ЦјЖЏЛњаЕБлЕФЩшМЦ(PLC)
РДдДЃК56doc.com зЪСЯБрКХЃК5D10790 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D10790
зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
ЦјЖЏЛњаЕБлЕФЩшМЦ(PLC)(ШЮЮёЪщ,ПЊЬтБЈИц,ЭтЮФЗвы,НјЖШМЦЛЎБэ,ТлЮФЫЕУїЪщ16000зж)
еЊ вЊ
БОЮФМђвЊНщЩмСЫЙЄвЕЛњЦїШЫЕФИХФюЃЌНВЪіСЫЛњаЕБлЕФЗжРргыРњЪЗЛЙгаЕБНёЙњФкЭтЕФЗЂеЙзДПіЃЌЛњаЕБлгВМўКЭШэМўЕФзщГЩЃЌМДЛњаЕБлИїИіВПМўЕФећЬхГпДчЩшМЦгыаЃКЫЃЌЦјЖЏММЪѕЕФЬиЕугыгХЕуЃЌPLCПижЦЕФЬиЕуЃЌPLCПижЦЕФЦјЖЏЛњаЕБлЯЕЭГЕФЙЄзїдРэЁЃБОЮФЖдЛњаЕБлНјаазмЬхЕФЗНАИЩшМЦЃК
1ЁЂШЗЖЈСЫЛњаЕБлЕФзјБъаЮЪНЃЌздгЩЖШКЭЛњаЕБлЕФИїЯюММЪѕВЮЪ§ЁЃ
2ЁЂЩшМЦСЫЛњаЕБлЕФЪжБлНсЙЙЃЌМЦЫуГіСЫЛизЊЦјИзЕФГпДчДѓаЁвдМАЩ§НЕЦјИзЕФДѓаЁЃЌВЂЖдЪжБлЩьЫѕЦјИзНјааСЫбЁаЭКЭаЃКЫЁЃ
3ЁЂЩшМЦСЫЛњаЕБлЕФМаГжЪНЪжВПНсЙЙКЭЛњаЕБлЕФЪжЭѓНсЙЙЃЌМЦЫуГіСЫЪжЭѓзЊЖЏЪБЫљашЕФЧ§ЖЏСІОиКЭЛизЊЦјИзЕФЧ§ЖЏСІОиЁЃ
4ЁЂЩшМЦГіСЫЛњаЕБлЕФЦјЖЏЯЕЭГЃЌЛцжЦСЫЛњаЕБлЦјбЙЯЕЭГЙЄзїдРэЭМЁЃ
вђЮЊЩшМЦЕФЛњаЕБлЮЊЭЈгУЛњаЕБлЃЌЗжЮіСЫПЩБрГЬПижЦЦїЪЧШчКЮРДПижЦЦјЖЏЛњаЕБлЕФдЫЖЏгыЙЄзїЃЌПЩвдРћгУПЩБрГЬађПижЦЦїИљОнашвЊБраДВЛЭЌЕФГЬађЖдЛњаЕЪжНјааПижЦЃЌзюжезіГіСЫЛњаЕБлдЫЖЏЕФСїГЬЭМЁЃ
ЙиМќДЪЃКЦјЖЏЃЛЙЄвЕЛњЦїШЫЃЛЛњаЕБлЃЛPLCЁЃ
Abstract
This article briefly introduces the concept of industrial robots, telling the story of the classification of the mechanical arm and the historical and current development status at home and abroad, robot arm of hardware and software.The robot arm design and check the overall dimensions of the parts, the characteristics and advantages of pneumatic technology, PLC control, the characteristics of the working principle of PLC control system of pneumatic manipulator. In this article, the robot arm for the overall scheme design.
1ЁЂDetermining the coordinates of the mechanical arm formsЃЌdegrees of freedom, and the technical parameters of manipulator.
2ЁЂDesigning the manipulator arm structure, calculating the rotary cylinder size and the size of the lift cylinder, and the selection and checking of the telescopic cylinder and the arm .
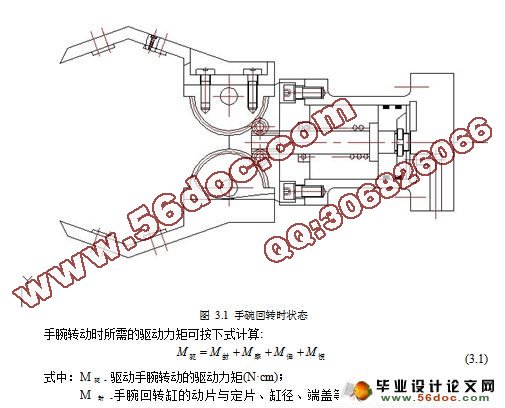
3ЁЂDesigning holding type hand structure of mechanical arm and the robot arm's wrist structure.Calculating the driving moment of the wrist when needed and driving moment of the rotary cylinder.
4ЁЂDesigning the pneumatic system of mechanical arm and the map of mechanical arm pressure system working principle.
