆机构进行运动学和动力学仿真和分析。
关键词:连杆机构 运动学 动力学 MATLAB/SIMULINK 仿真
Dynamic Simulation of RRR Planar Linkage
Abstract: Dynamic simulation of planar linkage is divided into two types of kinematic analysis and dynamic analysis. The Kinematic analysis, which is the basis of the mechanical design, evaluation of mechanical motion and the dynamic performance, and it is the basic of Analyze Optimal Synthesis of new machinery of existing machinery. the main access to institutions of certain components of the displacement, angular velocity and angular acceleration, and some points of track, speed and acceleration. The Dynamic Analysis, which provides a theoretical basis for Selecting and designing of bearings, parts strength calculation and selection of the original motivation, Constraints derived anti-vice campaign and the drive force (or torque) based on the analysis of kinematics and the Working resistance.
In this paper, using vector and matrix theory applicable to the MATLAB / SIMULINK simulation of the crank, RRR Ⅱ class bar group mathematical model of kinematics and dynamics, and using this mathematical model draw up M Function Simulation Module, a RRR four -bar linkage and a RRR-RRR six institutions were taken as example ,the procedures of modeling and simulating. Obtain the deputy of the anti-rotation force and driving torque through the simulation. Its main purpose is to constitute the body of the bar group Simulation Module, building the MATLAB / SIMULINK simulation model for the bar group, to do the kinematic and dynamic simulation and analysis for different types of planar linkage.
Keyword: Linkage Kinematics Dynamics MATLAB/SIMULINK Simulation
1、原始资料:
1)RRR四杆机构的原动曲柄转速、各构件长度与质量、工作阻力矩;
2)RRR-RRR六杆机构的原动曲柄转速、各构件长度与质量、工作阻力矩。
2、设计技术要求:
1)机构的运动学仿真;
2)机构的动力学仿真。
研究内容:
1、外文翻译;
2、MATLAB软件的使用;
3、平面连杆机构的组成原理;
4、RRRII级杆组MATLAB运动学仿真模块;
5、RRRII级杆组MATLAB动力学仿真模块;
6、RRR四杆机构和RRR-RRR六杆机构的设计;
7、RRR四杆机构和RRR-RRR六杆机构的运动学仿真;
8、RRR四杆机构和RRR-RRR六杆机构的动力学仿真。
设计方案:
1、收集有关资料、写开题报告;
2、翻译外文资料;
3、熟悉MATLAB软件;
4、学习RRRII级杆组MATLAB运动学和动力学仿真;
5、设计一个RRR四杆机构和一个RRR-RRR六杆机构;
6、RRR四杆机构和RRR-RRR六杆机构的动态仿真;
7、撰写毕业设计论文。
目 录
1 绪论
1.1选题的依据及意义 1
1.2国内外研究概况及发展趋势 1
1.3研究内容及实验方案 4
2 曲柄、RRRⅡ级杆组的MTALAB运动学仿真
2.1用MATLAB实现牛顿-辛普森求解 5
2.2用MATLAB进行速度分析 6
2.3曲柄、RRRⅡ级杆组MATLAB运动学仿真模块 7
2.4四杆机构的MATLAB运动学仿真 10
2.5四杆机构MATLAB运动学仿真结果 12
3 曲柄、RRRⅡ级杆组的MTALAB动力学仿真
3.1曲柄、RRRⅡ级杆组MATLAB动力学仿真模块 15
3.2四杆机构的MATLAB动力学仿真 19
3.3四杆机构MATLAB仿真模型的初值确定 21
3.4四杆机构MATLAB动力学仿真结果 21
4 RRR-RRR六杆机构的MTALAB运动学仿真
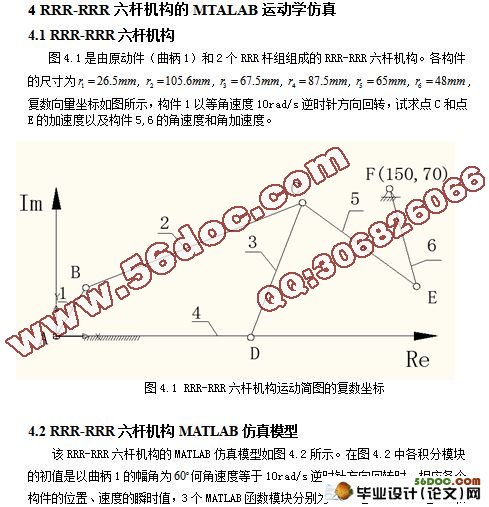
4.1 RRR-RRR六杆机构 24
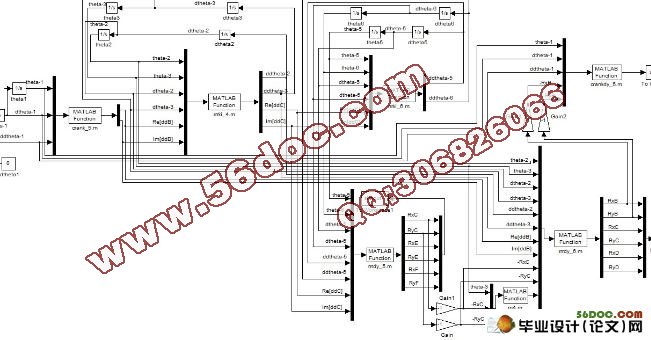
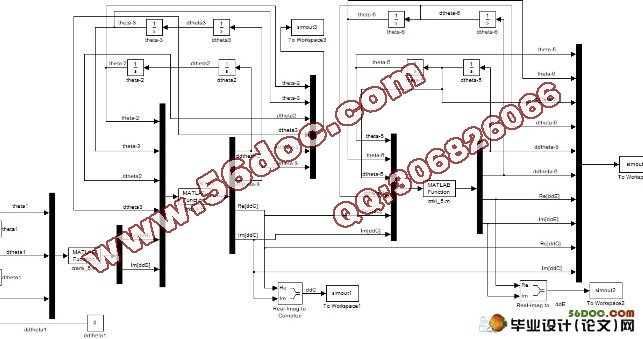
4.2 RRR-RRR六杆机构MATLAB仿真模型 24
4.3 RRR-RRR六杆机构MATLAB真模块 26
4.4 RRR-RRR六杆机构MATLAB仿真模块中初值的确定 27
4.5 RRR-RRR六杆机构MATLAB运动学仿真结果 29
5 RRR-RRR六杆机构的MTALAB动力学仿真
5.1 RRR-RRR六杆机构 33
5.2 RRR-RRR六杆机构MATLAB仿真模型 33
5.3 RRR-RRR六杆机构MATLAB仿真模块 35
5.4 RRR-RRR六杆机构MATLAB仿真模块中初值的确定 38
5.5 RRR-RRR六杆机构MATLAB运动学仿真结果 38
总 结 41
参考文献 42
致 谢 43
|