两级倒立摆设计(含CAD图,SolidWorks三维图)
来源:56doc.com 资料编号:5D15309 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D15309
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
两级倒立摆设计(含CAD图,SolidWorks三维图)(论文说明书12000字,CAD图纸12张,SolidWorks三维图)
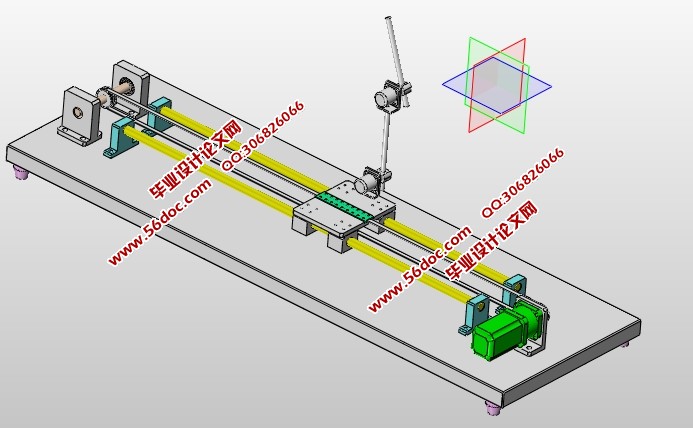
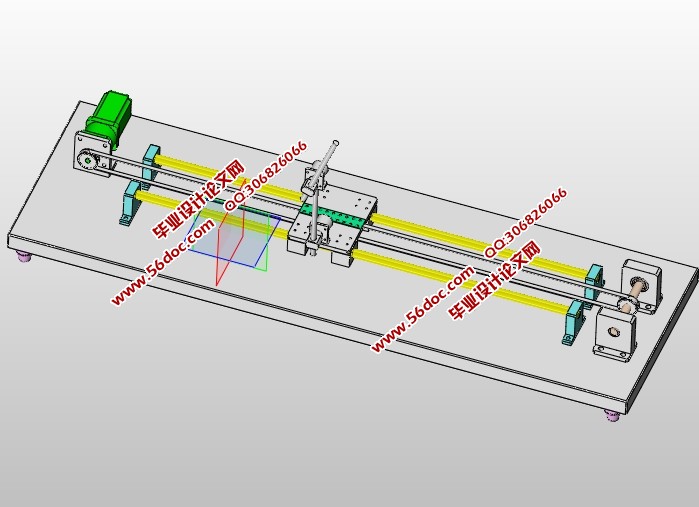
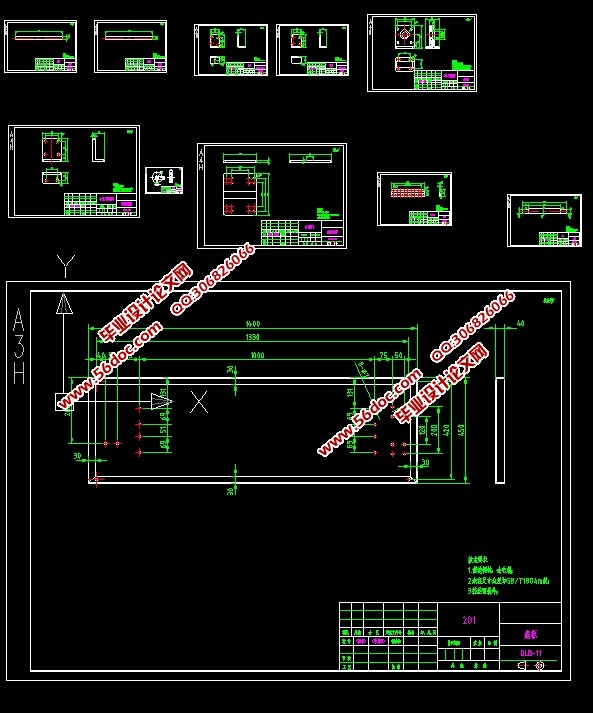
3.1倒立摆机电控制系统的组成
倒立摆机电控制系统硬件的组成主要包括:交流伺服电机、光电码盘、直线导杆、移动小车、传动带轮等等。
3.2控制系统硬件核心元件的选择
为实现倒立摆机电控制系统各方面性能的测试,需要用到伺服电机驱动系统,同步带轮传动系统,直线导杆装置等等,为了便于对倒立摆系统的研究有一个准确的数据,必要对控制系统中各元件进行准确的选型计算,这样才能对倒立摆机电控制系统中的个测试指标有一个准确的判断。
3.2.1伺服电机的选择及作用
2.3.2.1伺服电机的工作原理
在这次倒立摆机电控制系统的结构设计中,我们采用交流伺服电机驱动,伺服电机是一种最常用的电机,广泛应用于各行各业。具有单相电容式单相异步电动机交流伺服电动机定子结构,定子上设有两个位置90°绕组,励磁绕组的RF,它总是连接到AC电压UF;另一个是绕组连接控制,电压控制信号的UC。因此,交流伺服电机和伺服电机的两个。交流伺服电动机的转子通常是由鼠笼,但对伺服电机的机械特性有较宽的线性范围,速度,“旋转”现象和快速响应的性能,与普通电动机相比,应具有转子电阻和转动惯量小的特点。使用两种形式的转子结构:一个由导电材料制成的鼠笼转子高电阻率的电阻率高,为了减小转子的转动惯量,转子细长;另一种是由铝合金制成的空心杯转子,杯壁很薄,仅为二要减少磁路的磁阻,空心杯形,在固定在转子定子的地方,空心杯转子惯性矩小,响应速度快,运行稳定,因此被广泛应用。在控制电压的交流伺服电机,脉冲磁场产生只有励磁绕组的定子,转子和固定。当控制电压,将定子产生旋转磁场,转子沿着旋转磁场方向转动,在恒定负载的情况下,对控制电压改变电机的速度的大小,相位控制电压时相反,伺服电机反转。
3.2.2伺服电机的选型计算
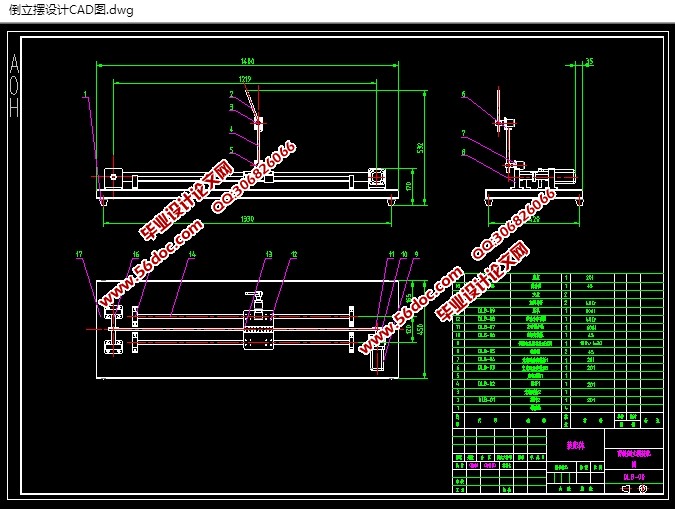
已知整个倒立摆机电控制系统的结构中,伺服电机所受到的负载来自移动小车的重力,摆杆的重力,光电码盘的重力以及直线导杆的重力和各方面的摩擦力,在这里,我们取总重量为10Kg,往复的范围为500mm~700mm,速度为1~2r/min。
目录
摘要..........................................................................................................2
Abstract................................................................................................2
第一章 引言...........................................................................................3
1.1 课题的研究背景和意义.......................................................................4
1.2倒立摆系统的工作原理......................................................................6
第二章倒立摆机电控制系统结构的总体设计.................................7
2.1 倒立摆机电控制系统结构的功能需求....................................................8
2.2 系统实现结构图.................................................................................9
第三章倒立摆机电控制系统结构设计............................................10
3.1控制系统的构成.................................................................................11
3.2控制系统硬件电路核心元件的选择....................................................11
3.2.1伺服电机的工作原理及选型计算..................................................12
3.2.2伺服电机的工作原理..................................................................12
3.2.3伺服电机的选型计算..................................................................13
3.3光电码盘的工作原理及作用................................................................13
3.3.1光电码盘的工作原理..................................................................14
3.4直线导杆的选择................................................................................17
3.5同步带轮传动的选择计算...................................................................20
第四章倒立摆机电控制系统中PID的控制算法的实现..............22
4.1PID控制算法简介..............................................................................23
4.1.2PID控制各部分的特点.................................................................23
4.1.3PID控制器各部分参数的选定........................................................23
4.2PID控制算法的实现...........................................................................23
结论........................................................................................................24
致谢........................................................................................................25
参考文献................................................................................................26
|