5ЁЂBecause the mechanical arm is designed for general mechanical arm, analysis of the programmable logic controller is how to control the pneumatic motor and mechanical arm.We can make use of the programmable controller according to the need to write a different program to control the manipulator, finally making the mechanical arm movement flow chart.
Key words: Air pressure drive; Industrial robot; Robot arm; Programmable Logic Controller.
ФП ТМ
еЊ вЊ III
ABSTRACT IV
ФП ТМ V
1 аї Тл 1
1 .1 ЛњаЕБлИХТл 1
1.1.1 ЛњаЕБлРњЪЗгыЗЂеЙ 1
1.1.2 ЛњаЕБлЕФРњЪЗ 2
1.1.4 ЛњаЕБлЕФзщГЩ 2
1.1.4 ЛњаЕБлЕФЗжРр 3
1.2 ЦјЖЏММЪѕИХЪі 3
1.3 ЦјЖЏЛњаЕБлЕФЩшМЦвЊЧѓ 4
2 ЛњаЕБлећЬхЩшМЦЗНАИ 5
2.1 ЛњаЕБлЕФзљБъаЭЪНгыздгЩЖШ 5
2.2 ЛњаЕБлЕФЪжЭѓНсЙЙЗНАИЩшМЦ 5
2.3 ЛњаЕБлЕФЪжБлНсЙЙЗНАИЩшМЦ 6
2.4 ЛњаЕБлЕФЪжВПНсЙЙЗНАИЩшМЦ 6
2.5 ЛњаЕБлЕФЧ§ЖЏЗНАИЩшМЦ 6
2.6 ЛњаЕБлЕФПижЦЗНАИЩшМЦ 6
2.7 ЛњаЕБлЕФжївЊММЪѕВЮЪ§ 6
3 ЪжЭѓНсЙЙЩшМЦ 9
3.1 ЪжЭѓЕФздгЩЖШ 9
3.2 ЪжЭѓЕФЧ§ЖЏСІОиЕФМЦЫу 9
3.2.1 ЪжЭѓзЊЖЏЪБЫљашЕФЧ§ЖЏСІОи 9
3.2.2 ЛизЊЦјИзЕФЧ§ЖЏСІОиМЦЫу 11
3.2.3 ЪжЭѓЛизЊИзЕФГпДчМАЦфаЃКЫ 12
4 ЪжБлЩьЫѕЃЌЩ§НЕЃЌЛизЊЦјИзЕФГпДчЩшМЦгыаЃКЫ 15
4.1 ЪжБлЛизЊЦјИзЕФГпДчЩшМЦгыаЃКЫ 15
4.1.1 ГпДчЩшМЦ 15
4.1.2 ГпДчаЃКЫ 15
4.2 ЪжБлЩьЫѕЦјИзЕФГпДчЩшМЦгыаЃКЫ 16
4.2.1 ЪжБлЩьЫѕЦјИзЕФГпДчЩшМЦ 16
4.2.2 ГпДчаЃКЫ 16
4.2.3 ЦНКтзАжУ 16
4.2.4 ЕМЯђзАжУ 16
4.3 ЪжБлЩ§НЕЦјИзЕФГпДчЩшМЦгыаЃКЫ 17
4.3.1 ГпДчЩшМЦ 17
4.3.2 ГпДчаЃКЫ 17
5 ЪжВПНсЙЙЩшМЦ 18
5.1 МаГжЪНЪжВПНсЙЙ 18
5.1.1 ЪжжИЕФаЮзДКЭЗжРр 18
5.1.2 ЩшМЦЪБПМТЧЕФМИИіЮЪЬт 18
5.1.3 ЪжВПМаНєЦјИзЕФЩшМЦ 18
6 ЦјЖЏЯЕЭГЩшМЦ 22
6.1 ЦјЖЏЯЕЭГЩшМЦЕФжївЊФкШнМАЩшМЦГЬађ 22
6.2 ЦјбЙДЋЖЏЯЕЭГдРэЭМ 22
7 ЛњаЕБлЕФПижЦЗНЪН 25
7.1 ПЩБрГЬађПижЦЦїЕФбЁдёМАЙЄзїЙ§ГЬ 25
7.1.1 ПЩБрГЬађПижЦЦїЕФбЁдё 25
7.1.2 ПЩБрГЬађПижЦЦїЕФЙЄзїЙ§ГЬ 25
7.2 ПЩБрГЬађПижЦЦїЕФЪЙгУВНжш 25
7.3 ПижЦЯЕЭГЕФЙЄзїдРэ 26
7.4 ПижЦвЊЧѓ 26
7.4.1 ЪжЖЏЙЄзїЗНЪН 26
7.4.2 ЕЅЖЏЙЄзїЗНЪН 26
7.4.3 здЖЏЙЄзїЗНЪН 27
7.5 ЦјЖЏЛњаЕЪжЕФЙЄзїСїГЬ 27
8 Нс Тл 29
8.1 НсТл 29
8.2 ВЛзужЎДІМАеЙЭћ 29
жТ аЛ 30
ВЮПМЮФЯз 31
|